Hallo, ich habe einen einfachen Ultraschall-Entfernungsmesser(Echolot) mit einem AVR aufgebaut. Bei Recherchen bin ich auf einen sogenannten "Side-Scan Sonar" gestoßen, aber leider finde ich keine Informationen, wie so ein Gerät physikalisch funktioniert. Nur dass eine Schall-Welle durch das Wasser gesendet wird, und dann aus dem Echo das Sonarbild erstellt werden kann. Weiß jemand zufällig, -wie aus dem Echo(s) ein Sonarbild entsteht? -ob ein Empfänger benutzt wird, oder benötigt man mehrere? Danke und Gruß Zoltan
hallo ich hab mal einen lowcost "fishfinder" gebastelt, und mich etwas mit der materie beschäftigt. das prinzip ist nicht weiter schwer: die reflexionen eines sonarsenders werden an mehreren, in einer linie angeordneten, empfängern eingefangen, und wenn man diese linie dann quer durchs wasser zieht, erhält man ein 3D abbild des untergrunds, bzw. von dem was drin herumschwimmt. im hitech bereich sind es dann nichtmehr einzelne sensoren, sondern ein array (bzw. auch differenzfreuquenzverfahren o.ä.) es gibt systeme die auf akkustik und ultraschall oder magnetometer und erdmagnetfeld beruhen (aktiv und passiv) probleme tauchen eventuell auf bei: -warm/kalt und verschieden schnell fließende wasserschichten -regeln der scan-geschwindigkeit für erfassung bewegter objekte -hohe frequenz (auflösung) -> weniger weit und umgekehrt. proffessionelle systeme schalten während des scans die frequenzen herum. auf http://www.abc.se/~pa/mar/sidescan.htm kannst du dich in den links ein bischen einlesen. hoffe zumindest ein bischen geholfen zu haben, martin m.
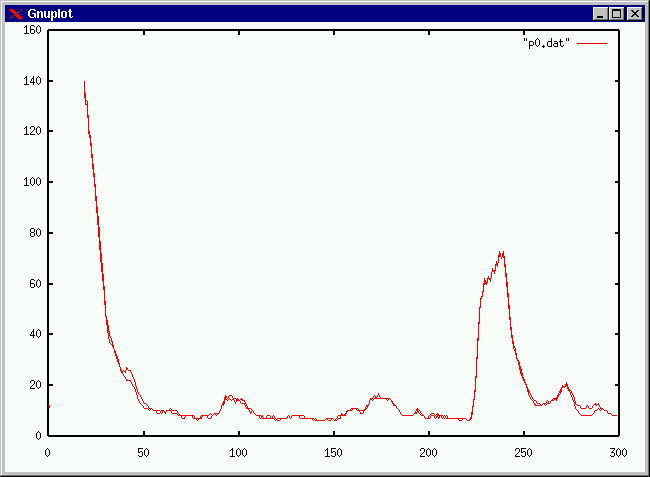
Hi Martin, danke für Deine Antwort. "...die reflexionen eines sonarsenders werden an mehreren, in einer linie angeordneten, empfängern eingefangen,..." Werden also mehrere Sensoren hintereinander angeordnet? Mir ist nicht klar, wie ich aus dem Echo auf die Position schließen kann. Wenn dass meine Senoraufnahme wäre (http://www.ele.uva.es/~jesus/sonar/eco0.png), wie kann ich dann daraus eine "Streifen" aus meinem Sonarbild erzeuegen? Ich weiß doch nur, dass ich nach 100 und 230 ms eine Reflexionen von einem Objekt gemessen habe, aber wo diese Objekte liegen weiß ich aus dem Diagramm nicht. Ausser wenn man annehmen würde, dass der Meeresboden eben ist. Dann kann ich aus der Laufzeit mit Hilfe von Pythagoras auch auf die Position auf dem Grund Schließen. Wird das villeicht so gemacht? Ich kenne den Link bereits. "Thus each pulse lets us see a narrow strip below and to the sides" : die Erklärung ist leider sehr kurz gehalten. Gruß Zoltan
Hi Zoltan Ich hab zwar keine Ahnung von Sonartechnik, bin aber mal über folgenden Link gestolpert. http://www.punaridge.org/doc/sitemap/Default.htm Da sind einige Infos zum Side Scan Sonar und dessen Auswertung drin. MfG Mike
mh, vielleicht mein fehler, ich glaub immer das alle so kompliziert denken wie ich :-) zum diagramm: (sieht prima aus) also bis 50ms sind noch die eigenreflexionen, schaltungsbedingt... nehme ich an. bei 220ms hast du einen eindeutigen signalreflex (die andern lass ich mal weg). wiederholst du diese messung nun periodisch, sollte das signal immer gleich aussehen. schiebst du den ganzen messapparat nun horizontal linear durchs wasser, bekommst du einen 3D plot, der dir eine einzige linie als tiefenecho ausgibt. (also eigentlich erst 2D) angenommen du schiebst deinen messapparat nun über einen runden ball, der inmitten von unendlich viel wasser ist (in allen dimensionen um störfaktoren auszuschließen, und das prinzip zu erklären) 1. messung: kein echo 2. messung: echo bei 250 (du streifts den [runden] ball am rand) 3. messung: echo bei 227 (1/4 des balls, 227 ist nicht die exacte e-funktion is aber egal hier) 4. messung: echo bei 220 (ballonmitte: oberseite, maximale nähe des balls) 5. messung: echo bei 227 (3/4, wieder irgendein pi wert) 6. messung: echo bei 250 (und die andere, am weitesten enternte noch-sehbare seite des balls) 7. messung: wieder kein echo ein graph aus diesen werten ist also nur ein hügel auf einer geraden. (hab ich das wirklich grad gesagt ?) das ganze system baust du dann (z.b.) 100 mal nebeneinander auf, und ziehst sie, wie einen besen linear weiter, die borsten sind die sensoren. legst du all diese graphen dann parallel, hast du einen echten 3D tiefenplot. das ist abstract erklärt, hau mich bitte nicht :) wenn ichs wieder unglücklich erklärt hab, frag ruhig nochmal, zeichnen kann ich besser als erklären, dann bring ichs auf papier. wenn du nun wegen den hundert schaltungen schluckst, keine angst. hier kommt dann das sensorarray zum einsatz (sender braucht ja nur einer sein. bzw. 2 oder mehr für verschiedene frequenzen) das array kannst du zeitversetzt mit multiplexern abfragen. also eigentlich nix anderes als ein scanner und sein single-line-ccd-linear-sensor nur halt siehst du statt farben die tiefe. viel spass beim planschen, martin
Ich empfehle, die Internet-Seiten der Firma Elac Nautik, Seabeam und Reson zu besuchen. Die beschäftigen sich mit solchen Anlagen. Sie werden auch "Fächerlotanlagen" genannt, da sie den Meeresboden fächerförmig (also 2D) abtasten. Mit Hilfe der Schiffsnavigation (Kompassdaten, GPS etc) werden dann aus den 2D Bildern wunderschöne 3D-Bilder. Martin hat das schon richtig erklärt: Es wird ein "Strahl" ausgesendet, und die Echos mit einer Reihe/Zeile von Wandlern aufgenommen. Durch Zusammenschalten bzw. Überlagern von mehreren Sende-Wandlern kann man auch noch ein Beam-Forming betreiben und den Sendeimpuls in eine bestimmte Richtung lenken. So ist es sogar möglich "Hinterschnitte" abzubilden. Wie gut das ist, kann man an den Bildern der "General von Steuben" sehen. Gruß Rahul
Angehängte Dateien:
-

SSS.jpg
170 KB
{kind=link}
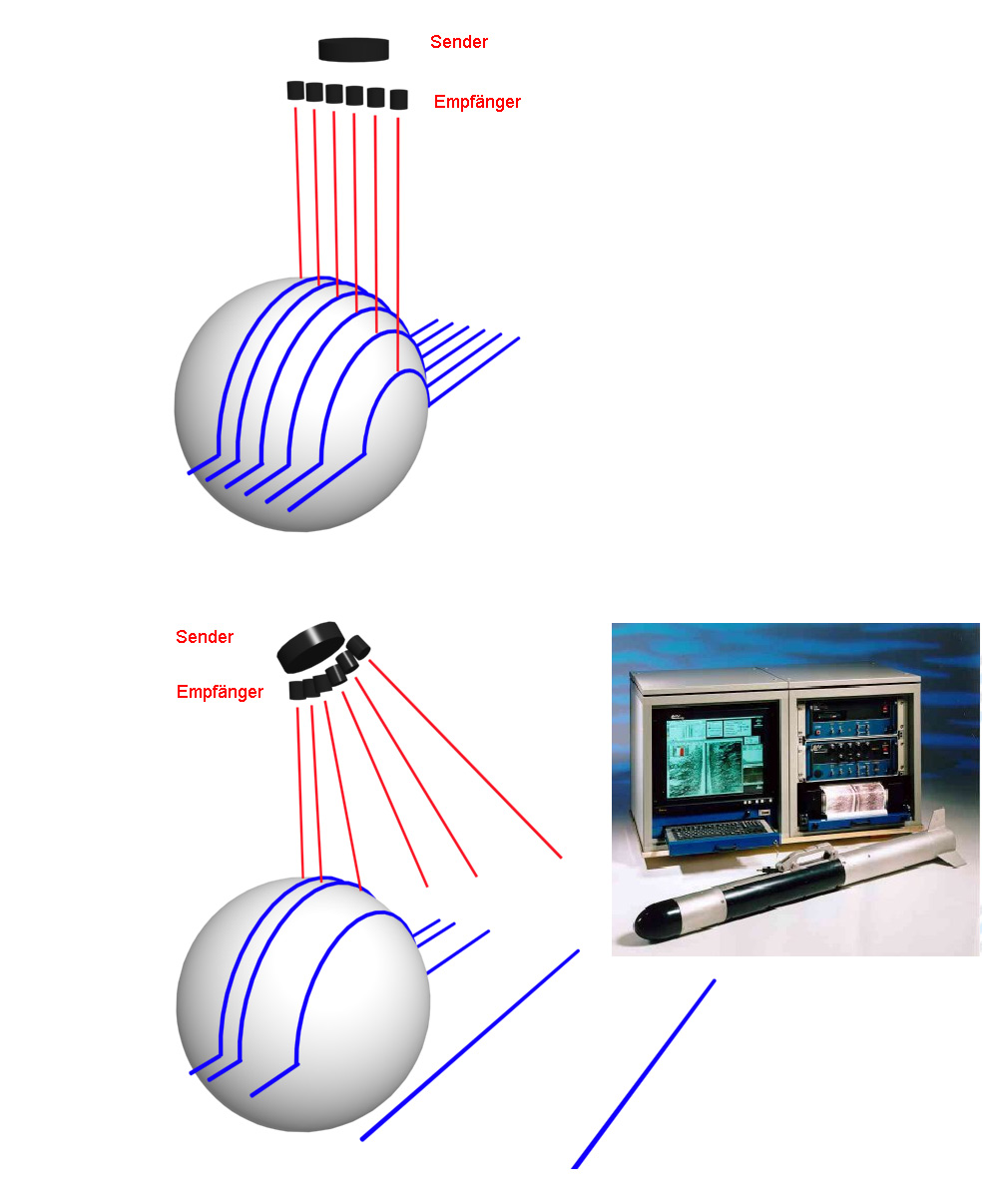
Ok, ich habe ein Bildchen dazu gemacht. Ich nehme an, dass dann beim Sidescan Sonar, die Empfänger auf einem Kreis angeordnet sind? Mir war nicht klar, dass die Ultraschall-Empfänger einen dermaßen kleinen Bereich bzw Öffnungswinkel haben können, das man mit Ihnen so zusagen wirklich einen Streifen punktweise Scannen kann. Also hat dann auch jeder Pixel einen eigenen Empänger? (wohl nicht, aber wenn nein, wie bekommen die Leute dermaßen scharfe Aufnahmen wie den "General von Steuben" hin?) Ich habe alle Links durchgeschaut, aber wirkliche Hintergrundinformationen gibt kein Unternehmen preis. Vorallem, wenn es um Rüstung geht, wie bei Elac Nautik. Schade schade. @Martin Könntest Du mir Informationen über Deinen "fishfinder" zur Verfügung stellen?
es braucht ja nicht für jeden pixel ein empfänger, die echos kommen ja nacheinander an
@martin Hallo Martin, es wäre toll, wenn Du Dein Projekt mit dem Fischfinder veröffentlichen könntest. Ich wollte mir schon lange sowas bauen, finde aber keinen Anfang. Was hast Du als Schwinger benutzt und wie sieht Deine Hardware sonst so aus? Ein Profi (glaub ich zumindest - baut Echolote erwerbsmässig) hat mir gesagt, ich müsste mit mindestens 200 kHz arbeiten, die kurzzeitige! Leistung am Schwinger würde bis 2 KW betragen und das Ding müsste mit hoher Spannung angesteuert werden. Es kommen nur spezielle keramische Schwinger in Betracht!Kosten so 50-100 EUs! Hm!? Mein Projekt (schon sehr lange im Kopf) sieht so aus: Ich bin Hobbytaucher und hätte schon öfter mal gern ein Plan von dem jeweiligen Gewässer. Ich weiss, das geht vom Weltraum aus grins siehe z.B. Müggelsee-Homepage. Kommt für mich also nich in Frage. Ich hab mich an ein Sidescan Sonar überhaupt nicht rangetraut, da ich auch keine Infos gefunden habe. Also der Einzelpunktweg über folgenden Plan: Schlauchboot oder ferngesteuertes Modellboot mit GPS Modul an Bord und Tiefensonar. Evtl. an Land ein zweites GPS Modul feststehend. Sozusagen ein eigenes DifferzGPS. Ich brauch ja nicht die genauen Koordinaten sondern nur die Position von einem feststehenden gedachten Fixpunkt. Durch die mitgesendete Zeit im GPS Signal ist die Aufzeichnung und spätere Synchronisation kein Problem. Dann mit jeder empfangenen Position (ca. jede Sekunde bei meinem GPS Modul) die Tiefe mit aufzeichnen und rastermässig das Boot übern See fahren. Dann kann ich später aus den Daten ein 3D Gitterbild errechnen und ausgeben (mit PC). Man kann damit zwar keine Objekte finden, aber ein Plan vom Seeboden ist doch auch schon was. Das Projekt spukt mir schon einige Jahre im Kopf herum, wurde aber bisher nie so richtig angefangen. Gruss Holger
Hallo Holger! Dein Kollege hat schon Recht, dass man spezielle Keramiken braucht. Auch müssen die je nach Wassertiefe mit entsprechender Leistung betan werden (Dämpfung durch's Wasser...), da man ja auch ein Echo empfangen will. Die Idee mit einem kleinen Boot einen See zu vermessen klingt schon interessant. Hast Du aber auch den Wellengang beachtet? Rollen und Stampfen eines Modellboots kann den ganzen Spaß zu nichte machen... Im (Hobby-)Seglerbereich gibt es einfach Echolote für relativ wenig Geld, die einfach nur nach unten pingen und die Laufzeit messen, bis das Echo wieder da ist (und durch 2 teilen). GPS hatte doch das Problem, dass es ohne besondere Aktivitäten nur eine Auflösung von etwa 1m hatte, oder? Die kann man wohl durch differentielles GPS etwas erhöhen, aber auch nicht wirkich genau gestalten. Die Fächerlotanlagen haben neben dem NMEA-Eingang für die Schiffsdaten auch meist noch Sensore für Rollen und Stampfen. (soviel zur Positionsgenaugikeit) Die hohe Auflösung erzielt man durch einen riesigen Software-Aufwand: In so einer Anlage sitzen ein Haufen DSP, PCs und noch mehr Schnickschnack. Das "bastelt" man sich nicht einfach mal so am Wochenende zusammen. Ich würde mich mal auf dem Segler-Markt umgucken, ob es da nicht vielleicht ein Echolot gibt, das noch einen Tiefen-Ausgang besitzt. Damit könnte man sowas am besten ausprobieren. Die dürften aber auch bei 300-400 Euro liegen. Gruß Rahul
Hallo Zoltan willst du mit Murata US Wandlern arbeiten ? wie willst du sie wasserfestbekommen und wie die Ankopplung im Wasser. Prof. Schwinger haben ca. einen Durchmesser von ca. 10cm und wiegen ca. 1-2kg. Bestehen aus Metall mit O-Ring dahinter die Piezoscheibe, werden mit Hochspannung angesteuert. Die von Murata sind zwar feuchtigkeitsgeschützt aber bestimmt nicht druckfest. Wenn man den Wandler umschaltet kann man ihn als Sender und Empfänger benutzen. Totzeit ca. 40cm.
@Frankl es gibt auch eine wasserfeste Ausführung, wie du sagst, der laut Datenbalatt aber nicht für Unerwasser gedacht ist, sondern nur wasserdicht gekapselt ist: http://www1.conrad.de Nr.: 173681 (18 ) Mit diese experimentiere ich gerade. Bei RS gibt es auch einen "Ultraschalldetektor für den Einsatz unter Wasser" (59 ) http://www.rsonline.de/ Nr.: 1811794 Und ich habe noch einen Hersteller in Australien gefunden : http://www.hexamite.com/heusline.htm http://www.hexamite.com/pricelist.htm Man ist da mit 179 $ dabei. Ich glaube, dass das gößte Problem die Beschaffung von geeigneten Piezo Sendern und Empfängern ist. Und das zweite Problem (für mich) ist die Hochspannungsgeschichte, rein aus Sichhereitsgründen.
Wenn du ein 180 Scan machen willst und mit einem Array arbeiten möchtest, kommen da schon ein paar Wandler (Gewicht) zusammen. Als Alternative könnte ich mir eine Gummiblase in der sich der/die Wandler befinden und die mit Oel (Pflazenoel wenn Leck dann Abbaubar) gefüllt ist, vorstellen. Das könnte auch mit normalen Muratas (6 Euro, leicht, kleiner Durchmesser) gehen. Die kannst Du denn auch mit normaler Spannung (12V in Gegentakt)betreiben. Ein Versuch ist es Wert.
Einen Luft-Wandler mit Öl zu füllen wird keinen Erfolg bringen, weil sich dadurch auch die Resonanzfrequenz des Wandlers ändert, wenn er überhaupt noch schwingen kann. Die gekappselte Version hingegen besitzt ein sehr stabiles Gehäuse. Die Kopplung zwischen Luft und Wasser ist dabei aber ein Problem.
@Rahul Hallo Rahul, Das mit dem Seegang sehe ich nicht so als Problem. Ich muss sowas ja nicht bei jedem Wetter machen und es finden sich immer wieder Tage, wo es schön genug ist. Ich will ja nicht die Ostsee vermessen ;-). Wenn so ein See z.B. 3ha misst, kann man eh nur in ein paar Streifen drüberfahren. Die Auflösung von 2-5 m sollte reichen. Ich will ja einen Eindruck gewinnen und nicht eine Millimeterkarte des Seebodens erstellen. Objekte suchen, geht sicher mit der Technik sowieso nicht in vertretbarem Zeitrahmen und verschollene Uboote im Binnensee sind leider sehr selten geworden. Ein versunkenes Segelboot von 15m könnte allerdings schon einen Peak verursachen. 300-400 Eur sind mir deutlich zu viel für Spass! Ausserdem fehlt der Selbstbaukick. Gruss Holger
also ich hab die restlichen postings nurmehr überflogen, aber wegen details zu meinem fishfinder: nein, ich gebe keine fertigen bauanleitungen raus, ich freu mich ideen, umsetzungen und fragen von leuten die sich schon vorinformiert haben zu unterstützen, aber nicht die natürliche faulheit. (nicht böse gemeint) low cost: (fishfinder und andere 2D) es sind keine meter-durchmesser, kiloschwere keramikschwinger von nöten. wer ein bischen im netz sucht, stößt schnell zb. auf den SMARTCAST, oder, auch für den gameboy gab es vor vielen jahren in japan ein add-on (plug-in). natürlich hält sich die tiefentauglichkeit bei diesen geräten in grenzen. aber das prinzip bleibt das gleiche. beide funktionieren mit mehr oder weniger handelsüblichen transducern. hitec: side scan, bedeuted nur, das das sensorarray nicht mehr linear nebeneinander, sondern zentriert, dafür sektorenweise in winkeln abgestrahlt wird. etwas(viel) mathematik in der auswertelogik kompensiert die auftretenden laufzeitunterschiede und viele andere damit auftretende und nicht zu unterschätzende probleme dann. hier sind durchaus höhere leistungen und spezialtransducer die preislich gesehen jenseits von gut und böse liegen vonnöten, aber das prinzip bleibt wieder gleich. wie von rahul erwähnt, werden diese systeme dann mit GPS & nick/roll/drift/temp sensoren perfektioniert. (ich arbeite aber ungern mit bauteilen über 10 euro, da ich viel zu oft ungewollte Ptot tests mache :) mein fishfinder: wie auch eine led und viele andere bauteile, kann mann US transducer durch pulsbelastung um ein vielfaches über den werten betreiben. kleinbasteleien bleiben vermutlich unter 6m, was sich zwar wenig anhört, aber für mich, als flachländer der nur in fischteichen herumplanscht ist dies mehr als ausreichend. meine schaltung ist über die tage immer mehr gewachsen, und sieht grob erzählt nun so aus: mein angler-schwimmer ist bestückt mit: 2 US kapseln (mit 1 geswitchen, erkenne ich fische direkt unterm schwimmer nicht, die wasserfesten sind meist baugleich, nur mit hut. für geringe tiefen tuts auch eine folie) einem simplen widerstandsmessenden "wasser-über" sensor (als biss-anzeige) einem nacht-led-toplicht einem unidirektionalen 433 MHz sender (T/X set für 12 euro vom großen C) für gute 100m einem platin temp sensor einem pic µC 2 lithiumzellen empfänger: basic stamp (wegen schneller, unkomplizierter field-reprogrammierung) 433er empfänger lcd beeper& led entstanden ist das projekt weil ich mich in den manchestercode einarbeiten wollte. in regelmäßigen abständen (batteriesparen!) meldet der sensor ein "ok" signal, auch weil wegen der sender, wenn er von fischen unter wasser gezogen wird, drastisch an reichweite verliert, und ich so selbst im ungünstigsten fall innerhalb 50ms das fehlende signal erkenne. weiters werden noch batteriezustand und wassertemp übermittelt. ich benutze kein grafikdisplay, sondern messe nur die maximale tiefe (wenn überhaupt messbar), und übertrage 40 sekunden lang, nach dem werfen (erkannt durch unterwassersensor), die aktuelle tiefe, und zeige sie blockgraphisch auf dem 2*16segment matrixsiplay an. ein unreglmäßiger wert (baum, fisch was auch immer) gibt mir ein sofortiges signal, dort belasse ich dann den schwimmer, beißt nix, werf ich neu. probleme die ich hatte: dichtheit des gehäuses (vergießen wegen permanenten umbau nicht sinnvoll) horizontalabweichung durchs ziehen (leine in der mitte befestigen, vielleicht mal ein ADXL210?) kraut und algen (bisher nicht wirklich gelöst) signalverlust bei unterwasser (mithilfe ok-signal gelöst) batterietausch (wenn ich mal zeit habe will ich eine induktionsladung einbaun, a-la elektrische zahnbürste) spannungsverlust durch tiefe temperaturen in der kalten jahreszeit. zuwenig zeit zum fischen, weil ich dauernd softwareanpassungen vornehme :) fisch ahoi - martin
was ich noch sagen wollte eigentlich: beim großen C gibts einen "abstandswarner" US bausatz um 10 euro. (114456-33) kaufen, bauen, herumspielen und alles mögliche damit testen. so bekommt man am besten ein gefühl für reichweiten mit filtern, unter wasser, mögliche leistungen usw. (ich bastle zuerst und berechne hinterher:) die bauteile habe ich durch die überlastungen zwar nach der reihe alle fritiert, und immer wieder durch zusatzschltungen ersetzt aber die transducer, und die grundschaltung ist noch immer genau die in meinem gerät. viel glück
@Frankl ja, habe ich. In einem 3 m langen und 0,5 m breiten Testbecken wurden der wasserdichte Empfänger und Sender sich gegenübergestellt und dann habe ich am Osci und mit einem AVR die Echos ausgewertet, bzw. die Laufzeit gemessen. Ich müsste aber auch in freien Gewässern ein paar Tests machen, weil in einem Becken sehr viele Reflexionen entstehen. Nur ist es halt schwierig am Baggersee Strom für den Osci zu bekommen. Gruß Zoltan
Dann kannst du ja die gekapselten ja in ein wasserfestes Gehäuse einbauen, so das das Vorderteil der Kapsel im Wasser ist. Bei 32 Stück hast du ca. eine 360° Grad abdeckung. Da das Array ja aufs Bug kommt und der Bootskörper im Wege verzichtest du auf 2 Wandler. Die Wandler werden mit analogen Multiplexer nacheinander selektiert (Winkel) und dann je nach Funktion TX oder RX nochmal mit einem Muliplexer selktiert. So hast fast 360° Info vor deinem Bug. Wie willst Du die Datenflut sichtbar machen. Über HF-TX und dann mit HF-RX als 360° auf dem Laptop ?. Schönes Wochende und Spaß beim Basteln.
So ungefähr wie das hioer könnte ich mir das vorstellen. Allerdings brauche ich keine 360 sondern es würden auch 90° reichen. Mit sechs nach vorne gerichteten Senoren könnte ich auch die AD-Wandler eines Atmega8 benutzen. Allerdings ist die Sampelrate (auch wenn ich die Werte Puffern würde) warscheinlich zu gering: Wenn der Schall in Wasser eine Geschwindigkeit von 1480 m/s hat und eine Auflösung von 0,05 m erreicht werden soll, dann müsste man mit 29,6kHz (33,8 µs) abtasten. Die maximale ADC-Taktfrequenz sollte laut Datenblatt nicht über 200 Khz gewählt werden(für 10 bit, die man hier eigentlich nicht braucht). Bei 250 Khz und den 13 Takten für eine Wandlung ergibt sich aber eine Abtastzeit von 19,2 Khz. Es ist also nur möglich einen Wandler abzutasten. Dagegen wäre der Wandler von RS für die 60 noch preislich vertretbar(obwohl RS sehr sehr teuer ist) und mit einem Schrittmotor zum Schwenken könnte ich auch mit nur einem Wandler auskommen. Allerdings kann ich mir kaum vorstellen, dass die Schaltung aus dem Datenblatt zu dem Senor (siehe Dateianhang oben) die 50 W Leistung bringt. Diese Lösung scheint mir am realistischten. So ähnlich also wie hier: http://www.ele.uva.es/~jesus/sonar/sonar.html Eine Frage zu RS: Kann man da überhaupt als Norlmalsterblicher Ware bestellen? Gruß Zoltan
@Zoltan: könntest Du den Dateianhang nochmal reinstellen? @Martin: 1.Frage: Wie steuerst Du Deinen Sender an? Ich hab gegensätzliche Infos. der eine sagt, ich muss einen Burst (15-20 Schwingungen auf der Resonanzfrequenz) senden, andere Pläne gehen von nur einem (sehr kräftigen) Nadelimpuls aus und der Schwinger schwingt dann selbst mit ein paar Schwingungen aus. 2.Frage: Ist Dein Empfangsverstärker mit Filtern selektiv auf die Resonanzfrequenz abgestimmt? @Alle: Weiss jemand, wie die Profisensoren innen gekoppelt sind? Ich hab mal eine Unterwasserlampe (Tauchlampe) gebaut und wollte den zur Neige gehenden Akkustand auch akustisch durch Piepser signalisieren. Auf dem Labortisch sind mir mit so einem kleinen Piezopieper fast die Ohren abgefallen. Im Lampengehäuse eingbaut (GFK - Glasfasermatte+Polyesterharz gewickelt) hab ich die Signale unter Wasser überhört bzw. nur wargenommen wenn ich direkt drauf geachtet habe. Die Dämpfung war enorm! Mir würden jetzt noch diese Rohpiezos einfallen, wie sie in Mikrowellen oder billig-Lautsprecherboxen eingebaut sind einfallen. Von der einen Seite ein rundes Messingblech, auf der anderen Seite die Keramik und metallisiert zum Löten. Aber die Resonanz liegt wohl viel zu tief - ich weiss nich ob man evtl. eine Oberwelle nutzen könnte. Mein Generator geht nur bis 22 kHz und so konnte ich das noch nicht ausmessen. Ein Vorteil hätten die Dinger: Wasserdichter Einbau mit der Piezoschicht nach innen - kein Problem. Gruss Holger
holger, frequenz verstärkt auf emitter (ich glaub knapp unter 100µs waren das, also schon eher burst) und wird über einen 567 (discontinued, leider) wieder eingelockt. idee hatte ich hierher: http://www.leang.com/robotics/info/articles/minison/minison.html allerdings habe ich noch einen ernsthaften sendeverstärker eingebaut, und den empfänger 2stufig verstärkt (wegen filter) und ein einfacher treiber nach dem LM. martin
Hi Holger, http://www.mikrocontroller.net/attachment.php/106660/data.pdf zu Deiner 1. Frage: Der Vorteil von mehreren Pulsen ist meiner Meinung nach, dass die Wandler mit Ihrer Eigenschwingung angeregt werden können, also es entsteht Resonanz. Das Bedeutet wiederrum, dass die Piezzokristalle viel stärker schwingen und damit mehr Energie Abstrahlen. Der Nachteil von vielen Pulsen ist, dass man kein klares Echo von kleinen Objekten mehr bekommt, weil sich die Reflexionen überlagern. Die Auflösung sinkt daher. Gruß Zoltan
Hallo Zoltan mit dem Verstärker von Murata hatte ich keine großen Erfolge, da die Verstärkung zu klein war. Ich habe für Überwasser immer einen Burst (25µs + 25µs) genommen 12V in Gegentakt. Der Wandler schwingt denn bedämpft aus (Empfangstotzeit).
@Holger: Die professionellen Piezos haben von der Dicke her wenig mit denen gemeinsam, die Du ansprichst (u.a. auch in Digitaluhren). Die dünnste Keramik, die ich in den Fingern hatte, war so 5mm dick. Es kommt halt auf den Anwendungszweck an. Bei deiner Taschenlampe mußt du wohl eine andere (tifere) Frequenz wählen, wegen der veränderten Resonanzfrequenz. @die, die es interessiert: im Normalfall wird ein Burst gesendet, der eine bestimmte Zeit andauert (ist bei sowas nunmal so...). Dieser Burst ist aber nicht einfach Strom an und wieder aus, sondern wie beim FBAS hat dieser Burst eine aufmodulierte Frequenz. Welche das nun ist, habe ich vergessen (wohl auch besser so... wegen Firmengeheimnis). Die Länge dieses Impulses bestimmt einerseits die Mindestentfernung eines Ziels, andererseits aber auch die maximale Tiefe. (Einleuchtend?) Radar (ausser CW-Radar/Blitzkisten-Radar) funktioniert auch nicht anders vom Prinzip her. Ich hab mir jetzt auch nicht die Wandler von RS oder Murata angesehen. etwas OT: [OT] Hat sich jemand schon mal über "Piezo-Aktuatoren" bzw "Piezo-Aktoren" kundgetan? Das sind Stellglieder im nm-Bereich (oder doch schon µm? Müsste ich jetzt nachgucken). [/OT] Gruß Rahul
Also braucht man überhaupt einen AD-Wandler es interessiert doch eh nur die laufzeit bis zu einer Reflextion, Auschlag. OPs werden sowie so verwendet, zur vertärkung, filtern, integration. Man nimmt noch einen verwendet ihn als Komperator, und hängt das ganze an einen Port. Um Jetzt reflextionen von weiter weg festzustellen, nimmt man eine veränderliche Komperatorspannung(DA-Wandler) und senkt die Spannung mit zunehmender Zeit ab. Dann kann man einfach über portabfrage laufzeiten messen Hoff ich konnt ich konnt verstädnlich machen was ich mein. Hab auch schon nen US Abstandsverstärkung gesehen, mit veränderlicher Verstärkung, hier würde die verstärkung mit zunehmender Zeit vergrößert. Denk aber das man eine veränderliche Spannung einfacher zu steueren ist. (DA-Wandler) Außerdem fällt hier die aufwendige analyse der Messwerte weg
@Rahul: Hm, hab ich mir fast schon gedacht. Jetzt ist mir auch klar, warum von so hohen punktuellen Leistungen gesprochen wurde. Eine 5mm Keramikscheibe zum schwingen zu bringen braucht natürlich Energie. Bei dem Burst wird doch sicherlich die Arbeits-(Resonanzfrequenz) des Schwingwers verwendet? Mindestentfernung ist klar, aber warum die max. Tiefe von der Frequenz abhängt, ist mir nicht so klar. Ich dachte, die hängt weitestgehend von der Empfindlichkeit des Empfängers, der Verstärkung der Schaltung und der "Trennschärfe" des Eingangsfilters ab. Denn das Signal wird ja mit zunehmender Entfernung schwächer (lin. oder log.?) Ich dachte immer es wird mit dem Quadrat der Entfernung schwächer. Nach meiner Information soll die Arbeitsfrequenz auch Einfluss auf die Genauigkeit bei unterschiedlichen Grundeigenschaften (fester Seeboden, Schlamm ...) haben. Wie das genau zusammenhängt hab ich noch nicht rausgekriegt. zum Thema Piezo Aktoren bin ich bei meiner Suche nach Transceivern auf folgende Seite gestossen: www.pi.ws Sonst weiss ich nur, dass wohl in neueren Dieselmotoren in der Einspritztechnik sowas drin sein soll, hab mich aber noch nicht mit beschäftigt weil der Anwendungsfall für mich nicht da ist. @alle: So wie Jochen es vorschlägt wollte ich es eigentlich machen. Wie habt Ihr es mit ADC gemacht? Wie würde die Programmtechnische Auswertung mit ADC aussehen? Ich hab gar keine Idee für einen Ansatz! Den Maximalwert ermitteln und annehmen, dass das die Hauptreflektion ist, dann noch ermitteln, zu welchem Zeitpunkt dieser Wert erreicht wurde??? Wäre schön, wenn das mal jemend erklären könnte. Ansonsten sehe ich schon, wird es wohl besser sein, einen fertigen Transceiver aufzutreiben. Selbstbau oder irgenwelche Piezoscheibchen fallen wohl weg. Ich brauch schon mal Tiefen von bis zu 70 m ! Hat einer einen Tip für eine preiswerte Quelle? Gruss Holger
Das mit der 5mm starken Keramikplatte erinnert mich an ein Ultraschall-Reinigungsbad, da klebt eines unten an der Edelstahlwanne. Mal bei ebay oder beim Elektronikschrott suchen. Auf diesem Gebiet läuft ja jede Menge: http://cgi.ebay.de/ws/eBayISAPI.dll?ViewItem&category=37410&item=6115489657 Angebot endet: 29.08.04 20:13:14 MESZ http://cgi.ebay.de/ws/eBayISAPI.dll?ViewItem&category=19960&item=2488183414 Angebot endet: 29.08.04 20:16:19 MESZ oder hier ein fertiger Fish-Finder: http://cgi.ebay.de/ws/eBayISAPI.dll?ViewItem&category=384&item=3695105410
Hallo,
nun bin ich aus dem Urlaub zurück...
@Frankl
welchen Verstärker meinst Du?
@Jochen "Also braucht man überhaupt einen AD-Wandler es interessiert
doch eh nur die laufzeit bis zu einer Reflextion..."
Ich glaube vestanden zu haben, wie Du es meinst, aber ich will auch die
stärke der Reflexionen auswerten.
Eine einfachere Lösung, basierend auf Deine Idee wäre, nach dem
Aussenden des Schalls eine variable Totzeit in den Empfänger zu
programmieren, um nahe Reflexionen nicht zu erkennen, bzw. um nicht nur
den in der ummitellbaren Nähe befindlichen Objekte erfassen zu können.
@Holger Gerwenat
"Wie habt Ihr es mit ADC gemacht?"
Ich habe aus Testzwecken einen Atmega8 den OP Ausgang des Empfängers
Scannen lassen. Die 256 Werte wurden ein ein Feld abgelegt und erst
nach der Beendigung des Empfangvorganges zum PC gesendet. Raus kommt
das selbe, wie am Oszi, nur eben Punktweise abgetastet.
...
ADMUX = 0; // select channel
ADCSR=(1<<ADEN)|(1<<ADPS2)|(1<<ADPS0); // enable ADC single
conversion 250kHz
for(k=0; k<255; k++){
ADCSRA|=_BV(ADSC); // start conversion
Feld[j]=ADC;
j++;
while((ADCSR & (1<<ADSC)));
}
// Senden an PC
for(k=0; k<255; k++){
uart_send_u8(Feld[k]/4);
for(z=0; z<0x000F; z++)
}
...
Unter dieser Seite ( http://www.portup.com/~dfount/sidescan.htm) findet
man einen Link, zu einem Hersteller:
->http://www.boatersland.com/lowducers.html
"PD-W Pod-style transducer designed for shoot-thru-hull or trolling
motor mounting. 20' cable. Gray connector. 192khz, 20 degree
$52.99"
Eventuell ließe sich mit einer akkustischen Linse eine Fokkusierung in
der Breite erreichen.
Ich versuche einmal meine Erkenntnisse zusammenzufassen:
Ein "einfacher" Sidescansonar besitzt einen Transciever pro
Seite.(Mehrere Tansciever pro Seite dienen zum Fokussieren und Steuern
des Schalls (Multi-beam design) ). Der Schall wird in einem Burst mit
aufmodulierter Frequenz ausgesendet und aus den Laufzeiten und den
Intensitäten der Echos entsteht eine Zeile eines Sonarbildes. Aus der
Länge der Sonarschatten hinter einer Reflexion und der Höhe über Grund
des Transcievers kann bei Bedarf die Höhe der Objekte ermittelt
werden.
Der Schall wird von dem Transmitter von oben gesehen in einem sehr
engen Winkel (1°) ausgesendet und von der Seite gesehen in einem Winkel
von 20°. Der Schall breitet sich nur in einem sehr flachen zylindrischen
Raum aus (ähnlich eine auf der Kante stehende Münze).
Gruß
Zoltan
P.S.:
Bei http://www.marinesonic.com/ kann man unter "Downloads" ein
Programm herunterladen, mit dem man die echten Sonardaten anschauen und
auswerten kann, nur muss man den PC auf 256 Farben umstellen.
Im Datenblatt von MURATA ist ein US Verstärker abgebildet, den meine ich. Ich habe mein Verstärker mit drei Transistoren aufgebaut. Da der Verstärker mit 12V gespeist wird, ist am Ausgang eine 5 V Zenerdiode eingeführt und geht den auf den einen Komperator Eingang vom AVR, an dem anderen Komperatoreingang liegt ein Spindeltrimmer. Es wird bei meiner Applikation nur die erste empfangene Reflexion ausgewertet.
Ich habe auch ungf. die selbe Schaltung aufgebaut (man kann auch einen RS232 als "Verstärker" benutzen). Ich habe noch nicht genug getestet, um über die Reichweite etwas aussagen zu können. Bei 3 m zwischen Empfänger und Sender sind die Scahllwellen aber noch angekommen. Ich habe eine pdf Datei gefunden, der die Funktion von "Forward Looking Sonaren" beschreibt. Es gibt in dem Dokument auch einige Abbildungen über professionelle Sonare. http://www.sonatech.com/tech_papers/Comparison_FLS_web.pdf Gruß Zoltan
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.