Hallo Forum, Einer meiner Freunde ist ein begeisterter Modellflieger. Wir streiten bereits einige Zeit darüber wie hoch er mit einem elektrischen angetriebenen Motorsegler maximal steigen kann. Nun zu meiner Frage: Wie kann man messen wie hoch ein Modellflugzeug gerade fliegt? Dank
GPS oder Luftdruck fallen mir da Spontan ein, Lufdruck ist vermutlich genauer.
grob: Luftdruck genau: Luftdruck + gps + was echolot-ähnliches
Der Luftdruckmesser SCP1000 kann auf 20cm Höhe genau messen.
>genau: Luftdruck + gps + was echolot-ähnliches
+/- 30m :)
An Luftdruck hab' ich auch schon gedacht. So in der Art: Im Flugzeug: Drucksensor (MPX21*) AD-Wandler (ADS11*) Controller (AVR, PIC ...) ZigBee Am Boden: ZigBee PC-RS232 Auswertprogramm Ich stell es mir aber schwierig vor das zu kalibrieren. Da spielt dann der aktuelle Luftruck, Temperatur und sonst was eine Rolle.
Hi Flieger, das sollte doch hinreichend genau sein. Wenn mans genauer haben will wirds richtig teuer. (Laser - Entfernungsmessung, stabilisiert auf einen Punkt auf der Kugel. -> Lageregelung Flieger)
Wieso wird das mit Luftdruck kompliziert. Am boden messen und damit Nullen, In die Stratosphäre wird er mit seinem Teil schon nicht kommen :)
Ich hab mir eben mal den SCP1000 grob an geguckt. Interessantes Teil. Die Strecke Sensor-AD-Wandler komplett in einem Baustein. Das nimmt mir schon mal das Problem ab, das Gespann Sensor ADC zu kalibrieren. Zur Genauigkeit: Auf 5 Meter kommt's nicht an. Aber bei +-20m liegt dann schon der Benchmark. Wie ist denn das mit dem Luftdruck. Der nimmt mit der Höhe ab klar. Aber wie viel? Und welche Auswirkungen haben: Sonneneinstrahlung Luftdruck am Boden, Luftfeuchtigkeit Temperatur Ozonkonzentration und was sich sonst noch so in der Luft befindet? Alles irrelevant?
Hi Henry, imchen schreibt nichts über die Auflösung bzw Genauigkeit. Ich glaube nur mit den GPS-Daten (für Otto den Normalverbraucher), ist eine Höhenmessung für die Anwendung zu ungenau! Was spricht gegen eine reine Luftdruckmethode? Ich weiß, das die Luftschichten unterschiedliche Temperaturen haben (unter Wolken). Aber das sollte das "Messergebnis" nicht so stark verfälschen, wie die von der N_A_S_A augesannten Zeitsignale der GPS-Satelliten. Hab mal die Höhenangabe, über Tage, meines Händys (N6120) protokolliert. Dabei ist es zu einer Höhendiff. von +/- 30m gekommen.
> hauptproblem ist wohl :
Man muss für den Sensor am Modell einen Punkt finden, an dem beim Flug
kein Sog oder Druck durch die vorbeiströmende Luft entsteht, das dürfte
nicht so einfach sein.
>Wir streiten >bereits einige Zeit darüber wie hoch er mit einem elektrischen >angetriebenen Motorsegler maximal steigen kann Das wollt ihr nicht testen :-) hab ein Bericht gelesen (irgendwann in der FMT oder Modell) da sind die für Wettermessungen, mehrere 1000 Meter über Startpunkt geflogen, mit Ferngläsern auf der Nase. Das wollt ihr nicht wirklich, oder :-) Ansonsten Luftdruck oder GPS, wie schon gesagt. Ich hatte Anfangs einfach mein eTrax-GPS mit ins Modell gelegt, und Zuhause dann die Log-Daten am PC ausgelesen ! DBD Olli EDIT: zur Genauigkeit der GPS-Höhe: 99,9 % sollten für diesen Test reichen !!!
Hi peter-neu-ulm, ich dachte der Innendruck der Kabine ist halbwegs konstant! :)
Mein Freund behauptet auch über 1000m seien kein Problem. Er sprach auch von einem Artikel in einer RC-Zeitschrift. Aber ich bin eben ungläubig. Auch wenn er diesen Artikel vorgelegt hätte. Ich meine hingegen nach 250..300 Metern ist Schluss (Akku leer, Modell nicht mehr sichtbar, Fernsteuerung funktioniert nicht etc.). Das ist etwa so hoch wie der Eiffelturm. Zum Thema Luftdruck fällt mir noch was ein: Segelflugzeuge gewinnen nach dem Start ihre Höhe indem sie gekonnt aufwärts strömende Luft nutzen. Das muss in meinen Augen doch mit Luftdruckänderungen einhergehen. Wie groß sind diese Druckunterschiede? Wie berücksichtige ich das?
Der Innendruck der Kabine ist aber stark dadurch beeinflusst, an welchen Löchern an der Kabinenwandung die Luft des Modells vorbeiströmt und nur sozusagen ein Mittelwert aller zufälligen Ursachen. Die Stau-oder Sogwirkung der vorbeiströmenden Luft kann kräftig sein: Ein Loch vorn an der Kabine ergibt ein Prima Staurohr, mit dem besser die Fluggeschwindigkeit als der Luftdruck gemessen werden kann. Ein Loch an der Seite der Kabine bringt z.B. Unterdruck, je nach Strömungsgeschwindigkeit der Luft an dieser Stelle. Eine passende Stelle an der Kabinenwandung zu finden ist nicht einfach. Flughöhenmessung per Luftdruck war bis vor kurzem Standard bei der Fliegerei, deswegen wird ja auf jedem Flugplatz die Meereshöhe angegeben, zur Korrektur des Luftdruck-Höhenmessers. Dazu muss das Eingangsrohr des Höhenmessers aber an einer bewusst dafür ausgesuchten Stelle des Flugzeugs montiert sein, die frei von Druck/Sog-Wirkung vorbeiströmender Luft ist. Die ist garnicht so einfach zu finden.
>Segelflugzeuge gewinnen nach dem Start ihre Höhe indem sie gekonnt >aufwärts strömende Luft nutzen. .. das ist so! Aber die Lustdruckdifferenzen sind so klein, dass man sie getrost bei der Höhenberechnung vernachlässigen kann. Stell Dir mal ein Marmeladenglas vor, in dem Du, mit einem Bleistift von oben die Lust zusammen presst. Die Wolke am Himmel ist Dein Bleistift. Die Luft strömt sofort unter dem Bleistift wieder zusammen. Die Druckunterschiede sind mimimal. Diese "Schwankungen" sollten sich durch Intergation aus dem Messwert nahezu beseitigen lassen.
@Flieger Die Höhenmessung per Absolutdruck-Sensor ist wesentlich genauer, als mit GPS. Damit kannst bis ca. 10 cm auflösen. Pro 8 Meter Höhe wird der Luftdruck um 1 mbar kleiner. Das kann man leicht nachprüfen, indem man mal 2-3 Stockwerke die Treppe hochsteigt. Wenn Du also den Sensor am Boden die Anzeige per Tastendruck nullst und er zeigt in der Luft -10 mbar an, dann befindet sich das Modellflugzeug in einer Höhe von ca. 80 Metern. Du kannst da in Wikipedia unter allgemeine Höhenformel oder auch unter ICAO Höhenformel nachschauen und nachrechnen. Wenn es ganz genau sein muss, kann eine der Formeln in ein Programm eingebaut werden. Gruss, Bernd
> Ich meine hingegen nach > 250..300 Metern ist Schluss (Akku leer, Modell nicht mehr sichtbar, > Fernsteuerung funktioniert nicht etc.). Das ist etwa so hoch wie der > Eiffelturm. Der Eiffelturm ist pipifax. Und die Fernsteuerung arbeitet noch lange, nachdem du das Modell aufgrund der Entfernung nicht mehr siehst. Wir haben früher für einen Segelflugbewerb (die zu erzielende Flugzeit ergibt sich nach einer Formel aus der Ausklinkhöhe von der Schleppmaschine) ganz einfach eine Aembanduhr mit integrierten Höhenmesser benutzt. Die Uhr kam in den Rumpf der Schleppmaschine, vor dem Start wird genullt. Schleppmaschine schleppt auf Höhe, klinkt den Segler aus. Schleppmaschine landet, der Höhenesser in der Armbanduhr wird abgelesen und daraus die zu erfliegende Flugzeit errechnet und dem Segelpiloten mitgeteilt. Die Höhenangaben der Uhr waren auf +/- 5m genau und sahen eigentlich ziemlich realistisch aus.
So nun habe ich mir das Datenblatt vom scp1000 näher angeschaut. Leider sind über die relevanten Eigenschaften Messgenauigkeit Temperaturdrift keine Aussagen gemacht. Es wird lediglich die Auflösung angegeben. Daraus schließe ich, das scp1000 nicht direkt für ernsthafte Messaufgaben gemacht ist. Es ist immer eine erneute Kalibrierung und Messfehlerkompensation erforderlich. Heute Morgen habe ich im Internet noch ein interessantes Teils gefunden: http://www.sm-modellbau.de/shop/product_info.php?products_id=46&cPath=11 Es loggt einige Daten, unter anderem auch die Flughöhe mit und ist erschwinglich. Vielleicht löst das meine Probleme.
Nur so am Rande : Ich meine mich zu erinnern dass rechtlich vorgeschrieben ist, dass die Dinger einen bestimmte Höhe (ich glaube 150 Mtr über Grund) nicht überfliegen dürfen. Ansonsten : Es reicht eugentlich ein Luftdrucksensor + µC: einfach immer die Maximalhöhe (sollte minimaler Luftdruck-Messwert sein) ins EEPROM schreiben. Am Boden dann per RS232 auslesen.
Wenn du Angst vor der Kalibrierung eines Drucksensors hast aber über etwas mehr Geld verfügst (42-60€) kannst du dir ja mal die Drucksensoren von http://www.sensortechnics.com anschauen. Die haben teilweise digitale Schnittstellen (I2C, SPI) insbesondere: CSDX, HDI und HCE. -wiebel
Bosch Sensortec hat auch einen Luftdrucksensor mit digitaler Schnittstelle, der soll genau genug sein um wenige cm aufzulösen.
Ich hätte noch einen ganz anderen Vorschlag: -Beschleunigungssensor, pro Sekunde einen Messwert in einen Ram ablegen -das Ding fiegen lassen, nach der Landung auslesen -Messwerte plotten -Funktion durchlegen -zwei Mal über die Zeit integrieren -höchsten Punkt ablesen Gruss Daniel
Daniel R. wrote: > Ich hätte noch einen ganz anderen Vorschlag: > > -Beschleunigungssensor, pro Sekunde einen Messwert in einen Ram ablegen > -das Ding fiegen lassen, nach der Landung auslesen > -Messwerte plotten > -Funktion durchlegen > -zwei Mal über die Zeit integrieren > -höchsten Punkt ablesen -die Messwerte ansehen -heftig lachen -alles entsorgen
Ich weiss nicht, warum ihr euch Sorgen um Genauigkeit und Temperaturdrift macht. Wenn das Teil vor dem Start am Boden (Höhe Null!) auf Null gesetzt wird, könnt ihr diese Probleme vergessen. Da spielt nur die differentielle Genauigkeit und Auflösung eine Rolle.
Bensch wrote: > Ich weiss nicht, warum ihr euch Sorgen um Genauigkeit und > Temperaturdrift macht. Weil es in den Kunststoffrümpfen dieser Segler bei Sonneneinstrahlung auch schon mal ordentlich war wird. Und so ein Flug dauert üblicherweise schon etwas länger als ein paar Sekunden/Minuten
Ja gut, aber man kann das Teil auch so einbauen, dass es im Luftstrom gut gekühlt wird. Ausserdem könnte man ja auch noch die Temperatur mitloggen. Die Temperaturabhängigkeit zu messen, dürfte ja auch kein so grosses Problem sein, oder?
Es geht doch darum festzustellen, ob es eher 200-300m sind oder eher 600-1000m !?! Da reicht das billigste GPS für !!! Am ende geht da sogar was Mechanisches :-) DBD Olli PS: es wird langsam langweilig ;(
> PS: es wird langsam langweilig ;(
Macht es auch nicht besser. Wenn's dir nicht passt, geh doch einfach....
@Karl heinz Buchegger (kbuchegg) >>-die Messwerte ansehen >>-heftig lachen >>-alles entsorgen Gründe? Weil Du nicht in der Lage bist, ne Funktion dafür aufzustellen und die zu integrieren? Darüber lache ich. Die Methode funktioniert.
Daniel R. wrote: > @Karl heinz Buchegger (kbuchegg) >>>-die Messwerte ansehen >>>-heftig lachen >>>-alles entsorgen > > Gründe? > Weil Du nicht in der Lage bist, ne Funktion dafür aufzustellen und die > zu integrieren? > Darüber lache ich. Dann lach mal schön und überleg dir mal was dein Beschleunigungsmesser wohl bei jeder nicht sauber geflogenen Kurve bzw. in Böen anzeigen wird. Weist du, die Krux bei einem Flugzeug ist, dass es sich frei im 3D-Raum bewegt und kein Fahrstuhl ist. Von dem Problem, dass deine 2-malige Integration auch die winzig kleinen Messfehler extrem verstärken wird, reden wir erst mal gar nicht. > Die Methode funktioniert. Ja klar. Auf dem Papier funktioniert viel.
Zur maximal erlaubten Höhe: Ein Modell darf ohne Genehmigung so hoch fliegen bis es in den kontrollierten Luftraum eintritt, dies ist je nach Entfernung zum nächsten Flughafen bei 300m, 500m oder 750m der Fall. Für Flüge über 750m ist eine Genehmigung bei der Deutsche Flugsicherung GmbH ein zu holen. Zu den Beschleunigungs Sensoren: Karl Heinz hat absolut recht, ich habe einige Zeit mit den Beschleunigungssensoren meines Quadrocopters versucht das Ding stabil auf einer Höhe zu halten. Fazit: Nun benutze ich dafür einen Sirf-III, der ist mit +-10m wesentlich genauer sobald man die Werte mittelt und extreme Ausreißer verwirft. Zu den Luftdrucksensoren: Nachdem das GPS auf +-10m genau war hab ich da nicht weiter gebastelt, kann mir aber nicht Vorstellen das die Dinger im realen Einsatz genauer als das GPS werden (Staudruck/Sog, Wind, Lufttemperatur, etc.). Edit: Schau dir mal die GPS Genauigkeit auf http://www.kowoma.de/gps/gpsmonitor/gpsmonitor.php an und entscheide selber.
> Segelflugzeuge gewinnen nach dem Start ihre Höhe indem sie gekonnt > aufwärts strömende Luft nutzen. Das muss in meinen Augen doch mit > Luftdruckänderungen einhergehen. Nein, sondern aufgrund von Dichte-Unterschieden. Warme (und feuchte) Luft hat eine geringere Dichte, darum steigt sie auf. Der Luftdruck ist aber in der aufsteigendenen Luft der gleiche wie der Luftdruck der Luft drumherum. Wenn nun die Luft aufsteigt (Fachjorgan: "Bart"), dehnt sie sich aufgrund des abnehmenden Luftdruckes mit der Höhe aus. Wenn sich ein Gas ausdehnt, kühlt es ab. Irgendwann ist das aufgestiegene Luftpaket so kalt, dass das darin enthaltene Wasser kondensiert. Und schon hast Du eine Wolke am Himmel.
Daniel R. wrote: > @Karl heinz Buchegger (kbuchegg) >>>-die Messwerte ansehen >>>-heftig lachen >>>-alles entsorgen > > Gründe? > Weil Du nicht in der Lage bist, ne Funktion dafür aufzustellen und die > zu integrieren? > Darüber lache ich. Dann lach mal schön und überleg dir mal was dein Beschleunigungsmesser wohl bei jeder nicht sauber geflogenen Kurve bzw. in Böen anzeigen wird. Weist du, die Krux bei einem Flugzeug ist, dass es sich frei im 3D-Raum bewegt und kein Fahrstuhl ist. Von dem Problem, dass deine 2-malige Integration auch die winzig kleinen Messfehler extrem verstärken wird, reden wir erst mal gar nicht. > Die Methode funktioniert. Ja klar. Auf dem Papier funktioniert viel. Ultrakompliziertes Gedankenexperiment: Was zeigt Dein *_Beschleunigungs_*sensor denn bei einer konstanten Steigrate an ???
Mal ein paar Diagramme: http://www.kickinger.org/GPSGallery/sGPX_20070407Vortex_Track 004_2D.jpg http://www.rc-network.de/forum/attachment.php?attachmentid=78699&d=1181243099 http://www.rc-network.de/forum/showthread.php?t=68881&page=3&highlight=wintec Und noch ein Video mit eingeblendeten GPS-Daten: Spannweite ~1.3m (also eher klein) Modell war super zu sehen 'Normale' Flughöhe für kleinere Flieger ! http://rcos.codingmonkey.de/Downloads/misc/Videos/gps-flug.mpg (124MB) Bensch wrote: >> PS: es wird langsam langweilig ;( > > Macht es auch nicht besser. Wenn's dir nicht passt, geh doch einfach.... Sorry ;(, ich wusste nicht das du hier der Boss bist (watch?v=nKi1NZIh5L4)
Nur mal so als Idee - man kann die Flughöhe auch wie bei vielen Flugzeugen über ein FM-CW Radar messen. Wenn man nicht drei bzw. zwei Antennen verwenden will müsste man noch das Flugzeug während der Messung orthogonal zum Erdboden halten. Bastelaufwand sichererlich höher als beim Luftdrucksensor - Geekfaktor aber auch :) Viele Grüße, Martin L.
Karl Heiz, man hänge den Sensor an einem Faden auf. Dann ist der Flieger ein Fahrstuhl. Ich ging davon aus, dass man soweit denkt. Nach einer Regression sind die Messfehler weg (bzw. vernachlässigbar). >>Ja klar. >>Auf dem Papier funktioniert viel. Außerhalb dessen auch. >>Ultrakompliziertes Gedankenexperiment: Was zeigt Dein >>*_Beschleunigungs_*sensor denn bei einer konstanten Steigrate an ??? Beschleinigungssensoren sind Kraftmesser. Er wird G +- F/m anzeigen.
Lutz wrote: > Ultrakompliziertes Gedankenexperiment: Was zeigt Dein > *_Beschleunigungs_*sensor denn bei einer konstanten Steigrate an ??? Noch ein unkompliziertes Gedankenexperiment: In einem Looping wird der Beschleunigungssensor eine ständige erhöhte Beschleunigung in Richtung Rumpfboden registrieren. Und trotzdem ist der Flieger nach dem Looping wieder in der Ausgangshöhe.
Karl Heiz, man hänge den Sensor an einem Faden auf. Dann ist der Flieger ein Fahrstuhl. Ich ging davon aus, dass man soweit denkt. Nach einer Regression sind die Messfehler weg (bzw. vernachlässigbar). >>Ja klar. >>Auf dem Papier funktioniert viel. Außerhalb dessen auch. Also ich habe gelesen, daß das Flugzeug fliegen und nicht an einem Faden hängen soll ...
Gehen wir mal in die Krativphase über * Triangulieren mit 2 Theodoliten * In den Flieger kommt ein Lautsprecher, der auf Befehl ein akustisches Signal abgibt. Gemessen wird die Signallaufzeit zusammen mit einer Höhenwinkelmessung mit einem Winkelmesser * Kamera in den Flieger und am Boden eine Messstrecke abstecken. Auf dem Photo müsste man den Winkel unter dem die Messstrecke erscheint ermitteln können und daraus dann wieder die Höhe * Eigenbau-höhenrader find ich interessant, stell ich mir aber auch ziemlich schwer vor.
Hi Daniel, das funktioniert bei einem näherungsweise eindimensionalem System wie einer Modellrakete ganz gut und wird dort zum Teil auch gemacht (siehe z.B. http://www.aedelectronics.nl/rdas/index.htm). Bei einem Flugzeug, dass sich mehr oder weniger beliebig in 6 Freiheitsgraden (3 translatorische + 3 rotatorische) bewegen kann wird die Sache bedeutend komplexer. In diesem Fall spricht man von Trägheitsnavigation. Das erfordert dann entweder kardanisch aufgehängte mechanische Kreisel oder drei orthogonale Gyros (Drehratensensoren) in Verbindung mit 3 Beschleunigungssensoren. Die Auswertung ist dann auch keine triviale zweifache Integration mehr. Wenn du schon mal von Eulerkoordinaten oder Quaternionen gehört hast, weißt du wovon ich Rede. Andernfalls muss ich wohl Karl Heinz Recht geben. Gruß Reinhard Edit: Sorry, hätte den Thread vorher reloaden sollen.
Lutz wrote: > Karl Heiz, man hänge den Sensor an einem Faden auf. Dann ist der Flieger > ein Fahrstuhl. Ich ging davon aus, dass man soweit denkt. > Nach einer Regression sind die Messfehler weg (bzw. vernachlässigbar). Ja klar. Und dein Faden zeigt immer in Richtung Erdboden :-) Vor allem in Kurven Mann, mann, mann. Schon mal mit dem Jet in den Urlaub geflogen? Was macht der Orangensaft in seinem Glas in einer Kurve und warum ist er daher als Anzeiger für die Schräglage nicht zu gebrauchen? Sonst wärs auch einfach: Aus der Verdrehung der Wasseroberfläche in Bezug auf das Glas ermittle ich die Schräglage und damit die Drehung um die Längsachse. Die wird integriert und so kann man den Kurs mitplotten. Nette Theorie, nur funktioniert sie in der Praxis nicht :-) Im Detail: Damit du mit deinem Beschleunigungssensor überhaupt eine Chance hast, benötigst du eine absolut stabil laufende Inertialplattform (und nein: dein Faden leistet das nicht) Und selbst dann bringt dich das Messrauschen durch die 2-malige Integration um. Regression hin oder her.
Karl Heiz, man hänge den Sensor an einem Faden auf. Dann ist der Flieger ein Fahrstuhl. Ich ging davon aus, dass man soweit denkt. Nach einer Regression sind die Messfehler weg (bzw. vernachlässigbar). >>Ja klar. >>Auf dem Papier funktioniert viel. Außerhalb dessen auch. Also ich habe gelesen, daß das Flugzeug fliegen und nicht an einem Faden hängen soll ... ******************************************************* Ähem: Oben war nur der LETZTE Satz von mir. Lutz wrote: > Karl Heiz, man hänge den Sensor an einem Faden auf. Dann ist der Flieger > ein Fahrstuhl. Ich ging davon aus, dass man soweit denkt. > Nach einer Regression sind die Messfehler weg (bzw. vernachlässigbar).
Ich will keinem den Bastel- und Forschungsspass verderben, aber dennoch ganz kurz anmerken, dass es einige Varios fuer Modellflugzeuge zu kaufen gibt, die auch ganz gut funktionieren. Und nun spielt schon weiter ;-)
Nicht das Rauschen bringt einen um (wäre bei zweimaliger Differentiation ein großes Problem) aber Offset und Drift akkumulieren sich sehr schnell zu einem ordentlichen Messfehler. Zum Orangensaft gibt es ein schönes Video, auch wenn es Eistee ist: http://www.youtube.com/watch?v=9ZBcapxGHjE
Lutz wrote: > ******************************************************* > Ähem: Oben war nur der LETZTE Satz von mir. Ah, hab den vorhergehenden Post von Daniel nicht gesehen. (Verwende immer 'Antwort mit Zitat', dann passiert sowas nicht.
Reinhard R. wrote: > Zum Orangensaft gibt es ein schönes Video, auch wenn es Eistee ist: > http://www.youtube.com/watch?v=9ZBcapxGHjE Nur ein Wort: Wow
Die Integrationsmethode funktioniert schon - sogar recht genau. Das Ganze nennt sich Trägheitsnavigation (INS oder IRS) und ist in der Luftfahrt sehr gebräuchlich. Der einzige Haken: Man muß die Werte in allen 3 Achsen genau messen und die 3 Achsen immer genau zum Erdboden ausrichten. Dafür braucht man dann entweder eine mechanische Kreiselplattform oder ein elektronisches System (Strap Down System genannt, funktioniert mit Laserkreiseln) um jederzeit die Beschleunigung auf alle 3 Achsen umzurechnen. So eine mechanische Kreiselplattform ist so groß wie 2-4 Schuhkartons und wiegt rund 10-20kg. Preis: > 250.000 USD. Die Strap Down Systeme mit Laserkreiseln sind etwas kleiner und leichter aber immer noch > 100.000 USD teuer. Gruß, Marcus
Die Integration funktioniert NUR dann wenn auch Kreisel, wie Du auch geschrieben hast, verwendet werden. In einer INS/IMU werden die einzelnen Daten der Sensoren (Beschleunigungsmesser UND Drehratenmesser) fusioniert! Mit einem Beschleunigungsmesser allein kann die Lage nicht eindeutig bestimmt werden, da man die statischen (Schwerkraft) und dynamischen (beschleunigte Bewegung z.B. Kreisflug) Beschleunigungen nicht unterscheiden kann. Hier hat z.B. Karl - Heinz vollkommen Recht! Es müssen nicht gleich Laserkreisel sein ... MEMS oder Piezo reichen auch ... Meist geschieht das mit einem Kalmenfilter. Es gibt auch kleinere IMUs bzw. AHRS Systeme die deutlich billiger sind .... Die XSens kostet rund 2200 Euro und z.B. die XBOW Nav420 für knapp 18.000Eur. Beide Systeme nutzen wir hier am Institut ... Grüße, Michael
Ist ja das, was ich geschrieben habe: Für jede Achse einen Beschleunigungsmesser und das ganze kreiselstabilisiert (entweder mechanisch oder elektronisch). Ein AHRS ist aber etwas anderes (Attitude and Heading Reference system). Es liefert nur Informationen zur Lage im Raum aber keine integrierten Positionsinformationen. So etwas wird zum Beispiel im Garmin 1000 genutzt. Wenn auch die absolute Position gefragt ist, ist die Anforderungen an die Kreisel wesentlich größer, daher nutzen die IRS Systeme auch Laserkreisel. Gruß, Marcus
Mit MEMS alleine wird das nicht nicht funktionieren, spätestens nach ein paar Minuten ist dein Flugzeug durch die doppelte Integration der Fehler irgendwo im Weltraum. Das funktioniert nur in Kombination mit einem Sensor der langfristig genaue Absolutwerte liefert (-> GPS).
Mit entsprechenden Kreiseln und Beschleunigungsmessern sind diese Systeme auch ohne externe Korrektur recht genau. Die gängigen INS Systeme, die seit den 70er Jahren in Langstreckenflugzeugen verbaut sind, haben eine Genauigkeit von +/- 5nm nachdem das Flugzeug den Nordatlantik überquert hat - und das ohne zwischenzeitliche Korrektur mit Absolutwerten. Die Höhenmessung spielt allerdings bei den INS Systemen keine Rolle - das wird nach wievor barometrisch gemacht. Auch eine Höhenmessung via GPS findet in der Luftfahrt keine Anwendung als primäre Höhenreferenz. Lediglich bei Schlechtwetteranflügen (ILS CAT II/III) wird bei der Landung zusätzlich ein Radioaltimeter genutzt. Gruß, Marcus
Klar, mit Laserkreiseln oder guten mechanischen kein Problem, aber nicht mit MEMS.
Mir gefällt der ständige Vergleich zu realen Flugzeugen nicht, wenn man diesen Modellfliegern so zusieht ist das eine verdammt zappelige Angelegenheit. Wundert mich auch nicht, so eine Passagiermaschine wiegt ja auch viel mehr, der kleine Modellflieger hat ja keine Masse, die ihn stabilisieren könnte. Eine milde Brise und ein nervöser Steuerfinger lassen das eher nach nem Ritt auf der Kanonenkugel als nach einem ruhigen Flug aussehen.
>verdammt zappelige Angelegenheit
yes Sir!
da kommt GPS nicht mit!!!!
Wie wärs mit Laser vom Boden aus die Entfernung zu Messen und den Winkel über der Horizontalen. MFg
> Auch eine Höhenmessung via GPS findet in der Luftfahrt keine > Anwendung als primäre Höhenreferenz. Ja, weil eben alles in der Luftfahrt nach Druckhöhen fliegt, von ganz klein bis ganz groß. Wenn die einen nun nach GPS-Höhe fliegen, die anderen nach Druckhöhe, dann treffen sie sich unter Umständen obwohl die Höhenmesser etwas unterschiedliches anzeigen. Und wenn GPS senderseitig ausfällt, dann gibt's auch keine passende Höhe mehr mit einem Backup-GPS-Empfänger... Darum wird man in Luftfahrt wohl noch eine ganze Weile nach barometrischer Höhe fliegen.
Ne, ich würd eher sagen weil die Funktionstüchtigkeit von GPS eher von Amerikas Gnade abhängt, die können da ruck-zuck mal den Saft abdrehen. Amerikaner + NATO hat GPS-gelenkte Bomben, die Russen haben defakto kein GPS, deren Variante heisst GLONASS und funktioniert noch nicht so richtig. Die Europäer haben auch was eigenes in Planung, namentlich Galileo, allerdings nicht unter militärischer Kontrolle, dafür aber GPS-kompatibel. (= mehr Satelliten = mehr Abdeckung) Barometrische Höhenmessung funktioniert auch ohne externe Geräte und noch dazu recht simpel, alternativ kann man ja auch ein Radar benutzen, kostet aber viel mehr und fällt leichter aus, dafür knallt man aber auch nicht so leicht gegen Berge.
Ein paar Anmerkungen: Die barometrische Höhenmessung ist nicht so trivial, wie es scheint. Es gibt nämlich keinen verlässlichen Zusammenhang zwischen Höhe und Druck, da dieser stark vom Wetter abhängig ist. Damit meine ich nicht nur den Luftdruck am Boden, den man kompensieren muß, sondern auch den Verlauf des Luftdrucks mit zunehmender Höhe. Die reale Luftfahrt fliegt zwar Höhen anhand des barometrischen Luftdruckes und kompensiert für Höhen unterhalb von etwa 10.000 Fuß auch den Bodenluftdruck, jedoch wird einfach eine feste Beziehung zwischen Luftdruck und Höhe angenommen, die sog. Standardatmosphäre. Das kann man machen, weil es in der Praxis nicht wirklich relevant ist, ob ich in 3.500 Fuß oder 3.570 Fuß unterwegs bin. Alle Flugzeuge in meiner Nähe haben ja den gleichen Fehler, da ihre Höhenmesser von der gleichen Formel zur Umrechnung von Druck in Höhe ausgehen. Die preiswerten Drucksensoren (alles unter 100 Euro) sind viel zu ungenau, um damit einen luftfahrttauglichen Höhenmesser zu bauen. In einigen vorstehenden Beiträgen wird - wie oft - Auflösung und Genauigkeit durcheinandergeworfen. Ein Drucksensor, der eine Höhe auf 20cm absolute Genauigkeit messen kann, ist etwa 500g schwer und kostet einen fünfstelligen Betrag. Dem wurde nämlich im Klimaschrank mit einem Druckkalibrator die Temperaturabhängigkeit und die Nichtlinearität ausgetrieben. Dabei werden zig Koeffizienten aufgenommen und der "rohe" Ausgabewert des Sensors digital korrigiert. Da diese aufwendigen Messungen für jeden einzelnen Sensor vorgenommen werden müssen, sind sie entsprechend teuer. Die preiswerten integrierten Sensoren mit eingebauter Kompensation, wie sie in druckmessenden Armbanduhren eingebaut werden, schaffen in der Praxis wohl einige 10 Meter absolute Genauigkeit - in einem eng begrenzten Temperaturbereich zumindest. Auch diese sind ab Werk kalibriert, wenn auch aus Kostengründen mit wesentlich weniger Meßpunkten. Baut man den Sensor im Modell so ein, daß er vor großen Temperaturgradienten geschützt ist, und merkt man sich den Meßwert am Boden zur Offsetkorrektur, sollte man so einigermaßen brauchbare Werte bis einige hundert Meter bekommen. Noch ein Wort zum kontrollierten Luftraum. Dieser beginnt nicht in 300, 500 oder 750 Metern. Die Definition ist so: 1.000, 1.700 oder 2.500 Fuß über Grund, gemessen mit einem Höhenmesser in QNH-Einstellung. Welcher der drei Werte für den Standort gilt, ist einer aktuellen Luftfahrtkarte zu entnehmen. Es gibt aber auch Gebiete, in denen der kontrollierte Luftraum bis zum Boden reicht - beispielsweise in der Nähe von Verkehrsflughäfen. Diese "Schutzräume" sind in der Regel viel größer, als es sich ein Laie vorstellt.
> Flughöhenmessung per Luftdruck war bis vor kurzem Standard bei der > Fliegerei, deswegen wird ja auf jedem Flugplatz die Meereshöhe > angegeben, zur Korrektur des Luftdruck-Höhenmessers. Ist immernoch so, wird sich in absehbarer Zeit auch nicht ändern. Lediglich bei Instrumenten-Landungen wird für die letzten Meter auf ein Radarhöhenmesser als Primärsystem zurückgegriffen. > Dazu muss das > Eingangsrohr des Höhenmessers aber an einer bewusst dafür ausgesuchten > Stelle des Flugzeugs montiert sein, die frei von Druck/Sog-Wirkung > vorbeiströmender Luft ist. Die ist garnicht so einfach zu finden. Ist nicht schwierig. Man muß nur irgendeine Öffnung an einer Fläche anbringen, die senkrecht zur Flugrichtung ausgerichtet ist und deren Umgebung einigermaßen "glatt" ist. Dann misst man weder eine Sogwirkund noch die vor dem Flugzeug aufgestaute Luft. In der großen Fliegerei ist der Statikport irgendwo vorne seitlich am Rumpf, meistens im Bereich der vorderen Kabinentüren.
Pilot wrote: > Ja, weil eben alles in der Luftfahrt nach Druckhöhen fliegt, von ganz > klein bis ganz groß. Was du hier nicht nennst ist der Preis dieser Anlagen. > Darum wird man in Luftfahrt wohl noch eine ganze Weile nach > barometrischer Höhe fliegen. Solange bis man ein von Bord aus kontrolliertes System und/oder mehrere redundante Positionssysteme (GPS, GLOSNASS, GALILEO, COMPASS) mit garantierter Verfügbarkeit und Genauigkeit hat. Oder man die gesetzliche Möglichkeit bekommt das Verhältnis von Sicherheit zu Kosten neu zu bewerten...
Ein Problem ist, daß man für eine genaue Triangulation, die auch die Höhe einschließt, Satelliten in günstigeren Positionen bräuchte. Die Umlaufbahnen sind ja so ausgelegt, daß man Satelliten zwar in verschiedenen Azimutwinkeln zur Verfügung hat, aber die "Auswahl" bei der Elevation über dem Horizont ist nicht so toll. Deshalb funktioniert die "2D-Positionsbestimmung" auf der Erdoberfläche viel besser als die Höhenmessung über GPS. Bis damit die Genauigkeit der alten barometrischen Systeme verlässlich erreicht werden kann, müssten noch einige Satelliten ins All geschossen werden. Darüber hinaus bräuchte man dann überall auf der Welt Referenzstationen und ein einheitliches System, die Korrekturdaten ans Flugzeug zu übermitteln. Das braucht man nicht nur zur Erhöhung der Genauigkeit (Differential GPS), sondern auch zur Integritätsprüfung des Systems. Um daraus einen luftfahrttauglichen Höhenmesser zu machen, müsste man allerdings die zahlreichen "Single Points of failure" eliminieren. Der schlimmste davon ist der große rote Schalter beim US-Verteidigungsministerium. Warum sollte man von der bord-autonomen, zuverlässig funktionierenden, ausreichend genauen und über Jahrzehnte bewährten barometrischen Höhenmessung abweichen? Nur, weil es auf den ersten Blick nicht "elegant" erscheint? Es ist aber einfach, und einfach ist gut. Denk auch vor allem daran, daß das Höhenmeßsystem weltweit einheitlich sein muß und nicht zu kompliziert werden darf, denn schließlich ist in so einer kleinen Cessna nicht beliebig viel Platz für Antennen und Rechnerschränke. So ein einfacher barometrischer Höhenmesser ist ein kleines Plastikdöschen, kostet 500 bis 1000 Euro und braucht nur einen Schlauch zu einer Drucköffnung an der Rumpfseite.
Oliver Döring wrote: > kostet 500 bis 1000 Euro und braucht nur einen > Schlauch zu einer Drucköffnung an der Rumpfseite. Ui. Hätte nicht gedacht, dass die so teuer sind :-) Aber in deiner Antwort ist auch etwas angeklungen, was man auch noch unterstreichen sollte: Ein barometrischer Höhenmesser funktioniert auch dann noch, wenn in ganzen Bude der Strom aus irgendeinem Grund ausfällt. Und damit ist er gegenüber dem ganzen Elektronikkram unschlagbar. > Ist nicht schwierig. Man muß nur irgendeine Öffnung an einer Fläche > anbringen, die senkrecht zur Flugrichtung ausgerichtet ist und deren > Umgebung einigermaßen "glatt" ist. Hmm. Ich bezweifle nicht, das das so gemacht wird. Aber da kommt mir sofort das altertümliche Parfümfläschen in den Sinn, bei dem ein Luftstrom senkrecht zu einem Röhrchen das Parfüm aus der Flasche zieht. Müssten dann nicht diese Höhenmesser auch gegenüber der True Airspeed (um auch mal ein Fachwort das ich kenne in den Raum zu werfen :-) korrigiert sein?
> Hätte nicht gedacht, dass die so teuer sind
Für ein Instrument, dass bei -40°C bis +60°C auf Jahre exakt anzeigt,
unempfindlich gegen hohe Beschleunigungen und Erschütterungen ist,
kalibriert, verplombt, Luftfahrt zugelassen und Bauart geprüft ist, bei
der es zu jeder Schraube und Feder eine individuelle Teilenummer gibt
und bei dem der Hersteller mit hohen Schadensersatzansprüchen
konfrontiert wird, wenn das Instrument Mist angezeigt hat und Menschen
ums leben gekommen sind?
In der Praxis verwendet man meistens mindestens 2 sog. "Static ports" einen auf jeder Seite des Rumpfes um Druckunterschiede durch schiebende Fluglagen zu vermeiden. Einen Venturi Effekt gibt es nur bei einem kleinen Durchmesser, daher haben die Static Ports eine recht große Fläche. Eine Korrektur des Höhenmessers mit der Fluggeschwindigkeit (wäre hier übrigens die Indicated Airspeed) findet nicht statt, die Abweichung ist bei sauber positionierten Static ports zu vernachlässigen. Gruß, Marcus
> Für ein Instrument, dass bei -40°C bis +60°C auf Jahre exakt anzeigt -55 bis +70°C > kalibriert, verplombt, Luftfahrt zugelassen und Bauart geprüft ist Höhenmesser werden im Rahmen der jährlichen Avionik-Nachprüfung in ihrem kompletten Anzeigebereich gegen ein Referenzinstrument geprüft, die Abweichung muß in engen Grenzen liegen. Das gilt für die kleine Cessna genauso wie für den A380. > der es zu jeder Schraube und Feder eine individuelle Teilenummer gibt Beim Höhenmesser sicher nicht, diese werden ausschließlich vom Hersteller repariert oder grundüberholt. > und bei dem der Hersteller mit hohen Schadensersatzansprüchen > konfrontiert wird, wenn das Instrument Mist angezeigt hat und Menschen > ums leben gekommen sind? Naja. Eher das Gegenteil. Ein Mangel wird aufgedeckt, eine Lufttüchtigkeitsanweisung herausgegeben, der Hersteller erarbeitet eine Modifikation, der Halter des Luftfahrzeugs darf diese dann beim Hersteller kaufen. Die Preise kommen durch die geringe Stückzahl und den immensen Zulassungsaufwand zustande. Dazu kommt noch, daß jedes einzelne Stück eine komplette Prüfung aller Parameter mit dem dazugehörigen Papierkram durchlaufen muß. Davon abgesehen sind Höhenmesser feinmechanische Präzisionsinstrumente mit entsprechendem Anteil an teuer Handarbeit.
> Eine Korrektur des Höhenmessers mit der Fluggeschwindigkeit (wäre hier > übrigens die Indicated Airspeed) findet nicht statt, die Abweichung ist > bei sauber positionierten Static ports zu vernachlässigen. Nicht ganz korrekt, die Fehler der Statik- und Gesamtdruckabnahme werden im Rahmen der Flugerprobung eines neuen Flugzeugmusters ermittelt. Bei kleinen Flugzeugen gehen diese Fehler im Vergleich zu den Fehlern der Instrumente selbst unter, so daß in aller Regel keine Korrekturmaßnahmen nötig sind. Bei Airlinern, insbesondere seit der Einführung von RVSM (reduced vertical separation minimums, die Mindest-Abstände zwischen den Flughöhen sich entgegenkommender Flugzeuge werden auf die Hälfte reduziert, um die Kapazität des Luftraums zu erhöhen), sind die Genauigkeitsanforderungen an die Höhenmesseranlage höher, hier erfolgt eine Kompensation der Fehler des Statikdrucksystems digital im ohnehin vorhandenen ADC (Air Data Computer).
Galileo wurde im Hinblick auf die Einsetzbarkeit für Flugzeugnavigation entwickelt, bis hin zur Landung. Ob das Höhenmessung mit einschließt kann ich jetzt allerdings nicht sagen. > Warum sollte man von der bord-autonomen, zuverlässig funktionierenden, > ausreichend genauen und über Jahrzehnte bewährten barometrischen > Höhenmessung abweichen? Vielleicht hofft man durch genauere und zuverlässigere Navigation den Flugverkehr dichter packen zu können? Zuverlässiger, weil man im Gegensatz zum Barometer zu jedem Zeitpunkt die Qualität des Messwertes beurteilen kann. > Darüber hinaus bräuchte man dann überall auf der Welt Referenzstationen > und ein einheitliches System Referenzstationen zur Bestimmung der Bahn- und Atmosphärenparameter sind bei GPS schon Teil des Systems, ist nur die Frage wie eng man das knüpft. > sondern auch zur Integritätsprüfung des Systems. Ein unabhängiges Netz von Überwachungsstationen ist bei Galileo vorgesehen, GPS soll m.W. entsprechend erweitert werden. > denn schließlich ist in > so einer kleinen Cessna nicht beliebig viel Platz für Antennen und > Rechnerschränke. Die Zeit der Rechnerschränke ist ja nun endgültig vorbei.
Mag alles sein, aber der weltweiten Luftfahrt mal eben ein neues System aufzudrücken, ist nicht ganz ohne. Das betrifft dann ja jedes Flugzeug, vom Airliner bis zum Ultraleicht. Die GPS-Höhe ist prinzipbedingt eine andere als die Druckhöhe, man müsste sich ein völlig neues System ausdenken, oder auf irgendeine abartige Weise auf das alte System zurückrechnen. Wenn du dir überlegst, daß ein IFR-zugelassenes Einfachst-GPS mal locker 3.000 Euro kostet, mit 200 mal 100 Bildpunkten in schwarz/weiß und einer Datenbank auf proprietärer Flash-Karte, das TomTom für 89 Euro aber schon ein vielfaches an Funktionalität aufweist, dann kannst du dir ungefähr vorstellen, was ein neuartiger Satelliten-Höhenmesser mit GPS/Gallileo/GBAS-Empfänger unter Freunden wert wäre. Zwar kann man wunderschön berechnen, wie gering die Ausfallwahrscheinlichkeit eines solchen GPS-basierten Systems wäre, das nützt dir aber immer noch nichts, wenn dir im Anflug durch die Wolken zwischen den Bergen der Strom in der Bude ausfällt. Da ist der rein mechanische Baro-Höhenmesser an Zuverlässigkeit und Robustheit nicht zu überbieten. Oder wir reden vom bösen Terroristen, der sich irgendwo versteckt und seinen kräftigen Jammer auspackt. Die Umstellungen der letzten Jahre waren ja schon ein riesiges Theater mit sehr zweifelhaftem Nutzen für die Allgemeinheit: * 8,33 kHz Kanalraster im Flugfunk * Mode-S-Transponder * ELT-Pflicht für alle Luftfahrzeuge bei gleichzeitiger Abschaffung der preiswerten 121,5-MHz-ELTs Vielleicht will nicht jeder Halter einer viersitzigen Maschine jedes Jahr mehrere tausend Euro für vorgeschriebenes Equipment ausgeben, das er eigentlich nicht braucht. Von den Umrüstkosten für größeres Gerät mal ganz zu schweigen.
Hi Das ist zwar alles ganz interessant, aber was hat das mit der Flughöhe eines Modellflugzeuges zu tun? Aus meiner Erfahrung mit GPS und Drucksensoren dürfte eins von beiden, oder eine Kombination völlig ausreichend sein. MfG Spess
@Oliver: Sagt doch keiner dass jeder Sportflieger umrüsten soll. Du hast oben schon RVSM erwähnt, da wäre es auch kein Akt die Höhenermittlung per GPS zu machen, zumindest für bestimmte Zwecke (Instrumentenlandung). Wolken tun den Signalen nichts. Bei Jammern würde ich mir eher um Flugfunk-/RADAR sorgen machen, die GPS-Antenne sitzt ja auf dem Dach und schaut nach oben. Und wenn, dann fällt keine Maschine vom Himmel. @Spess: >Aus meiner Erfahrung mit GPS und Drucksensoren dürfte eins von beiden, >oder eine Kombination völlig ausreichend sein. Sehe ich auch so. Das einfachste dürfte sein, einen von den vielen fertigen GPS-Loggern mitzuschicken.
Eine fertige Lösung ist der GPS Datenlogger, eine weitere Möglichkeit wäre ein Höhenmesser mit Datenlogger für Paraglider. Das kommt aber auf die Platzverhältnisse an. Die Selbstbaulösung mit Lerneffekt wäre ein Höhenmesser/Datetenlogger mit Absolutdruck-Sensor. Falls man wirklich die Steigleistung und maximale Höhe ermitteln will, dann sollte der Höhenmesser möglichst leicht sein und einen geringen Stromverbrauch haben wegen der kleineren Batterie. Gruss, Bernd
B e r n d W. wrote: > Die Selbstbaulösung mit Lerneffekt wäre ein Höhenmesser/Datetenlogger > mit Absolutdruck-Sensor. Falls man wirklich die Steigleistung und > maximale Höhe ermitteln will, dann sollte der Höhenmesser möglichst > leicht sein und einen geringen Stromverbrauch haben wegen der kleineren > Batterie. Solche Telemetrie Lösungen gibt es für Modellflugzeuge. Einfach mal danach googeln. Die sind recht nützlich, wenn es darum geht einzelne Komponenten zu optimieren. Was mich daran stört: Hier geht es darum eine Streitfrage zu klären. D.h. der Aufwand darf nicht zu hoch sein. Für ein oder zwei Messflüge, um die ungefähre Gipfelhöhe zu ermitteln, ist das doch Overkill. Um die Streitfrage zu klären, sind es ca 150m oder doch ca 600m, braucht auch die Genauigkeit nicht sehr hoch zu sein. @Oliver Döring Da du dich anscheinend mit Fluginstrumenten gut auskennst, darf ich mal eine Frage stellen? Ich weiß, wie VOR funktioniert. Mann nehme 2 Signale: Eines, welches übere eine Rundumantenne abgestrahlt wird, das andere geht über eine Richtantenne die sich in einer bekannten Zeit einmal im Kreis dreht. Das Rundumsignal kommt immer dann, wenn die Richtantenne nach Norden zeigt. Aus dem Zeitversatz zwischen den beiden Signalen kann man die Richtung zum VOR bestimmten. Was ich aber nicht rauskriege: Wie funktioniert DME? Wird da die Abnahme der Amplitude über die Entfernung ausgewertet? Wäre das nicht fehleranfällig?
Hallo Habe jetzt nicht den kompletten thread gelesen, deshalb bitte nicht steinigen, wenn der Vorschlag bereits einmal da war. Ein Kollege von mir ist begeisterter Radler. Er hat beim radeln immer einen Gurt um zur Herzfrequenzmessung. Dieses Teil speichert die gemessene Herzfrequenz über einige Zeit. Integriert ist ein GPS-Empfänger, dessen Daten mit gespeichert werden. Er kann später am PC auf einer Karte seine gefahrene Route mit Höhenprofil und Herzfrequenz am PC "nachfahren". Frag doch mal die Radler in der Nachbarschaft Gruß JJ
Erstmal zum Thema: Ich empfehle für solche Zwecke immer den MS5534 von Intersema. Der ist ab Werk kalibriert und kann über SPI an einen AVR oder ähnliches angeschlossen werden. Zusammen mit einer Lithium-Zelle gibt das dann einen schön kompakten "Barographen". Das Ding kostet um die 30 Euro, ist also nicht ganz billig, liefert dafür aber die Höhe auf wenige zehn Meter genau. Wer es noch besser braucht, muß dann halt tiefer in die Tasche greifen. @Karl Heinz Deine VOR-Erklärung ist so nicht ganz korrekt, bei Interesse mehr dazu. DME funktioniert anders, nämlich über Laufzeitberechnung eines HF-Impulses zwischen Transceiver im Flugzeug und der Bodenstation. Das ganze findet im Frequenzbereich von 960 bis 1215 MHz statt. Es gibt eine festgelegte Paarung zwischen VOR-Frequenzen und DME-Frequenzen, so daß der Pilot nur die VOR-Frequenz einstellen muß - sobald dieses über DME verfügt, wird das automatisch mitbenutzt. Es gibt einen Abfrage- und ein Antwortkanal, welche 63 MHz auseinanderliegen. Das Flugzeug sendet ein Impulspaar auf der Abfragefrequenz, die Bodenstation antwortet ihrerseits mit einem Impulspaar auf der Antwortfrequenz, der Empfänger mißt die Laufzeit und errechnet daraus die Entfernung zur Bodenstation. Eine Korrektur über die Flughöhe erfolgt übrigens nicht, es wird die so ermittelte Schrägentfernung direkt angezeigt. Damit die Laufzeiten bei Annäherung an die Bodenstation nicht beliebig klein werden und die Genauigkeit leidet, fügt die Bodenstation zwischen Empfang einer Abfrage und senden der Antwort eine feste Pause von 50µs ein. Jetzt gibt es natürlich das Problem, das mehrere Flugzeuge gleichzeitig eine Bodenstation auf derselben Frequenz benutzen können müssen. Hier hilft man sich mit einem erstaunlich einfachen Trick: Die Empfänger in Flugzeugen fragen die Bodenstation mehrmals pro Sekunde ab, aber nicht in festen Intervallen, sondern mit von einem Pseudozufallszahlengenerator gelieferten Muster von Pausen. Der Startwert des PRNG ist bei jedem Empfänger anders, so daß auch das Abfragemuster anders ist. Der Empfänger wird nun mit Antworten auf die eigene Abfrage, aber auch mit allen anderen Antworten bombardiert. Er sucht nun seine eigenen Antworten hinaus, indem er ein Zeitfenster, zum Beispiel "60 bis 65µs nach meiner Abfrage" hin- und herschiebt und schaut, an welcher "Position" die meisten Antworten mit ungefähr gleichem Abstand zwischen Abfrage und Antwort eingehen. Damit hat er dann "seine" Antworten gefunden, der Empfänger ist "eingerastet". Da sich die Geschwindigkeit und Entfernung des Flugzeugs von der Bodenstation nicht beliebig schnell ändern kann, braucht der Empfänger ein einmal eingerastetes Zeitfenster nur noch langsam verschieben. Die Bodenstation sendet übrigens zusätzlich noch "Squitter", das heißt "zufällige" Impulse auch ohne Abfrage. Diese sind in einem Muster angeordnet, so daß man nach kräftiger Tiefpaßfilterung ein Audio-Signal erhält, welches die Station über Morsesignale identifiziert. Der Pilot kann dieses Audiosignal auf die Kopfhörer aufschalten. Um das Problem der möglichen "Überlastung" einer Station zu umgehen, überwacht die Bodenstation, wie viele Impulse sie pro Sekunde aussendet. Wird ein bestimmter Grenzwert überschritten, reduziert sie einfach ihre Sendeleistung, die weiter entfernten Flugzeuge werden so einfach ausgesperrt, während die näheren Flugzeuge nichts mitbekommen. Dieser Selbstschutz verhindert, daß ein solches Impulschaos auf der Frequenz entsteht, daß einzelne Empfänger ihre Antworten nicht mehr eindeutig identifizieren können. Dieses System ist übrigens schon seit vielen Jahrzehnten in Betrieb - es gibt noch alte Geräte, die vorwiegend mit diskreter Logik oder sauteuren ASICs aufgebaut sind! Das ist schon faszinierende Technik. Die Empfänger zeigen übrigens meistens nicht nur die Entfernung in nautischen Meilen, sondern zusätzlich "Ground Speed" (funktioniert natürlich nur, wenn man direkt auf die Station zu oder von ihr weg fliegt) und "Remaining Time to Station" an. Es gibt seit Einführung der Flächennavigation auch sogenannte "DME-Interrogators", das sind Geräte, welche über eine Datenbank aller DME-Stationen und ihrer Positionen verfügen. Sie fragen dann mehrere Stationen ab und triangulieren so direkt die Position des Flugzeugs, welche sie dann an das FMS (Flight Management System) weitergeben. Meistens werden die Positionen eines GPS-Empfängers, eines DME-Interrogators und die der Trägheitsplattform zusammengeführt, um eine sehr genaue und "robuste" Position des Flugzeugs zu haben.
Oliver Döring wrote: > Deine VOR-Erklärung ist so nicht ganz korrekt, bei Interesse mehr dazu. Interesse ist immer da! Ich denke, dass mein Gedankenmodell nicht allzuweit von der Realität entfernt ist. Aber die Details hab ich nie studiert. > DME funktioniert anders, nämlich über Laufzeitberechnung eines > HF-Impulses zwischen Transceiver im Flugzeug und der Bodenstation. > Dieses System ist übrigens schon seit vielen Jahrzehnten in Betrieb Genau aus diesem Grund kommt ich mir einfach nicht vorstellen, dass das tatsächlich über Laufzeitberechnungen gemacht wird. Ich hab ganz einfach die Ingenieure der Vor-Computer-Ära unterschätzt. Auch interessant wie die Kollisionsauflösung gemacht wird. Im Vergleich dazu ist ja der Flug zum Mond rechentechnisch ein Kinderspiel und da gibt es tatsächlich Menschen die behaupten, die damalige Rechenpower hätte nie und niemmer ausgereicht. Vielen Dank für die Erläuterungen. Ohne gute Stichworte ist es schwierig noch Erklärungen auf dieser Detailebene zu googeln.
Karl heinz Buchegger wrote: > Was mich daran stört: Hier geht es darum eine Streitfrage zu klären. > D.h. der Aufwand darf nicht zu hoch sein. Für ein oder zwei Messflüge, > um die ungefähre Gipfelhöhe zu ermitteln, ist das doch Overkill. Um die > Streitfrage zu klären, sind es ca 150m oder doch ca 600m, braucht auch > die Genauigkeit nicht sehr hoch zu sein. Es gibt auch kleine Loesungen, die haben kein Funk und kein Logging und speichern einfach nur die Maximalhoehe fuer kleines Geld. Wenn's um eine Einmalsache geht, koennte man das Problem auch optisch vom Boden aus loesen... entweder per Foto, oder sogar live Massstab...
Angehängte Dateien:
-

h_henprofil.png
23 KB
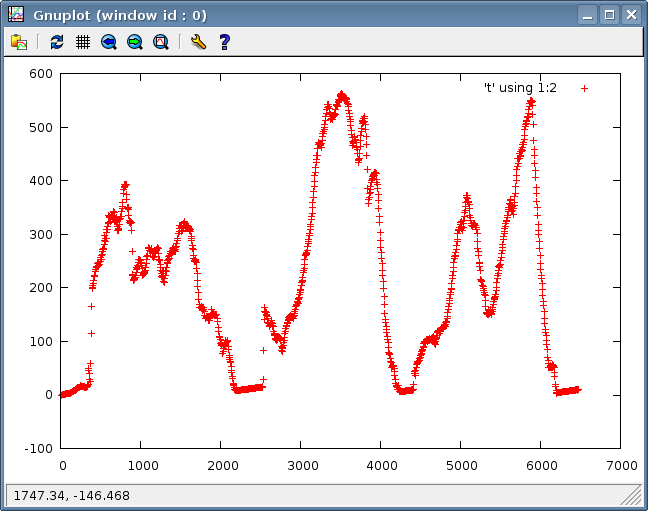
Hi, ich war am 30.03 mit meinem 1.8m Robbe Arcus ca. 550m hoch. Gemessen mit einem MPX4115 und einem LTC2400 AD Wandler. Ins EEProm schreibe ich nur 16Bit Werte. die Rohdaten folgen. Boris
Hi,
zur Auswertung nutze ich dieses kleine Perl Script:
--snip--
#!/usr/bin/perl
use strict;
my $vs=65535;
my @data;
my $time;
while(my $line=<>) {
my $raw=$line;
my $pressure=($raw/$vs+0.095)/0.009;
push(@data,$pressure)
}
my $start=($data[0]+$data[1]+$data[2]+$data[3])/4;
for my $pressure (@data) {
my $h=($start-$pressure)*82;
$time+=5;
print "$time $h\n";
}
--snip--
Das geht bestimmt genauer:)
Boris
Als Segelflieger würde ich vermuten, daß man auch mit einem Modell so hoch steigen kann, wie die Thermik eben unter Berücksichtigung des Eigensinkens reicht - warum sollte das anders sein, als bei einem großen Segler? Da sind 550m noch nicht einmal besonders viel, die manntragenden Segelflugzeuge, deren Piloten sich spätestens ab 150m im Landeanflug befinden, hätten da gerade einmal 400m Spielraum - zu wenig für ernsthafte Streckenflüge. Nur aus Interesse: Wie sieht denn die Geschwindigkeitspolare eines Modell-Segelflugzeugs mit 1,8m Spannweite aus? Was ist das geringste Sinken?
Oliver Döring wrote: > Als Segelflieger würde ich vermuten, daß man auch mit einem Modell so > hoch steigen kann, wie die Thermik eben unter Berücksichtigung des > Eigensinkens reicht - warum sollte das anders sein, als bei einem großen > Segler? Da sind 550m noch nicht einmal besonders viel, die manntragenden > Segelflugzeuge, deren Piloten sich spätestens ab 150m im Landeanflug > befinden, hätten da gerade einmal 400m Spielraum - zu wenig für > ernsthafte Streckenflüge. Da wo es für euch anfängt, wirds für uns gefährlich. Am liebsten sind mir Bärte mit 20-50m Durchmesser, da kann ich dann jederzeit aussteigen und bekomm das Modell auch wieder runter. Ab 300-400m vereinigen sich dann die Bärte und ich bekomme Probleme meinen Flieger wieder herrunter zu bekommen. > Nur aus Interesse: Wie sieht denn die Geschwindigkeitspolare eines > Modell-Segelflugzeugs mit 1,8m Spannweite aus? Was ist das geringste > Sinken? ich habe zur Zeit so eine günstige Schaumwaffel, über geringstes Sinken oder Gleitzahl denke ich da nicht nach. F3J Modelle liegen etwa bei 0,35-0,4m/s. Mehr zu dem Thema findest du hier http://www.hq-modellflug.de/ Boris
Was hat eigentlich Inertiale Navigation mit Höhenmessung zu tun? Ich glaub da ist man wohl mitten im Thema vom Thema abgekommen ;) Im Übrigen verwenden die von mikrokopter.de an ihrem Luftsensor ein Stück Schaumstoff um die Propellerwinde abzuhalten, das scheint ganz gut zu funktionieren. Eventuell ist das eine Möglichkeit irgendwelche Strömungsdrücke, am Rumpf des Flugzeuges abzuhalten.
Simon K. wrote: > Was hat eigentlich Inertiale Navigation mit Höhenmessung zu tun? Ich > glaub da ist man wohl mitten im Thema vom Thema abgekommen ;) Es ging um die Fragestellung, ob man nur mit einem Beschleunigungssensor alleine die Höhe durch Integration ermitteln kann. Ohne IN Plattform geht das nicht, weil keine Referenz existiert um die gemessene Beschleunigung vektoriell zu integrieren und die Annahme, dass ein Flugzeug immer waagrecht bzw. mit der gleichen Längsneigung fliegt, ist nun mal bei einem Modellflugzeug so gut wie überhaupt nie erfüllt.
> Im Übrigen verwenden die von mikrokopter.de an ihrem Luftsensor ein > Stück Schaumstoff um die Propellerwinde abzuhalten, das scheint ganz gut > zu funktionieren. > Eventuell ist das eine Möglichkeit irgendwelche Strömungsdrücke, am > Rumpf des Flugzeuges abzuhalten. In diesem speziellen Fall bestimmt. Allerdings wird die Öffnung des Drucksensors wahrscheinlich entweder nach oben oder nach unten zeigen, damit der zusätzliche Staudruck, wenn der Quadrokopter Fahrt macht, das Meßergebnis nicht verfälscht. Wobei bei genauerer Betrachtung bei Modellflugzeugen sogar das wahrscheinlich total egal ist. Die Geschwindigkeiten sind ja nicht so groß, die dazu gehörenden Staudrücke produzieren einen Fehler, der in der Gesamtgenauigkeit des Systems wahrscheinlich untergeht: 1 mbar (= 1 hPa) weniger Druck entsprechen in Bodennähe einer Höhenzunahme von etwas über 8 Metern. Um 1 mbar Staudruck zu erzeugen, müsste man schon 46 km/h schnell unterwegs sein. Bei 270 km/h, der üblichen Höchstgeschwindigkeit eines heutigen manntragenden Segelflugzeugs, wären es schon 35 mbar, entsprechend einem Fehler von fast 300 Metern...
> F3J Modelle liegen etwa bei 0,35-0,4m/s. Mehr zu dem Thema findest du > hier http://www.hq-modellflug.de/ Interessant. Das geringste Sinken ist demnach ungefähr das gleiche wie bei einem "großen" Segelflugzeug. Abgesehen vom Kurvenradius sollten sie sich damit in der Thermik durchaus vergleichbar verhalten.
Hoehenmessung (relativ zum Auslesepunkt) ueber barometrische Hoehenformel: "How-High": ca. 35Euro, 2.2g leicht, fuer SAL- bzw. DLG-Gleiter gemacht. Funktioniert fuer Relativmessungen sehr gut http://www.braeckman.de/elektronische_hoehe_speed.htm
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.