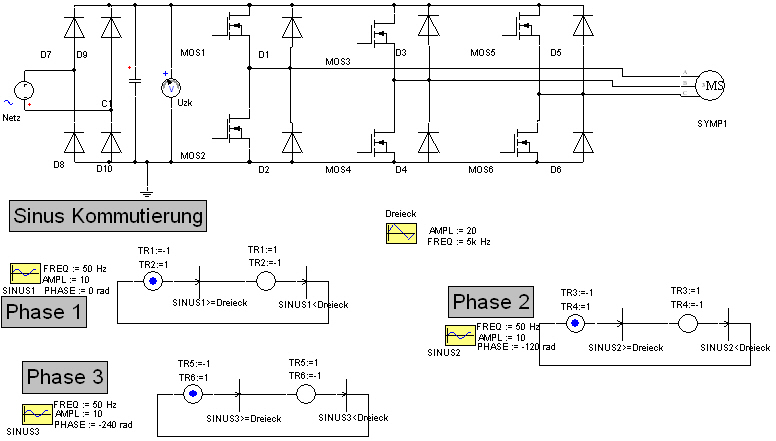
Hallo, ich bin mommentan dabei eine Simulation eines BLDC Motors durchzuführen. Das ganze soll praktisch mit Hallsensoren aufgebaut werden und mit Sinuskommutierung arbeiten. Die Ansteuersignale für die Mosfets werden von den 3 Zustandsautomaten generiert. Da bin ich mir schon unsicher, ob ich das korrekt mache. Das Dreiecksträgersignal hat eine Frequenz von 5kHz (Ist das die PWM-Frequenz?) Die Sinüsse haben jeweils 50 Hz. Der Modulationsgrad müsste ja Amplitude des Sinus geteilt durch Amplitude des Dreiecks (0,5) sein. Jetzt möchte ich aber sensorgesteuert arbeiten, d.h. ich müsste die Steuersignale abhängig von der Rotorstellung zünden. Ich habe in der Bibliothek keinen passenden Block gefunden, der wie ein Hallsensor einzusetzen wäre. Hat jemand schon Erfahrung mit sowas gesammelt und könnte mir da paar Tipps geben? Danke MFG
Angehängte Dateien:
-

Sim.png
44 KB
Also ich denke ich muss für die Ansteuerung, die Rotorlage (Parameter der SM) hernehmen und keine Hallsensoren (gibts in Simplorer nicht). Da gibt es zum einen Rotorlage elektrisch und Rotorlage mechanisch (elektr. = 2 x mech. Wie kommt das?). Jetzt wenn die Maschine steht und der Rotorwinkel 0° hat, welche Phase muss ich dann zuerst bestromen, kann mir das momentan überhaupt nicht vorstellen. Danke
Der mech. Rotorwinkel hängt mit dem elektrischen folgendermaßen zusammen: θ ele. = θ mech. * Polpaarzahl und diese ist bei mir 2
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.