Hallo, ich habe hier einen mittelgroßen RC-Jeep und wollte diesen soweit umbauen, dass er von einem AVR statt der Fernbedienung gesteuert wird. Momentan hat noch der LM-406-FB Fahrtregler das Sagen. Meine Überlegung ist, diesen Fahrregler entweder soweit zu modifizeren, das mein uC die Kontrolle übernimmt und die Motorentreiberschaltung des Reglers verwendet. Oder man spendiert eine komplett neue Leistungsstufe, die dann vom AVR angesteuert wird. Was wäre denn weniger aufwendig? Welche Schaltung würdet ihr im zweiten Falle empfehlen? Es handelt sich dabei um folgendes Modell, kaufbar beim großen C: 231640 - 62 http://www.conrad.de/goto.php?artikel=231640 Gruß Sebastian
Hallo Sebastian, einen Fahrtenregler (eigentlich ist es nur ein Steller) wird genau gleich wie ein Servo angesteuert. Also mit Impulsen der Länge 1,5ms bis 2,5ms. 1,5ms entspricht: Vollgas vorraus 2,0ms entspricht: Stop 2,5ms entspricht: Vollgas rückwärts Suche einfach nach "AVR + Servo" Für die Lenkung wirst Du das Selbe eh nochmal brauchen. MfG Ulli
Angehängte Dateien:
-

fahrtregler.jpg
300 KB
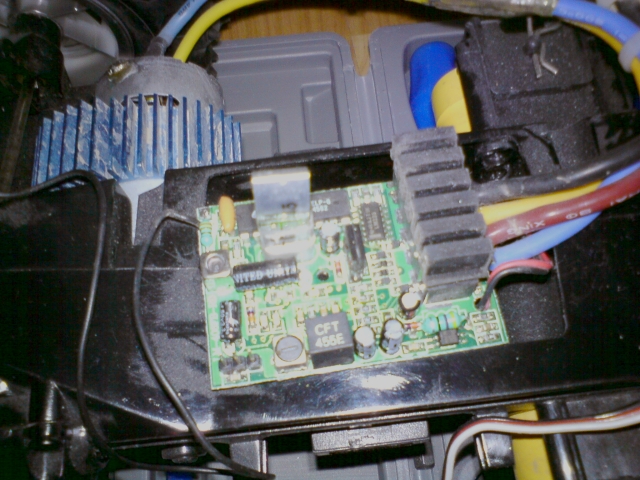
Bei dem Jeep gibt es nur den eine Elektronikbaugruppe (LM-406-FB), hier ist die Funkdekodierung, Servo-Lenkungs- und Motor-Ansteuerung untergebracht. Das macht es einwenig schwer sich da irgendwie zwischen zumogeln (siehe Foto).
es gibt drei ICs auf der Platine, zwei oben, einer unten Oberseite: der sich hinter dem Quarz ganz hinten befindet, ist ein: - EM78P156ELP, Anzahl Pins: 18 neben den Leistungstransistoren befindet sich ein: - LM339 Anzahl Pins: 14 Unterseite: auf der Unterseite ist ein IC, bei dem ein Teil der Beschriftung entfernt worden ist, man kann nur noch folgende Nr. ablesen: - 30305043 Anzahl Pins: 24
hier noch die Links zu den Datenblättern: EM78P156ELP - 8-BIT MICRO-CONTROLLER - ELAN Microelectronics Corp http://pdf1.alldatasheet.com/datasheet-pdf/view/60152/EMC/EM78P156ELP.html LM339 - Low Power Low Offset Voltage Quad Comparator http://www.national.com/ds/LM/LM139.pdf
Also da würd ich ehrlich gesagt die Elektronik rausrupfen und selbst was basteln. Hab das grad hinter mit mit einem ferngesteuerten Kettenfahrzeug und da war auch nix sinniges mit anzufangen.
Das wird wohl der einfachere Weg sein. Reicht bei dem 540er Motor eine einfache H-Brückenschaltung mit 4 Mosfets oder muss man da ein bissl mehr Knoff-Hoff auspacken?
Leider gibts zu dem Motor von dem Conrad-Ding kein Datenblatt. Das hier könnte ein erster Anhaltspunkt sein: http://www.ansmann.de/cms/de/racingroot/engine/electric.html 12A bei 7,2V, nicht schlecht.
moin http://www.elektor.de/jahrgang/2007/juli/zbot-10-a-power-stufe-fur-dc-motoren.196823.lynkx Gratis download mfg
Du willst ja nen "RoboJeep" basteln also wäre wohl auch www.roboternetz.de für Dich sehr interessant. Die dort vorgeschlagenen "Standards" halte ich für echt sinnig. Und im entsprechenden Shop www.shop.robotikhardware.de gibt es auch entsprechend fertige Motortreiber- Boards wenns Geld nicht drückt.
Die Funktion des Controllers dürfte klar sein, der LM339 wird wohl als H-Brückentreiber missbraucht. Das IC auf der Unterseite ist der Tuner/Demodulator. An einem Punkt des Controllers müßtest Du die Pulsfolge von der Fernsteuerung "sehen". Also ohne Oszi wird das natürlich schwierig :-( Langer Puls = Startpuls. Folgende Pulse: Pulsbreite der einzelnen Kanäle. Diesen Punkt täte ich abklemmen, da kannst Du das Fahrzeug am einfachsten übernehmen. Mußt halt die Puls simulieren, wobei kritisch die Pulsbreite ist, jedoch nicht der Pulsabstand.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.