Hallo,
ich hab mal wieder ein Problem und zwar benutze ich den Encoder von
Reichelt mit der Nummer: STEC12E08. Diesen möchte ich zur Menüführung an
einem ATMEGA128 benutzen. Soweit funktioniert das fast, denn es werden
meist zwei Impulse pro Rastung gelistet, obwohl ich den Encoder schon
zig mal unterentprelle. Zuerst hab ich die normale
Graycodeentschlüsselung:
1
// Interruptrutine Encoder Abfrage
2
SIGNAL(SIG_OVERFLOW0){
3
4
staticcharenc_last=0x01;
5
chari=0;
6
7
if(PHASE_A)
8
i=1;
9
10
if(PHASE_B)
11
i^=3;// Graycode in Binär codieren
12
i-=enc_last;// Dofferenz zwischen Neuem und Leztem bilden
13
14
if(i&1){// bit 0 = value (1)
15
16
enc_last+=i;// Neues als Leztes speichern
17
enc_delta+=(i&2)-1;// bit 1 = Richtung (+/-)
18
}
19
}
enc_delta müsste eigentlich schon das Richtige liefern, aber weit
gefehlt. Meist werden bis zu 5 Impulse pro Rastung losgelassen. (Laut
Reichelt soll ich einen Encoder mit 24/24 haben, also eine Rastung = ein
Impuls).
So, nun hab ich das so gemacht, dass ich einfach nach einer bistimmten
Zeit (0,5 sec oder Länger) die Encodervariable abgefragt habe und wenn
diese positiv war einen Schitt nach oben gezählt habe und andersherrum.
Hier der Code:
1
// Funktion zum Encoder abfragen
2
uint8_tenc_count(uint8_tco){
3
4
if(enc_delta>0){// wenn Drehung nach rechts
5
6
count++;
7
co++;
8
9
}elseif(enc_delta<0){// wenn Drehung nach links
10
11
count--;
12
co--;
13
14
}
So nun konnte ich das soweit eindämmen, dass nunoch maximal 2 Impulse
kommen. diese Bekomme ich auch bei einer Abfragerate von > 2 sec nicht
weg, da stimmt doch was nicht oder???
Kann das am Encoder liegen?? ist der zu "Billig??" stimmt was mt der
Hardware nicht??
Danke schonmal vorweg
PS: rechts der Block das soll der Encoder sein.
@ Sönke Paschko (soeni)
>ich hab mal wieder ein Problem und zwar benutze ich den Encoder von>Reichelt mit der Nummer: STEC12E08.Drehgeber
Dort steht ales drin.
> if( PHASE_A )> i = 1;> if( PHASE_B )> i ^= 3; // Graycode in Binär codieren
Unsinnig und falsch. Man muss beide Phasen gleichzeitig erfassen.
Umrechen in binär ist Unsinn.
MFg
Falk
Die sicherste, schnellste und beste Methode bei Drehgebern ist immer die
Auswertung über Zustandswechsel.
Aus PHASE_A und PHASE_B hast Du ja 4 verschiedene Zustaände: 00,01,10
und 11.
Jetzt stellt man aus den 2 aktuellen Bits und den vorherigen 2 Bits
einen 4 Bit-Wert zusammen und geht damit in einen 4-Bit=16-Tabelle. Dort
steht drin, ob eine Drehung nach links oder rechts erfolgte.
Damit hast Du alle Probleme erschlagen. Es gibt kein Doppelzählen oder
5fach-Zählen.
Und diese Funktion rufe ich per Timer Interrupt auf? wenn ja, wie oft?
PS: wenn mein verwendeter Code falsch ist, kann dieser doch aus dem
Tutorial Drehimpulsgeber gelöscht werden oder?
Falk Brunner wrote:
> Dort steht ales drin.>>> if( PHASE_A )>> i = 1;>>> if( PHASE_B )>> i ^= 3; // Graycode in Binär codieren>> Unsinnig und falsch. Man muss beide Phasen gleichzeitig erfassen.> Umrechen in binär ist Unsinn.
Das ist ziemlich genau Peter Danneggers Code, wenn ich mich nicht irre.
Falk Brunner wrote:
> @ Sönke Paschko (soeni)>> if( PHASE_A )>> i = 1;>>> if( PHASE_B )>> i ^= 3; // Graycode in Binär codieren>> Unsinnig und falsch. Man muss beide Phasen gleichzeitig erfassen.> Umrechen in binär ist Unsinn.
Warum erzählst Du solchen Quatsch?
Versuch doch erstmal den Code zu verstehen.
Man kann sie garnicht gleichzeitig erfassen, da es in der Praxis keine
exakte Gleichzeitigkeit gibt.
Für den Algorithmus ist es gleichzeitig genug, wenn dazwischen keine 2
Phasenwechsel auftreten. Außerdem muß der Timerinterrupt schnell genug
erfolgen, daß zwischen 2 Aufrufen keine 2 Phasenwechsel auftreten.
Dann arbeitet der Algorithmus völlig fehlerfrei.
> Umrechen in binär ist Unsinn.
Natürlich ist das kein Unsinn, sonst hätte ich es ja nicht gemacht.
Wenn man von Binärzahlen die Differenz bildet, ist sie immer richtig,
auch bei einem Überlauf. Damit habe ich also Richtung und Schrittweite
der Änderung und kann sie bequem zu dem alten Zählerstand addieren.
Und das trifft auf Graycode eben nicht zu. Daher ist die Umwandlung
notwendig. Oder ich bräuchte einen erheblich aufwendigeren Code mit
Tabelle oder vielen if/else.
Peter
@Sönke Paschko (soeni)
>Und diese Funktion rufe ich per Timer Interrupt auf?
Ja.
> wenn ja, wie oft?
Oft genug. Kommt drauf an wie schnell dein User den Knopf drehen kann.
Wenn wir mal von 10 U/s ausgehen (schon SEHR schnell), macht das 240
Codes/s. D.h. du musst mit mind. 240 Hz abtasten, besser mehr.
>PS: wenn mein verwendeter Code falsch ist, kann dieser doch aus dem>Tutorial Drehimpulsgeber gelöscht werden oder?
Ich durschaue den Trick der Routine im Moment nicht so ganz. Aber sie
richt mir verdächtig nach Sparvariante. Solide ist auf jeden Fall die
Auswertung als Graycode, wie im DSE FAQ angegeben.
MFG
Falk
Danke für die Antwort, werds gleich ausprobieren. Leider Meckert der
Compiler bei BIT_CHAR tabindex; Ich hab mit Tabellen noch nie
gearbeitet, muss man da noch ne Headerdatei einbinden??
Sönke Paschko wrote:
> enc_delta müsste eigentlich schon das Richtige liefern, aber weit> gefehlt. Meist werden bis zu 5 Impulse pro Rastung losgelassen. (Laut> Reichelt soll ich einen Encoder mit 24/24 haben, also eine Rastung = ein> Impuls).
Wie wertest Du denn enc_delta aus?
Du mußt es atomar auslesen und löschen, d.h. unter Interruptsperre.
Wenn Du es willkürlich rücksetzt, funktioniert die Entprellung nicht
mehr.
Peter
zu meinem jetzigen Code, wenn ich die Richtung nicht erfasse (mit meinem
Rücksezten), wird unaufhörlich in eine Richtung gezählt.
Nüzt es was, wenn ich den gesamten Code poste?? sind mehrere Seiten.
Zum anderen Code, benötigt BIT_CHAR tabindex; irgenwas?? Mein Compiler
meckert da immer rum und spuckt Fehler.
Falk Brunner wrote:
> Ich durschaue den Trick der Routine im Moment nicht so ganz. Aber sie> richt mir verdächtig nach Sparvariante.
Sie riecht nicht nur so, sie spart wirklich Zeit und Code gegenüber
anderen Versionen.
Woran sie allerdings nicht spart, ist an Funktionalität.
Da ein 2Bit-Graycode nur aus 4 Zuständen besteht, kann man das leicht
nachprüfen.
Der Mehraufwand der Tabellenmethode kommt dadurch zustande, daß sie mehr
Register benötigt (16Bit Indexberechnung), die der Interrupthandler
zusätzlich PUSHen/POPen muß.
> Solide ist auf jeden Fall die> Auswertung als Graycode, wie im DSE FAQ angegeben.
Aber nicht solider als meine Version.
Peter
Sönke Paschko wrote:
> So jezt geht garnix mehr.
Warum wohl überrascht mich das überhaupt nicht?
Ein Programmierer kann den Fehlern nicht davonlaufen, er muß sie finden.
Gib doch einfach mal die Pins wieder auf LEDs aus und drehe langsam, ob
alle 4 Phasen zu sehen sind.
Viele Leute schließen die Encoder einfach nur falsch an.
> Ich poste mal den Code:
Dann aber als Anhang und nicht scheibchenweise, sondern so, daß die
Funktion auch compilierbar ist.
Peter
@ Peter Dannegger (peda)
>> Solide ist auf jeden Fall die>> Auswertung als Graycode, wie im DSE FAQ angegeben.>Aber nicht solider als meine Version.
OK, du hast Recht. Ich hab mir die Routine nochmal in Ruhe angesehen,
sollte wasserdicht sein. Clever gemacht!
MFg
Falk
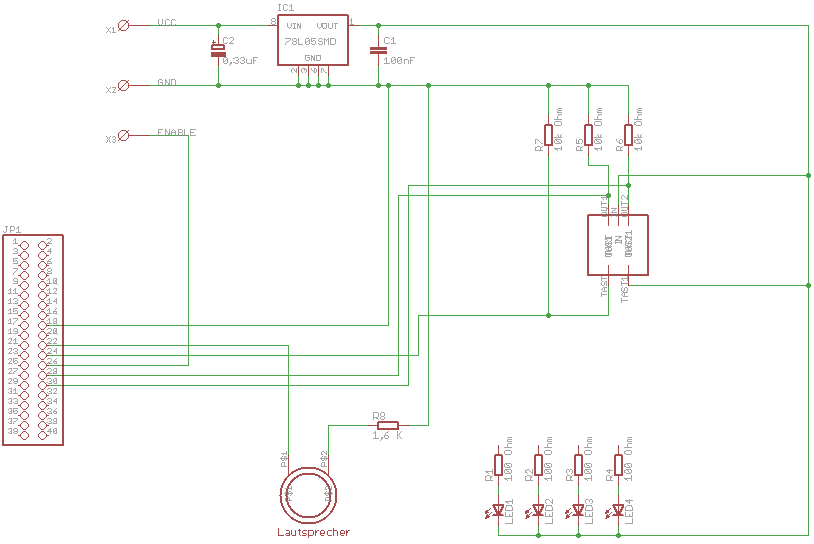
Tut mir leid, aber ich komm gerade garnicht klar. Ich hab das besagte
Problem, dass mein Encoder nicht funktioniert. Den zugehörigen Code hab
ich gepostet, ebenso die Schaltung. Die beiden Pins des Encoders gehen
auf Interruptpins des atmega128. Wenn es notwendig ist, kann ich den
gesammten Code posten, leider ist der aber ziemlich groß und würde
meiner Meinung nach nur verwirren.
Also wass kann ich nun tun, um das Problem zu beheben?
Zum Test mit den LEDs, wie soll das gehen, da sieht man doch nichts,
dass ist doch zu schnell.
@ Sönke Paschko (soeni)
>ich gepostet, ebenso die Schaltung. Die beiden Pins des Encoders gehen>auf Interruptpins des atmega128.
Ist unnötig, geht mit jedem X-beliebigen Pin.
>gesammten Code posten, leider ist der aber ziemlich groß und würde>meiner Meinung nach nur verwirren.
Na hoffentlich verwirrt er dich nicht ;-)
>Also wass kann ich nun tun, um das Problem zu beheben?>Zum Test mit den LEDs, wie soll das gehen, da sieht man doch nichts,>dass ist doch zu schnell.
Das geht doch nicht ! Das geht doch nicht ! Das geht doch nicht ! Das
geht doch nicht ! Das geht doch nicht ! Das geht doch nicht ! Das geht
doch nicht ! Das geht doch nicht ! Das geht doch nicht ! Das geht doch
nicht ! Das geht doch nicht ! Das geht doch nicht !
Bleib mal ruhig.
Schleisse an zwei freie Pins über 1KOhm zwei LEDs an. Die IOs
logischerweise als Ausgang definieren. Dann kopierst du in einer
Endlosschleife zu Testzwecken deine beiden Eingangspins vom Encoder auf
die LEDs. Wenn du nun den Encoder festhaälst und langsam drehst dann
solltest du die Codes in der entsprechenden Reihenfolge sehen, wei im
Artikel Drehgebr zu sehen. Wenn nicht, hast du dort schonmal ein
Problem.
Wenn das klappt, dann mach die Kopieraktion im Timer-Interrupt. Wenn das
dann auch klappt nutze die Routine aus dem link und es sollte gehen.
MFG
Falk
Ich habe vor ein paar Monaten Peter's Drehgeber Codebeispiel auf einem
PIC
adaptiert. und es funktioniert absolut einwandfrei. Ich kann den
Drehgeber mit der Hand so schnell drehen wie ich nur kann und es sind
bis jetzt noch nie Schritte verlorengegangen. Ich bin sehr zufrieden mit
der Leistung und Zuverlaessigkeit. Ich verwende diese Funktion fuer die
Frequenzeinstellung eines Amateurfunkgeraets.
Habe ueberigens den Code auf fuenf Drehgeber und 16-Bit ausgebaut und
alle Kanele funktionieren 100%.
Sogar mit billigen mechanischen Drehgebern funktioniert das super.
Ich bin der Ansicht dass Peter's Beispielcode einfach Spitzenklasse ist
und in seiner Einfachkeit und Zuverlaesigkeit nicht leicht zu
uebertreffen ist.
Nochmals vielen Dank an Peter.
Gruss,
Gerhard
> Ich habe vor ein paar Monaten Peter's Drehgeber Codebeispiel auf einem PIC> adaptiert. und es funktioniert absolut einwandfrei. Ich kann den Drehgeber> mit der Hand so schnell drehen wie ich nur kann und es sind bis jetzt noch> nie Schritte verlorengegangen. Ich bin sehr zufrieden mit der Leistung und> Zuverlaessigkeit.> Ich bin der Ansicht dass Peter's Beispielcode einfach Spitzenklasse ist und> in seiner Einfachkeit und Zuverlaesigkeit nicht leicht zu uebertreffen ist.> Nochmals vielen Dank an Peter.
Dasselbe hier - allerdings nicht auf einem PIC, sondern einem
TMS320F2812...
"enc_delta müsste eigentlich schon das Richtige liefern, aber weit
gefehlt. Meist werden bis zu 5 Impulse pro Rastung losgelassen. (Laut
Reichelt soll ich einen Encoder mit 24/24 haben, also eine Rastung = ein
Impuls)."
Ich errinnerte mich daran, dass ich auch einen mechanischen Drehgeber
besitze welcher pro Rastung 2 Pulse liefert. Die sind aus irgendeinen
Grund so gebaut nehme ich an. Bevor man dem Micro die Schuld gibt sollte
man nach Moeglichkeit die Hardware testen (Speicheroszi) und den
Drehgeber mal auf den Puls zu fuehlen. Auf dem Oszu muessen die
Rechtecksignale beim Drehen schoen gleichmaesig aussehen (Bei konstanter
Geschwindigkeit ca. 50% Impulsverhaeltnis)
Ein Bekannter von mir hatte jede Menge Schwierigkeiten mit bestimmten
Drehgebern von Digi-Key. Die lieferten alles andere als Graycode und
waren meiner Ansicht nach defekt.
Die Moral von der Geschicht: Kenne Deinen Hardware genau: -)
Gruss,
Gerhard
> Du weißt aber, dass der F2812 nen Hardware Quadratur Encoder drin hat?
Ja - der bringt aber nur was wenn der Hardware-Entwickler das auch
berücksichtigt und die Encoder nicht an irgendwelche GPIOs anschließt...
Michael K. wrote:
>> Du weißt aber, dass der F2812 nen Hardware Quadratur Encoder drin hat?> Ja - der bringt aber nur was wenn der Hardware-Entwickler das auch> berücksichtigt und die Encoder nicht an irgendwelche GPIOs anschließt...> Ich war nur für die SW zuständig.
Schlag in den Nacken dann gehts beim nächsten Mal.
Also ich hab nochmal gaaaanz von forne angefangen.jezt hängt nix anderes
mehr dran außer nem LCD einem Port per Dioden ausgeführt und dem
Encoder. als Pins benutze ich PortB Pin 0 und 1 nun, da ich keine
Interruptpins mehr nehme geht garnix mehr. er zappelt zwar immer, fängt
sich aber immer bei -2.
Code im Anhang
@ Sönke Paschko (soeni)
Sag mal, bist du so lernresistent oder tust du nur so?
Wenn du sämtliche Hinweis immer so galant ignorierst, dann frag nicht
nochmal nach!
Mann O Mann.
welche Hinweise denn? ich habe das mit den Dioden ausprobiert. man kann
in jedem Fall sehen, das die Zustände richtig aufgefasst werden. Das mit
dem Einpendeln hab ich gelöst, da war nen fehler, jezt "funktioniert" es
genauso wie vorher mit vielen Sprüngen.
Was hab ich den für Hinweise überhöhrt??
@ Sönke Paschko (soeni)
>welche Hinweise denn?
u.a. diese
Beitrag "Re: Encoder macht zu viele Schritte"> ich habe das mit den Dioden ausprobiert. man kann>in jedem Fall sehen, das die Zustände richtig aufgefasst werden.
Das hast du aber nicht geschrieben!
> Das mit>dem Einpendeln hab ich gelöst, da war nen fehler, jezt "funktioniert" es>genauso wie vorher mit vielen Sprüngen.
Quelltext?
Mfg
Falk
Sorry mein Fehler. Versteht mich nicht falsch, ich Find es gut, dass man
hier Hilfe bekommt. Quelltext ist der Gleiche wie oben nur mit anderen
Pins.
Nochmal im Anhang
Also ich würd´s noch einfacher machen:
PHASE_A--> auf Interrupt-Pin legen
PHASE_B--> auf Port-Pin legen
int enc=0; // Variable für Encoderwert
// Interruptroutine
get_enc {
if (PHASE_B ==1) enc++;
else enc--;
_waitms(was weiss ich wie lange, zum Entprellen);// Warteschleife
}
Funktion:
Wenn auf Phase A ein Impuls erkannt wird
schaue ich ob Phase B positiv oder negativ ist und zähle dann rauf oder
runter.
Wenn man sich die zwei Phasen A und B mal aufmalt, merkt man was. Hab
selbst relativ lange gebraucht, um das zu checken, aber es geht!
Ansonsten gibt es noch die Alternative bei US Digital, die haben einen
Chip im SO8 für wenig Geld, der macht die Decodierung in Hardware, dann
bekommt man ein Signal für Takt und eines für die Richtung, dann gehts
noch einfacher....
http://www.altron.de/_pdf/ddm/427z1.pdf
auf der letzten seite sind beide möglichkeiten der auswertung als
sinnfließbild dargestellt. die linke dürfte recht genau peters variante
sein, wenn ich das auf die schnelle erkannt habe. vielleicht hilft dir
das, den code zu verstehen und den fehler zu finden.
den weg über den externen interrupt kannst du dir aber eigentlich
sparen, weil peters code wirklich klasse funktioniert.
@ Frank B. (frankman)
>Also ich würd´s noch einfacher machen:>PHASE_A--> auf Interrupt-Pin legen>PHASE_B--> auf Port-Pin legen
Das sollte man nicht machen. Wieso?
Siehe Drehgeber.
>Ansonsten gibt es noch die Alternative bei US Digital, die haben einen>Chip im SO8 für wenig Geld, der macht die Decodierung in Hardware,
Wenn er das nicht debuggt bekommt, kann er auch gleich das Hobby
wechseln.
MFG
Falk
Frank B. wrote:
> // Interruptroutine> ...> _waitms(was weiss ich wie lange, zum Entprellen);// Warteschleife
Ich vermute, Du programmierst noch nicht sehr lange bzw. nicht sehr
erfolgreich.
Die UART wird Dir dabei hoffnungslos überlaufen, Timer werden nach dem
Mond gehen, Software-PWM kannste vergessen usw.
Warum willst Du absichtlich einen MC auf die Leistung eines
Relais-Rechners abbremsen?
Interrupts mit _waitms sind schlichtweg verboten !!!
Peter
AAAAAAAAAAAAAAAAAAAAAAAaarggg. Da ist irgendwie sowas von der Wurm drin.
Ich hab nochmal ganz von forne angefangen. Neuer Controller, neue
Hardware.
Ich benutze jezt einen atmega8515 mit der Pheripherie des STK500.
Hierbei nutze ich die Dioden und die Eingänge für den Encoder.
Schaltplan im Anhang
Hier der Code
1
//################### Includes ###################
@Sönke Paschko (soeni)
>AAAAAAAAAAAAAAAAAAAAAAAaarggg. Da ist irgendwie sowas von der Wurm drin
Kann sein.
>Ich hab nochmal ganz von forne angefangen. Neuer Controller, neue>Hardware.
Neues Glück ;-)
>Ich benutze jezt einen atmega8515 mit der Pheripherie des STK500.>Hierbei nutze ich die Dioden und die Eingänge für den Encoder.
Welche Dioden? Ach so, LEDs! Dann SAG DAS AUCH SO!
>Schaltplan im Anhang
Deine Pull-Downs müssen doch eher Pull-Ups sein, oder?
Oder ist VTG die Betriebsspannung? Kann man machen, ist aber eher
unüblich.
Und wie reagiert dein Aufbau?
MFg
Falk
Er reagiert garnicht.
VTG ist Betriebsspannung wie sollte es denn sonst realisiert werden??
ich kann leider keine Beispielbeschaltung finden.
Auch den LED Test habe ich gemacht, hier werden die Zustände auch wieder
einwandfrei Abgebildet. Auch in der Timerinterruptrutine.
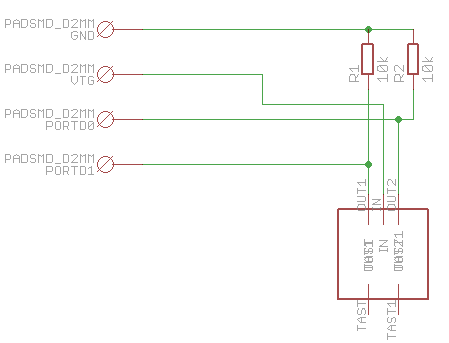
Hi
Aus deine Schaltung ist der Anschluss (VCC/GND) nicht so richtig zu
erkennen.
Schliess doch mal den Decoder wie im angehängten Datenblatt an. Dann
hast du wenigstens eine kleine Hardwareentprellung.
MfG Spess
Danke hab ich gemacht. Gleiches Bild wie ebend. Da die Phasen doch
erkannt werden, muss doch die Software falsch sein oder? ich meiner da
blinkt lediglich die erste LED, der Zählt noch nichtmal irgendwie. sind
denn meine Phasen korekt??
der enkoder ist falsch angeschlossen. schau doch mal ins datenblatt. der
soll nach masse schalten, was auch recht viel mehr sinn macht, wenn du
pullUPs verbaust.
du kannst das ganze auch andersrum aufbaun, dann aber konsequent mit
pull-downs.
@Sönke Paschko (soeni)
>Danke hab ich gemacht. Gleiches Bild wie ebend. Da die Phasen doch>erkannt werden,
Werden sie das? Blinke abwechselnd die LEDs, wenn du die Phasen direkt
auf die LEDs kopierst?
> muss doch die Software falsch sein oder?
Ich seh erstmal keinen Fehler.
> ich meiner da blinkt lediglich die erste LED,
Klingt fast so, als ob eine Phase nicht erkannt wird.
MFG
Falk
#define PHASE_A (PIND & 1<<PIND0) // PINC.0 für Interrupt Encoder
14
#define PHASE_B (PIND & 1<<PIND2) // PINC.1 für Interrupt Encoder
15
16
17
volatilecharenc_delta=0;// -128 ... 127
18
19
20
21
22
intmain(){
23
24
25
26
DDRB=0xFF;// Port A als Ausgang setzen (LED)
27
DDRD=0x00;// Port B als Eingang setzen
28
29
30
TCCR0=1<<CS01;//divide by 8 * 256
31
TIMSK=1<<TOIE0;//enable timer interrupt
32
33
sei();
34
35
36
37
while(1){
38
39
// PORTB = enc_delta;
40
// PORTB = PIND; // Ausgabe LED
41
}
42
43
44
return0;
45
}
46
47
48
49
50
51
52
53
54
SIGNAL(SIG_OVERFLOW0)
55
{
56
staticcharenc_last=0x01;
57
chari=0;
58
59
if(PHASE_A)
60
i=1;
61
62
if(PHASE_B)
63
i^=3;// convert gray to binary
64
65
i-=enc_last;// difference new - last
66
67
if(i&1){// bit 0 = value (1)
68
enc_last+=i;// store new as next last
69
70
enc_delta+=(i&2)-1;// bit 1 = direction (+/-)
71
}
72
73
PORTB=PIND;// Ausgabe LED
74
}
Dann kann ich die Phasen ablesen. (Hardware ist wie im Datenblatt
beschrieben umgesetzt auf einem Steckbrett)
wenn ich mir die Zahl in enc_delta auf den Port ausgeben lassen will
(Anzeige über LED) nehme ich folgenden Code:
1
//################### Includes ###################
Hi
Bin zwar kein C-Programmierer, aber irgendwie sehe ich nicht wie du
einen Zustandswechsel erkennen willst. Da fehlt mir irgendwie eine
globale Variable mit dem letzten Zustand.
MfG Spess
das macht die deklaration mit static in der ISR.
ich bin trotzdem noch der meinung, dass die hardware falsch
angeschlossen ist und eine seite aus zufall funktioniert.
@ spess53 (Gast)
>einen Zustandswechsel erkennen willst. Da fehlt mir irgendwie eine>globale Variable mit dem letzten Zustand.
Nöö, static char enc_last = 0x01;
@Sönke Paschko (soeni)
>Also wenn ich folgenden Code nehme:
schnipp schnapp
> while(1){>> // PORTB = enc_delta;> // PORTB = PIND; // Ausgabe LED> }
Mit diesem Code siehst du GAR NICHTS! Wenn doch, hast du einen
Verdrahtungsfehler!
MFG
Falk
Hi
>ich bin trotzdem noch der meinung, dass die hardware falsch>angeschlossen ist und eine seite aus zufall funktioniert.
Dann mach doch einfach ein kleines Programm, mit dem du den Zustand am
Eingangsport auf deine Leds ausgibst.
MfG Spess
hat jemand vielleicht ne schaltung mit nem atmega (erstmal egal welcher)
mit einem Encoder, die er Mir samt funktionierendem Programm zur
Verfügung stellen kann?? ich habe, was Schaltungen angeht eigentlich
garnix gefunden.
Wenn Peters Lauflicht funktioniert, dann ist die Beschaltung doch
schonmal richtig. Nun analysiere Peters Code und ändere ihn auf Deine
eigenen Bedürfnisse ab. Einfacher kannst Du nicht zum Ziel kommen...
KH
Ich habe den Eindruck dass man oft vielleicht versucht zu Vieles auf
einmal zum funktionieren zu bekommen. Bei Mikrocontrollers kommen dann
noch die Probleme der Firmware dazu. Deshalb denke ich dass man
vielleicht ganz einfach etwas methodischer vorgehen soll. Hardware und
Firmware gleichzeitig Fehler suchen zu muesen ist zuviel verlangt.
Auch sollte man niemals annehmen dass die Hardware notwendigerweise
funktioniert. Deshalb zuerst mit entsprechenden Messmitteln (Oszi, Logic
Probe, LEDs usw.) feststellen ob z.B. der Drehgeber die richtigen
Ausgangssignale erzeugt. (Es gibt schadhafte neue D.G. wie ein Bekannter
von mir festellen musste). Beim Drehen muessen die A/B Ausgangsleitungen
entsprechend nach Datenblatt umschalten.
Dann vergewissern ob die Mikro Portleitungen tatsaechlich als Eingaenge
konfiguriert sind und nachpruefen (LED,Oszi..). Dann wuerde ich in der
main loop ein ganz kurzes Programm erstellen welches die LEDS als Echo
an zwei anderen Portleitungen mit LEDS (oder Oszi) ausgibt. Jetzt weiss
man dass die H.W. richtig funktioniert. Als naechstes wurde ich dann die
Timer Interrupt Routine einfuegen und einen Port Pin damit steuern,
damit man weiss dass der Timer Interrupt richtig funktioniert.
Dann....
Also schrittweise vorgehen damit man nichts Wichtiges uebersieht. Jeder
wird warscheinlich seine eigene Methode haben.
Haltet mich bitte nicht altmodisch, aber so eine Vorgehensweise hat sich
bei mir zumindestens oft gelohnt um am Ende schneller ans Ziel zu
kommen.
Damals hat bei mir Peter's Drehgeber Algorithm bei meiner Anpassung zu
einem PIC innerhalb einer Viertelstunde funktioniert.
Gruss,
Gerhard
P.S. Bitte jetzt keine Steine werfen - dass tut weh ; -)
> Bitte jetzt keine Steine werfen
Warum sollten man??
Ist doch soweit alles richtig, was Du da schreibst. Das könnte nur noch
durch den Satz ergänzt werden, dass man versuchen soll, zu verstehen,
was man tut. Aber auch das hat mit der von Dir erwähnten systematischen
Vorgehensweise zu tun.
KH
Nach einem erneuten schrittweiisem Aufbau muss ich feststellen, dass das
Datenblatt von Reichelt leider falsch sein muss. Pro Rastung werden nun
4 Schritte hochgezählt, anstatt der von Reichelt angegebenen 1 Schritt
pro Rastung. Nun muss ich das nur durch 4 teilen und schon ist alles
ok.
Danke für eure Hilfe
Ich moechte uebriegenes noch den Einsatz (Anschaffung) einer Logic Probe
waermstens empfehlen. Wenn man gerade keinen Osczi zur Verfuegung hat
ist es extrem nuetzlich da man sofort sehen kann ob:
Port Eingaenge offen sind (als Eingang oder Ausgang geschaltet)
Statischer Zustand von Port Pins (High/Low)
Impulsverhaeltnis und Groessenordnung von aktiven Ausgaengen.
Wenn z.B. ein Ausgang mit PWM getaktet ist, sieht man durch die
Helligkeit des LEDs sofort in welchem Bereich die PWM gerade ist.
Nur bei seriellen Datenuebertragungsproblemen ist die L.P. nur begrenzt
nuetzlich, obwohl man schoen sehen kann ob z.B. das CS entsprechend
pulsiert, und Datenaktivaet periodisch festzustellen ist.
Ist oft auch weniger Arbeit als LEDs an die Schaltung anzuschliessen und
auch bei SMD kommt man sehr gut an die IC Anschluesse ran.
Ich kaufte mir vor vielen Jahren die "LP1" von SCS. Ich glaube die gibt
es noch.
Jedenfalls hat sich meine L.P. bei mir schon viele Jahre bei der
Fehlersuche vieler Schaltungen sehr bewaehrt. Mit gezielten
Debugbefehlen in der FW kann man viel Einsicht in das Verhalten der
Sache bekommen. Ein (Digitaler Speicher) Oszi ist eine feine Sache, aber
oft fuer Viele am Anfang der Laufbahn unerschwinglich. (Mir ging es
zumnindestens so).
Wenn man es sich leisten kann, ein USB Logicanalyzer wie der LA1034A ist
eine feine Sache fuer den Preis und dekodiert auch I2C, SPI, UART Daten.
Wenn ma den einmal hat will man es nicht mehr vermissen.
Gruss,
Gerhard
> Nach einem erneuten schrittweiisem Aufbau muss ich feststellen, dass das> Datenblatt von Reichelt leider falsch sein muss. Pro Rastung werden nun> 4 Schritte hochgezählt, anstatt der von Reichelt angegebenen 1 Schritt> pro Rastung. Nun muss ich das nur durch 4 teilen und schon ist alles> ok.
Ich würde mal behaupten das Datenblatt ist richtig. Es steht zumindest
drin, dass pro Rastung 4 Schritte gemacht werden...
ich poste hier noch mal die HARDWARELÖSUNG, die funktioniert wenigstens
sofort... :-)
http://www.usdigital.com/assets/general/111_lfls7084-s_datasheet_1.pdf
Und kostet nur 3,2 Dollar....
@Falk: Ich stimme Dir zu, die Lösung von mir ist nicht die beste, aber
einfach.... für den Anfang...
@ Gerd B. (Firma siliCAT.de) (silicat) Benutzerseite
>Das ist in Ordnung. 1 mechanischer Schritt sind immer 4 elektrische.
Wo steht das? Das kann und macht jeder Hersteller nach Belieben.
@ Gerhard. (Gast)
>Ich moechte uebriegenes noch den Einsatz (Anschaffung) einer Logic Probe>waermstens empfehlen. Wenn man gerade keinen Osczi zur Verfuegung hat>ist es extrem nuetzlich da man sofort sehen kann ob:
Genau. Und für unsere Hobbybastler kann man das sogar selber bauen.
http://www.geocities.com/Jacquesmartini/digital/logiktester/logiktester.html
MFg
Falk
>> Prima Link, aber der Link zum Schaltplan funktioniert nicht, womit der>> Link wertlos wird...>Bei mir funktioniert es...
Bei mir funktioniert es inzwischen auch, denn Falk hat den Fehler ja
behoben, wofür ich ihm im Namen der Nachnutzer (Ich verfüge bereits über
einen Logiktester) herzlich danke.
KH