LPC2134
ARM UVision 4
Programmiersprache C
Guten Morgen,
ich hbae ein Timerproblem:
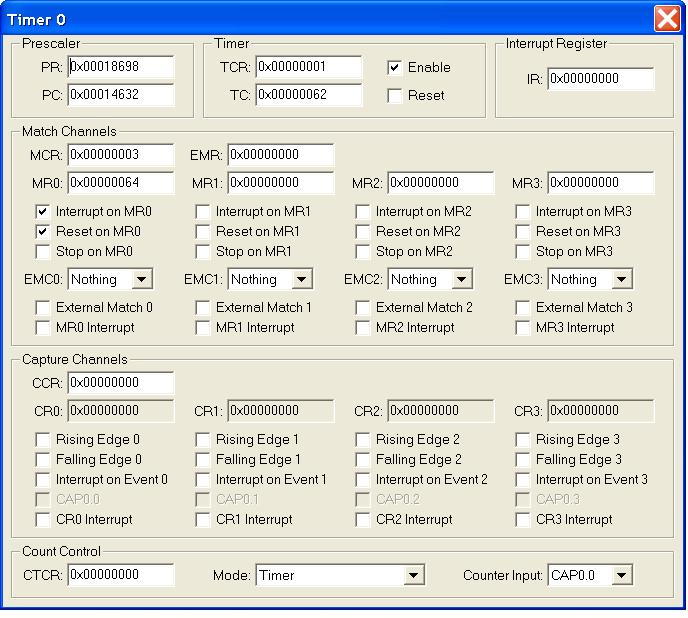
Bei mir läuft die Peripherieclock PCLK mit 55.592 MHz (PCLK = CCLK).
Mit Vorteiler 553dez (55.296 MHz / 553dez) erreiche ich 99.992,766 KHz
T0PR = 0x00000229; 553dez = 229hex
99.992,766 KHz / 100dez (0x64) = 999,927 Hz (1ms)
T0MR0 = 0x0064;
D.h die ISR wird jede 1 ms aufgerufen. In der ISR Routine zähle
incrementiere ich timer0_MS_counter bis 1000, da wird timer0_SEC_counter
incrementiert um Secunden zu zählen.
Aber irgendwie wird die Secunde nach 4 sec incrementiert?
Sind meine Berechnungen falsch.
Ich brauch für meinen Code einen Timer mit 1ms Auflösung.
Für Korrekturen oder Alternativen bin ich sehr dankbar.
1 | int timer0_init(void)
|
2 | {
|
3 | // Timer 0 Interrupt reset, Interrupt Register
|
4 | T0IR = 0x000000FF;
|
5 | // Timer Counter und Prescale Counter are enable for counting, Timer Control Register
|
6 | T0TCR = 0x00000001;
|
7 | // Choise for Timer Counter: every rising PCLK edge
|
8 | T0CTCR = 0x00000000;
|
9 | // 55.296 MHz / 100 = 552,960 -> Divider 553dez
|
10 | T0PR = 0x00000100; // Prescaler auf 99,99 KHz
|
11 | //T0PR = 0x00000229; // Prescaler auf 99,99 KHz
|
12 | // 0x64, Match mit 999,9Hz (1ms)
|
13 | T0MR0 = 0x0064; // Timer0 Match Register
|
14 | // Match Control Register
|
15 | T0MCR = 0x00000003;
|
16 | T0EMR &= 0x00000000; // External Match Register (Status lesen und Kontrolle)
|
17 | VICVectAddr0 = (unsigned long)tc0; // set interrupt vector in 0 ISR=tc0
|
18 | VICVectCntl0 = 0x20 | 4; // use it for Timer 0 Interrupt
|
19 | VICIntEnable = 0x00000010; // Enable Timer0 Interrupt
|
20 | return 0;
|
21 | }
|
22 |
|
23 |
|
24 | unsigned int timer0_SEC_counter = 0;
|
25 | unsigned int timer0_MS_counter = 0;
|
26 |
|
27 | void tc0 (void) __irq
|
28 | {
|
29 | timer0_MS_counter++;
|
30 | if ( timer0_MS_counter == 1000 )
|
31 | {
|
32 | timer0_SEC_counter++; //Increment Timer each 5 ms
|
33 | timer0_MS_counter = 0;
|
34 | }
|
35 | T0IR = 1; // Clear interrupt flag
|
36 | VICVectAddr = 0;
|
37 | }
|