{kind=link}
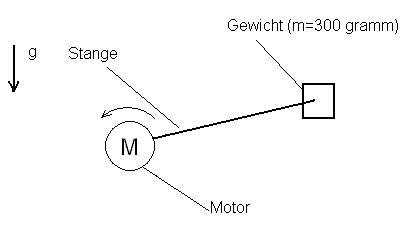
Hallo zusammen, ich recherchiere jetzt schon seit einem Tag und bin immer noch zu keinem vernünftigen Schluss gekommen. Hier mein Problem: Ich muss für eine Projektarbeit im Studium (Maschinenbau, eigentlich scheue ich daher die Elektrotechnik ;-)) ein Modell bauen, das abstrahierte Schema habe ich eben mal in Paint gezeichnet (ging einfach am schnellsten) und als Bild hier angehängt. Eigentlich ganz einfach. Ich brauche einen Motor, der über eine Stange ein Gewicht dreht. Das ganze wird später an der Wand hängen, also wird mal mit und mal gegen die Schwerkraft gedreht. Es gibt zwei Endlagen (links und rechts, Verdrehwinkel ca. 330°), in denen Schalter/Taster angebracht werden können und sollen. Natürlich wird auf der anderen Seite der Stange ein entsprechendes Gegengewicht angebracht, so dass das erforderliche Drehmoment minimiert wird. Der Hebelarm (in der Skizze als Stange vereinfacht) wird allerdings während der Drehbewegung über den Verdrehwinkel in der Länge zwangsweise verändert (DeltaL ca. 40 mm), so dass man den Motor trotz Gegengewicht nicht völlig vom äußeren Moment entlasten kann. Der gesamte Hebelarm (Stange) ist im Schnitt etwa 40 cm lang. Die gesamte Drehbewegung von einer Endlage in die andere sollte ca. 5 Sekunden betragen (wahrscheinlich werden wir daher eine Übersetzung einbauen müssen). Nun das eigentliche Problem: Die Winkelgeschwindigkeit sollte bei der "Abfahrt" nicht auf einmal stark zunehmen und das ganze sollte nicht zu teuer sein (<150 €, gerne billiger). Schön wäre auch noch eine kurze Ruhezeit in den Endlagen, ansonsten ständiger automatischer Richtungswechsel (wie realisiert man das am einfachsten?). Schrittmotor hat ja soweit ich weiß ein hohes Haltemoment, das wäre für die gleichmäßige Bewegung also super sein, allerdings ist mir die gesamte Steuerung etwas suspekt und besonders günstig scheinen die Dinger auch nicht zu sein. Das müsste ja dann irgendwie programmiert werden. Einen DC Servomotor fände ich schon viel besser, da man dort (soweit ich weiß) die Steuerung komplett analog aufbauen könnte. Allerdings weiß ich dort nicht, wie sehr sich die Schwerkraft bei der Abwärtsbewegung auf die Winkelgeschwindigkeit auswirken würde (Wegen Übersetzung sollte der Effekt allerdings kleiner als bei direktem Hebel werden). Wie würde ich das Ding ansteuern müssen. Reicht da eine H-Brücke? Kann man da noch auf einfach Art und weise eine kurze Ruhezeit in den Endlagen realisieren? Brauchen wir unbedingt Schalter oder geht das auch mit Tastern? Ich hoffe ihr könnt mir helfen, steh da nämlich gerade echt auf dem Schlauch, vielen Dank schon mal für eure Mühe! Falls noch irgendwelche Fragen offen sind, bitte bescheid sagen :-). Gruß Klaus
Angehängte Dateien:
-

Schema.GIF
2,6 KB
moin moin, was willst Du mal studilieren...Maschinenbau? Dann liefer wenigsten genaue Angaben über die Kräfte, Drehmomente usw. Erst dann kommt die Frage nach "welcher Motor"... Sonst nimm einfach einen Scheibenwischermotor, der macht auch hin und her...und Kraft hat der auch. mfg Pieter
Nicht wollen, ich studiere schon und werde nächstes Frühjahr fertig sein. Ich weiß, mit den deutschen Ingenieuren gehts bergab ;-). Aber jetzt mal im Ernst: Hatte auch glaube ich alle wichtigen Angaben schon gemacht, aber dann werde ich sie hier noch mal kurz zusammenfassen. durschnittlicher Hebelarm: 400 mm. Gewicht = 0,3 kg => Drehmoment auf Motor bei horizontalem Hebelarm etwa 1.2 Nm, allerdings soll dieses ja über ein Gegengewicht ausgeglichen werden. Veränderung des Hebelarms während der Bewegung um ca. 40 mm, als mal 20 mm länger und mal 20 mm kürzer als der "normale" Hebelarm. => Bei 20 mm längerem Hebelarm hat man ein Moment, was um ca. 0,06 Nm (=6 Ncm) größer ist, als das "reguläre" Drehmoment. Dieses müsste durch den Motor gehalten und bewegt werden. Mir ist übrigens völlig bewusst, dass es sich dabei um Momente im Stillstand handelt. Da die genauen Winkelbeschleunigungen und somit die genaue Zeit, die das Ding für die Umdrehung braucht, aber zweitrangig sind, hielt ich es für Überflüssig, irgendwelche Trägheitskräfte oder Drehmomente bei dynamischer Bewegung auszurechnen. Mir ging es erstmal darum, was genau einfacher zu steuern ist. P.S.: Ein Scheibenwischergetriebe hat prinzipbedingt beschränkte Schwenkwinkel, das kommt für unsere Zwecke daher leider weniger in Frage. Also nochmal: Mir geht es hauptsächlich um eine einfache und billige Steuerung bei Erfüllung der Vorgaben (Sensorik, Ruhezeit in Endlagen?) :-).
Das mit dem Schneckengetriebe ist schon mal ein super Einwand, da hätte ich in der Tat auch selbst drauf kommen können. Wie sieht das denn mit der Steuerung aus. Reicht da eine einfach H-Brücke? Kann man irgendwie auf einfachem Wege Ruhezeiten in den Endlagen realisieren? Brauche ich unbedingt Schalter mit Relais oder kann man die Schaltung auch irgendwie so modifizieren, dass man Taster verwenden kann? Hat jemand konkrete Beispiele, wo man entsprechende Taster/Schalter bekommt, gegen die man einfach zum betätigen mit einem Bauteil "anfahren" kann? Also, quasi ein Druckschalter statt Kippschalter mit niedrigem Einschaltdruck, keiner zum draufdrücken mit dem großen Daumen. Vielen Dank :-)!
Du hast noch nicht alle Angaben geliefert, weil Du das ganze nur statisch betrachtet hast. Beim Anlaufen wird die Masse beschleunigt, das erfordert ein zusätzliches Moment. Selbst wenn Du die Masse mit einem Gegengewicht statisch kompensiert, beim Beschleunigen hast Du dann die doppelte Masse. In der Endstellung, was soll dort passieren? Muß dort eine Kraft ausgeübt werden. Beim Stoppen muß die Masse abgebremst werden. Wieviel Zeit, bzs. Weg steht zur Verfügung? Welche Bremsmomente ergeben sich dadurch? Allgemein kann man sagen, dass sich ein Schrittmotor gut eignet für langsame Bewegungen, so wie deine. Aber ein Schrittmotor mit 2-3 Nm ist nicht mehr so klein und vielleicht brauchst Du eine Rampe zum Beschleungigen. Ein Servomotor ist eine teuere Lösung, wenn Du von einer H-Brücke träumst, dann ist das ein normaler, bürstenbehafteter DC-Motor. Der läuft nie so langsam. Schau Dir einmal die Drehzahlbereiche von Schrittmotoren und DC oder Servo-Motoren an, und dimensioniere ein Getriebe für das Ganze. Ein wichtiger Punkt kann auch die Lebensdauer sein: Schrittmotoren und richtige Servomotoren leben lange (20.000 h), bürstenbehaftete DC-Motoren nur kurz, wenn sie dauernd laufen. Schau dir aber trotzdem die kleinen Servo-Motoren mit intelligenter Steuerung an oder intelligente Schrittmotoren an. Diese haben manchmal Eingänge und sind programmierbar, damit kann man solche Sachen leicht erschlagen. Mit Kosten um 500-1000 Euro mußt Du aber rechnen.
Hallo Klaus und vielen Dank für deine Antwort. Das mit den Trägheitskräften ist mir wie gesagt durchaus bewusst. Also nochmal etwas mehr Hintergrundinformation: Das ganze soll ein automatisches Modell von einem sogenannten Quadreieck werden. Animation seht ihr hier: http://en.wikipedia.org/wiki/Henry_Dudeney Unseres soll natürlich nicht durchlaufen, sondern einfach nur eine Hin-/Her-Bewegung machen. Allerdings muss das gesamte Ding wirklich nicht schnell beschleunigt werden und der Steiner-Anteil ändert sich wegen des Abstandes der einzelnen Teile zum Drehpunkt auch ständig, daher habe ich das gesamte Modell einfach grob abstahiert. Wir werden eine Grundplatte haben, auf der die Teile in Nuten geführt werden. Unter die Grundplatte wollen wir kleine Industriestoßdämpfer (von ACE o. ä.) montieren, welche die Bewegung einige cm vor erreichen der Endlage zusätzlich abbremsen, das sollte also nicht das Problem sein. Bleibt also noch die Anfahrbeschleunigung als Faktor, diese muss aber wie gesagt nicht hoch sein, hauptsache das Ding bewegt sich. Ganz wichtig ist, dass der Motor+Steuerung auch im finaziell vertretbaren Rahmen bleiben. 500 bis 1000 Euro überschreiten leider einfach das Budget, maximal 150 bis 200 Euro sind leider angesagt. Die Idee mit dem Schneckengetriebe finde ich da auch sehr gut. Lebensdauer von etwa 10.000 h wäre schön und ausreichend. Kann man grob sagen, wie hoch die Lebenserwartung eines bürstenbehafteten Motors wäre? Und nach wie vor die Frage, ob man auf analogem Wege irgendwie eine Schaltverzögerung basteln kann, so dass erst einige Sekunden nach tatsächlichem Berühren des Endlagnschalters das Signal tatsächlich umgeschaltet wird :-)?
Hallo Klaus! Das Problem sollte mit einem Schrittmotor, der 1,6-2,5Nm liefert, schnell und günstig zu lösen sein. Da du von Elektronik nicht allzuviel Ahnung zu haben scheinst, würde ich zum Motor eine passende, fertige Endstufe kaufen. Dann bleibt dir immer noch die Programmierung eines Mikrocontrollers für die Steuerung des geforderten Ablaufs. Ob die Endstufe Takt-/Richtungseingänge hat (der Quasistandard), oder ob du was nimmst, was schon Fahrbefehle verarbeiten kann, ist dann geschmackssache. Mit freundlichen Grüßen Thorsten Ostermann
Zu den Servomotoren: Die können sehr wohl langsam laufen. Meine CNC-Fräse macht auch nur 1 mm / Minute wenn sie soll. Und das ohne Übersetzung. Dafür mit bürstenbehafteten DC-Servos die nicht alle Daumen lang verschlissen sind (der größte Servo hat etwa 4kW und wiegt 82kg :-)) ). Nur brauchen Servomotoren eine Positions-Rückmeldung. Und damit wirds automatisch teuer. Halbwegs billig ginge es noch mit einem UHU-Servocontroller, der kommt auf etwa 150.-, dann fehlt aber immer noch die Ansteuerung (Rampen, Weg, Endschalter). Schrittmotor ist richtig dafür. Beim großen C gibts Controller die sich programmieren lassen (WIMRE) mit Chips von Trinamic (? Triamic?). Die können Rampen und Wege und würden mit einer minimalen Steuerung auskommen. Gruß, Nick
als bastler würde ich das problem ja mit einem starken modellbauservo lösen. die sind nicht allzu teuer und einfach anzusteuern (PPM) als Achse würde ich den nicht verwenden sondern eine richtige achse verwenden, auf die ich dann nur die kraft des servos übertrage. kleiner µC der die steuerung übernimmt kann auch das kurze warten erledigen.
Bauteile: http://www.modellbau-friedel.com/Servo+DS+14021+BB+5170.htm http://wiki.rc-network.de/Graupner_DS_14021_BB https://www.watterott.com/Arduino-Duemilanove Lib: http://www.arduino.cc/playground/ComponentLib/Servo Dann gibst Du dem Servo einfach bescheid wo er hinfahren soll Endtaster sind nicht nötig.
Vielen Dank für die weiteren Antworten. Ich war fast davon ausgegangen, dass ein Schrittmotor die optimale Lösung ist, allerdings kenne ich mich mit der Peripherie leider gar nicht aus. Also, wenn ich das richtig verstanden hab, braucht man auf jeden Fall eine Steuerkarte und dann jenachdem noch ein Interface, um den Mikrocontroller über den PC zu programmieren? In C++ und C war ich mal ziemlich fit, das sollte also nicht das Problem sein. Würde beispielsweise einer dieser 3 Artikel meinen Anforderungen genügen? http://www.conrad.de/goto.php?artikel=198087 http://www.conrad.de/goto.php?artikel=190841 http://www.conrad.de/goto.php?artikel=967599 Noch zwei wichtige Sachen: 1.) Das Modell soll danach autonom laufen, sprich der Schrittmotor muss dann auch ohne angeschlossenen Rechner wissen, was er tun soll. Außerdem muss das ganze dann natürlich auch über ein Netzteil laufen können, aber das sollte ja kein Problem sein. 2.) Das Modell wird am Anfang und Ende des Tages ein- und ausgeschaltet, auch wenn es mal nicht in einer Endlagenposition ist. Weiß die Steuerung dann beim Einschalten immer noch, in welcher Stellung sich der Motor befindet oder gibt es da Probleme? Nicht, dass der Controller den Motor dann erstmal souverän und zügig gegen die Endlage fährt, weil er denkt, dass er noch am Anfang der Bewegung ist. Die gleichen Fragen gelten natürlich auch für den Vorschlag von Hans. Wenn das mit dem Servo und der Karte so funktionieren sollte, wäre das auch eine gute Sache. Aber wie sieht es da mit dem ein- ausschalten bzw. der Lageerkennung aus (siehe oben)? Wenn ich das richtig gesehen habe, könnte ich bei der Lösung auch nur den Stellwinkel des Servos angeben, auf die Drehzahl kann ich also nur über ein Getriebe Einfluss nehmen? Oder kann ich dem Servo auch sagen, über welchen Zeitraum er den vorgegebenen Drehwinkel einstellen soll? Danke und Gruß Klaus
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.