nabend, ich wollte mir ein Elektrofahrzeug mit einem 48v-"Netz" und Joysticksteuerung (potentiometer-joystick 10 KOhm,Panzerlenkung durch "x"-Anordnung der Achsen zur Fahrtrichtung) bauen. Zur Regelung wollte ich 2 Vierquadranten-Drehzahlsteller einsetzen. Das Problem ist, dass ich bei diversen Elektronikversandhäusern keine 4Q-Steller mit diesen Leistungsdaten finden kann und die mir da generell viel zu teuer sind. Hat zufällig irgendeiner hier ein Schaltplan für 4Q-Steller mit Mosfets? Die Platine dafür könnte ich selbst fräsen (also mit so einem Gravograph-Graviergerät). Lediglich mit dem Layout habe ich des öfteren mal n paar Problemchen, wird dann meist zu verflochten, vielleicht hat ja auch in dieser Hinsicht jemand einen Tipp für mich. Danke für die Hilfe! Nils
Hallo Nils, Dein Projekt ist nicht gerade trival und Du scheinst auch noch viel Erfahrung mit der Herstellung von Schaltungen zu haben. Ich denke, so im Internet wird schwierig sein fertige Lösungen zu finden. Ausserdem, 48V und 50A sind schon etwas. Das kann im wahrsten Sinne ins Auge gehen. Gut, was mir eingefallen ist, schau mal beim Elektor nach. ElektorWheelie, Power und Stabilität für maximalen Fahrspaß. Gruss Klaus.
die drei KW lassen sich bei 48V einfacher handhaben als bei 12V. und wenn was schiefgeht sterben die mosfets sowieso. die 4 quadranten sind auch nicht soooo schwer zu bauen. zuerst brauchst du halt einen normalen motorregler mit vorwärts/rückwärts. wenn du ein getriebe mit rückwärtsgang verwenden willst brauchst du nur vorwärts, das ist deutlich einfacher zu bauen. wenn nicht bedeutet das H-brücke oder eine umpolschaltung für die motorwicklungen (falls du z.b. einen reihenschlußmotor hast, der ändert seine drehzahl bei umpolung nicht). damit fährt das ding dann erstmal. die elektronische bremse mit rückspeisung setzt den motor als generator ein und speist die gewonnene energie in den akku zurück. du brauchst also einen motor der sich möglichst einfach als generator verwenden lässt. im idealfall also ein permanent erregter motor. die generatorspannung ist meist niedriger als die akkuspannung (erst recht bei fallender drehzahl), du brauchst also einen wandler mit 50-5V eingangsspannungsbereich und einer ausgangsspannung über der batteriespannung. ein entsprechend leistungsstarker step-up-wandler schafft das. dieser muß in seiner leistung regelbar sein, denn die übertragene leistung bestimmt die bremskraft. mosfets schau dir z.b. den IRFP2907 an.
Ben schrieb: > generatorspannung ist meist niedriger als die akkuspannung (erst recht > bei fallender drehzahl), du brauchst also einen wandler mit 50-5V > eingangsspannungsbereich und einer ausgangsspannung über der > batteriespannung. Quatsch. Man missbraucht den Motor einfach als Stepup indem man den Motor kurz kurzschließt. Dabei speist der Motor Energie in die Wicklungsinduktivität, baut also ein Magnetfeld auf, dass beim Abschalten eine hohe Spannung erzeugt. So machen das nahezu alle Motortreiber. Der Vorteil davon ist, dass man hier nichts weiter beachten muss: Ist die durch das Tastverhältnis erzeugte Spannung der H-Brücke größer als die Generatorspannung des Motors, beschleunigt er, ist die Spannung dagegen kleiner, bremst er.
ja, eigentlich ist der Nennstrom bei etwa 35A, aber 50A halt als reserve für z.B. starke Steigungen. Und mit einem Umpolrelais und einer einfachen NE555er-Regelung habe ich mir das auch schon überlegt, allerdings möchte ich die rückwärtsfahrt auch über den Joystick steuern und der hat nunmal nur 2 Potentiometer. Was bräuchte man denn für einen 4Q-Steller sonst noch für Bauteile? Geht das auch mit den einfachen timer-Bausteinen? Rückspeisung ist nicht unbeding notwendig, wäre halt ne nette Spielerei, aber da ich evtl. auch einen Motor mit Schneckengetriebe verwende, hätte das nicht sonderlich viel Sinn. Aber planetengetriebe ist auch eine Option, ich stehe halt noch ziemlich am Anfang der Planung. Aber an Sich kommt wegen der Effizienz ohnehin nur ein PM-Motor dafür in Frage.
Angehängte Dateien:
-

layout.png
25 KB
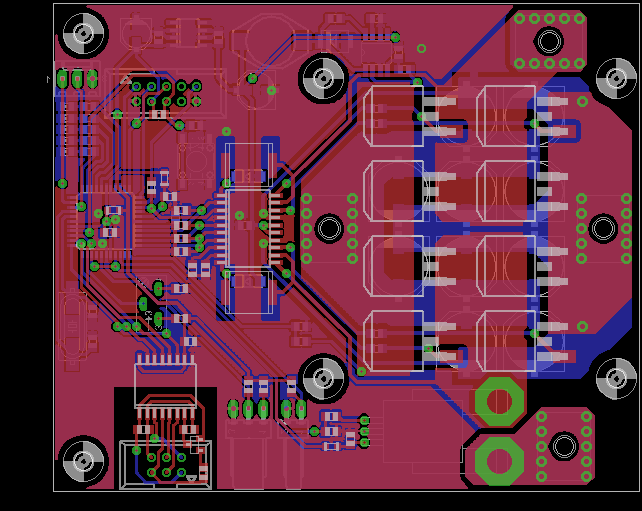
Ich bin gerade dabei einen Motorregler für einen 36V 500W DC-Motor zu bauen. Der erste Prototyp läuft schon ganz gut. Basiert auf einem ATmega32, HIP4081 H-Brücken FET-Treiber, ACS754 Stromsensor und galvanisch getrennter SPI-Schnittstelle. Im Anhang mal ein Layout, wie vermutlich die nächste Version aussehen wird. Auch wenn die aktuell geplanten FETs 60A Dauerstrom aushalten, muss man sich bei den Größenordnungen mal Gedanken zur Wärmeentwicklung machen. Aber falls du Neugierig bist, meld dich mal.
hey cool daß du dein design hier preisgibst. den motor beim rückspeisen als step-up verwenden? mit welcher arbeitsfrequenz? meinst nicht daß das einen geringeren wirkungsgrad hat als eine einfache gleichrichtung und anschließende transformation?
Ben schrieb: > den motor beim rückspeisen als step-up verwenden? mit welcher > arbeitsfrequenz? Mit der normalen PWM Frequenz, mit der man den Motor auch ansonsten ansteuert, also typisch ein paar kHz. > meinst nicht daß das einen geringeren wirkungsgrad hat > als eine einfache gleichrichtung und anschließende transformation? Kann sein, müsste man mal durchrechnen. Bei der einen Lösung hat man nur den Motor + Mosfet die statische + Schaltverluste + höhere Spitzenströme in der Motorwicklung aufweisen, bei der anderen Lösung sind die Verluste im Motor und den Mosfets geringer, dafür benötigt man aber einen zusätzlichen Stepup der Verluste produziert. Vermutlich wird der Unterschied aber nicht allzu groß ausfallen so dass sich sowas nur für Sachen mit etlichen kW und längeren Bremsungen lohnt. Ich habe die Version mit Stepup zumindest noch nie in der Praxis gesehen, sondern immer nur die einfache H-Brücke. Hier das ganze mal als 2Q Version: http://www.4qdtec.com/pwm-01.html#regen
Thomas Decker schrieb: > Im Anhang mal ein Layout, wie vermutlich die nächste Version aussehen > wird. Hallo Thomas, wie ist der Stand Deines Projektes? Ich plane momentan den Umbau eines GoKarts auf E-Antrieb mit 24V/400W oder 36V/500W Motor. Die Ansteuerung der H-Brücke mit Atmega ist ja mittlerweile fast Standard, Rekuperation hat man da gleich mit dabei und die Möglichkeiten der Erweiterung eines solchen "Spielzeuges" sind ja fast unbegrenzt. Da ich mit der Herstellung einer passenden Platine etwas auf Kriegsfuß stehe würde ich Dir gerne eine abkaufen und eventuell noch ein paar Tipps zur Programmierung erhaschen. Grüße aus Thüringen Thomas
Hallo Thomas, wie gesagt, der Prototyp wurde läuft an einem 5€ 200W 12V Motor mit 24V Akkuspannung. Der Motor wurde bestimmt hin und wieder etwas über Spezifikation betrieben. Wärmeentwicklung der Platine <30°C. Schaltplan und Layout sind überarbeitet, inzwischen ist ein AT90PWM316 statt dem atMega32 geplant, da dieser durch seinen PSC (Power Stage Controller) die gesamte PWM selbstständig erzeugen kann. Eine Platine wurde bischer jedoch noch nicht gefertigt, Programmcode für den neuen Controller hab ich auch noch nicht geschrieben. Wann es weitergeht, kann ich gerade nicht sagen, das ganze ist für einen Kumpel, der sich jetzt erstmal die entsprechenden Motoren kaufen muss. Ich hab dir eine Nachricht mit meinen Kontaktdaten geschrieben. Grüße Thomas
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.