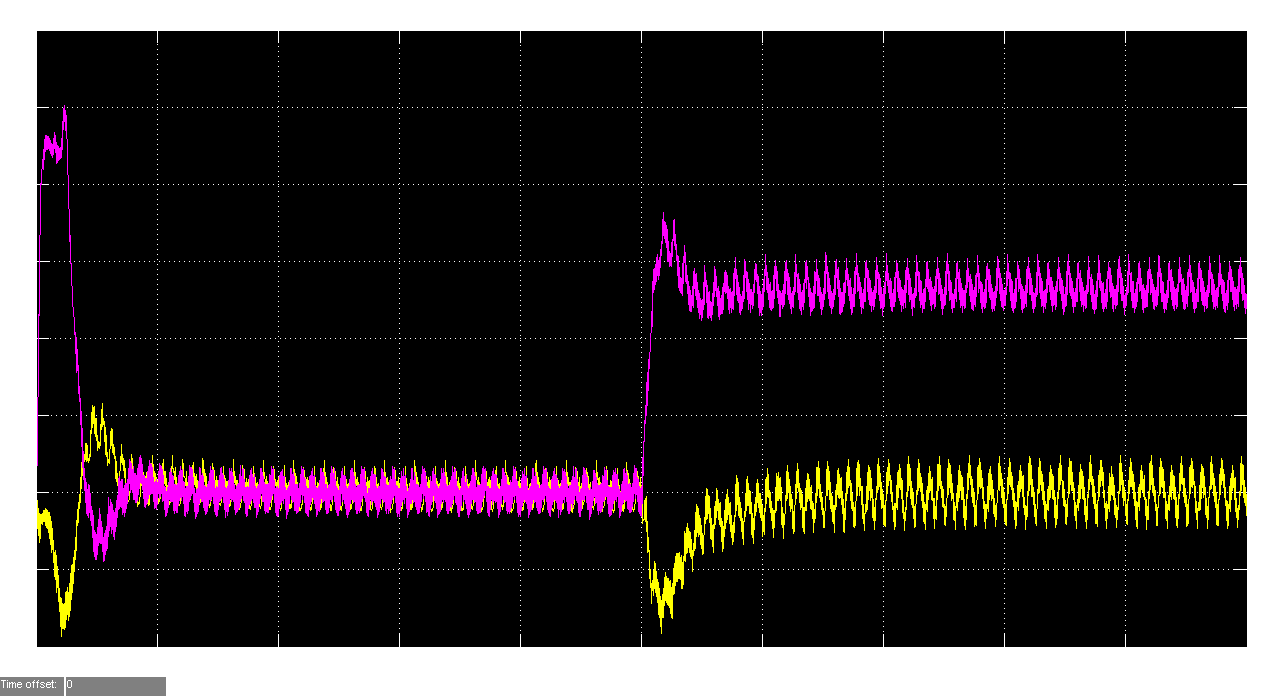
Hallo Zusammen, Für Drehfeldmaschinen mit sinusförmigem am Umfang verteiltem Feldverlauf wären stationär sinusförmige, in Amplitude, Phasenlage und Frequenz einstellbare Umrichterausgangsspannungen (und -ströme) ideal. Der zweistufige U-Wechselrichter kann diese aber nicht stetig, sondern nur in ihrem zeitlichen Mittel durch abwechselndes Anlegen des positiven und negativen Zwischenkreispotentials an die Statorklemmen der Drehfeldmaschinen einstellen. Solche Schalthandlungen ergeben gepulste Ausgangsspannungen, welche neben den gewünschten Verläufen nicht zu vernachlässigende Lastspannungs- und Laststrom-Oberschwingungen verursachen. Bei Stromistwerterfassung sollten die miterfaßten Stromoberwellen (Siehte Abb.)durch TP-Filter unterdrückt werden. Weißt jemand hier, wie kann man den TP dimesionieren? Gruß!
Angehängte Dateien:
-

Id_Iq_Istwert.png
12 KB
Welchen Tiefpass willst du denn dimensionieren? RC? LC? aktiv? Wie stark willst du die Überlagerung denn gedämpft haben? Was passiert mit dem Signal nach der Filterung? Welcher Phasengang ist erlaubt? Welche Frequenz hat die Überlagerung, welche (höchste) Frequenz dein Nutzsignal?
Hi, die Grenzfrequenz des TP sollte etwas höher als die der höchsten an der Maschine anliegende "Frequenz". Sagen wir es wird maximal 50Hz an die Statorwicklungen gelegt dann sollte die Grenzfrequenz des TP >= 50 Hz sein. Gruß BlabLa
fg=50Hz?
Hello again, wie ich leider zuspätauf dem Diagramm gesehen habe hast du es wohl nicht mit SInusförmigen Stromen zu tun. Da wird der Kompromis wohl schwiriger werden. Am besten simulierst du das mal mit MatLab oder sowas ähnlichem. Da der Motorstrom fast Rechteckförmig scheint würde ich es mit dem mehrfachen des Rechtecksignals versuchen. 3 fach, 5 fach usw. Schau halt wo du den besten Kompromis hast. Gruß BlabLa
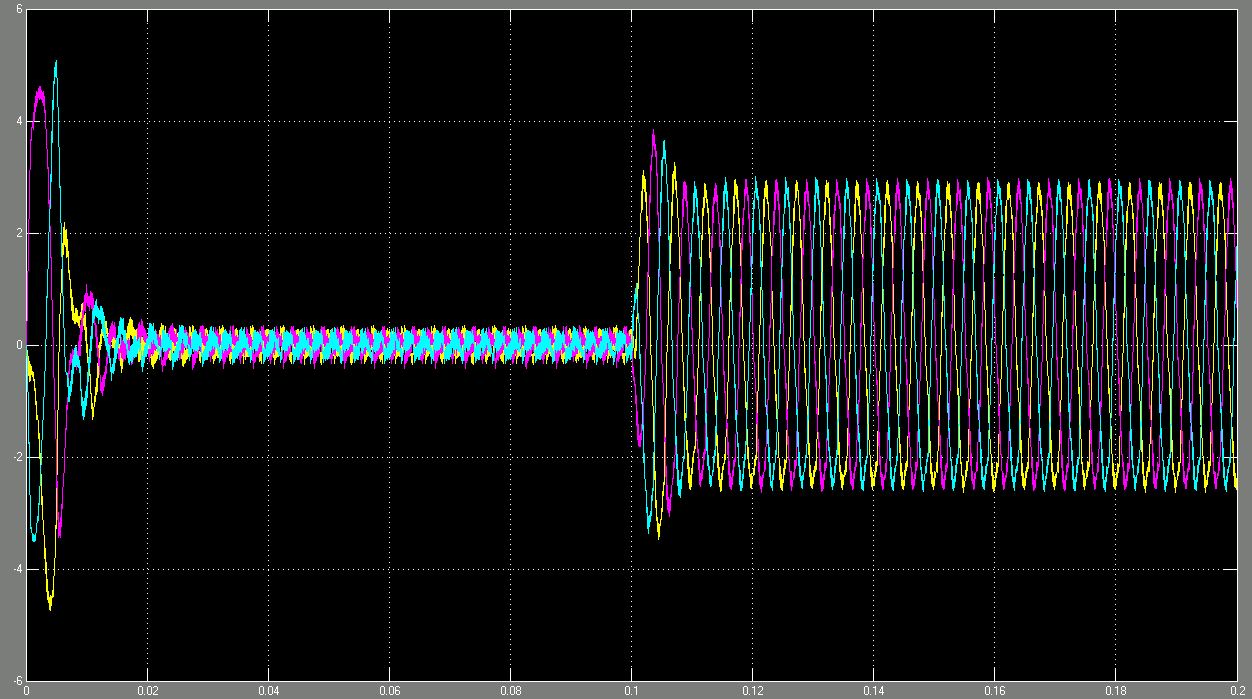
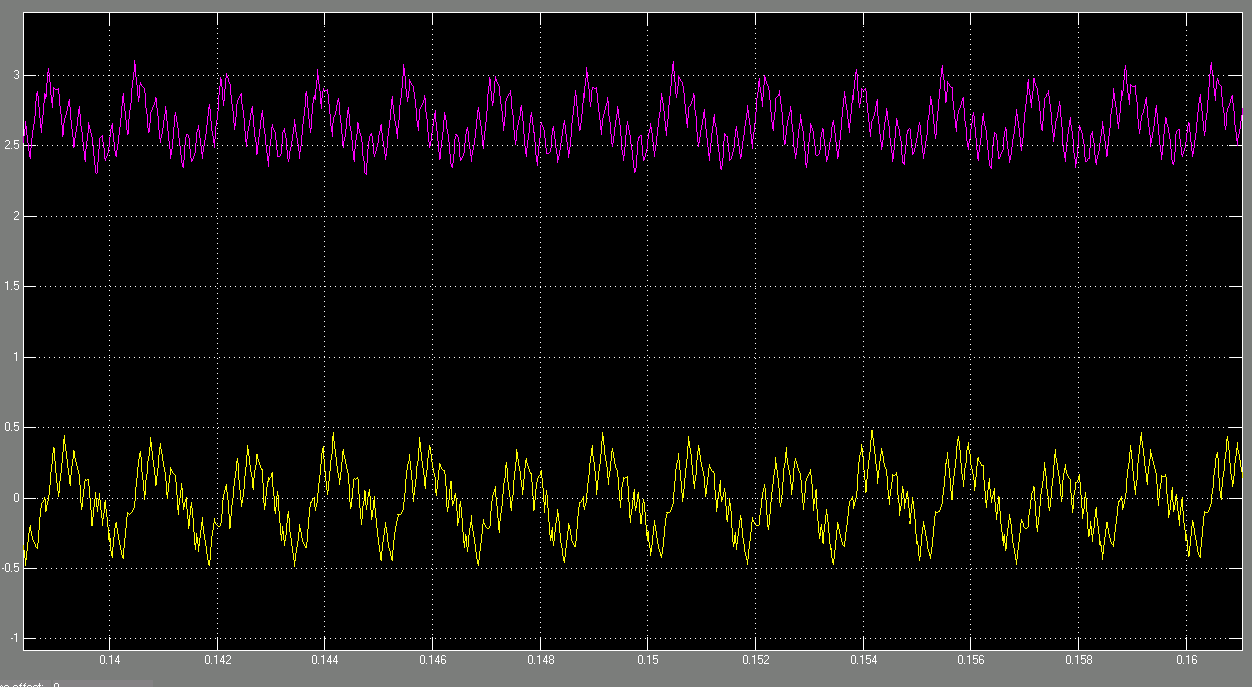
hi, danke vorerst für die Antworten! ich kann nicht so gut die Dimensionierung eines Filters. Was ich jetzt weiß sind: ## Wegen Einsatz des PWM gesteuerten U-Umrichters sind die Ströme Id,Iq sehr wellig.(Siehe Abb. oben,Ordinatenachse:-2 ~ +6 Ampere, Abszissenachse:0 ~ 0.2 Sekunde) ## im Datenblatt der Maschine finde nur die Nenn-Frequenz 200 Hz( ist diese die höchsten an der Maschine anliegende "Frequenz"? ),Maximal Drehzahl,Polzahl usw. reicht es die obigen Infomationen,ein TP zu dimensionieren? oder fehlt noch was? ich möchte eigentlich einen TP dimesionieren,um die Oberschwingungen so gut wie möchlich zu unterdrücken. RC oder LC ist mir egal. ich weiß auch nicht,welche Frequezen die Oberschwingungen haben.sind sie erkennbar in der Abb. oder müssen sie nochmal bestimmt werden? danke! Grüße!
Angehängte Dateien:
-

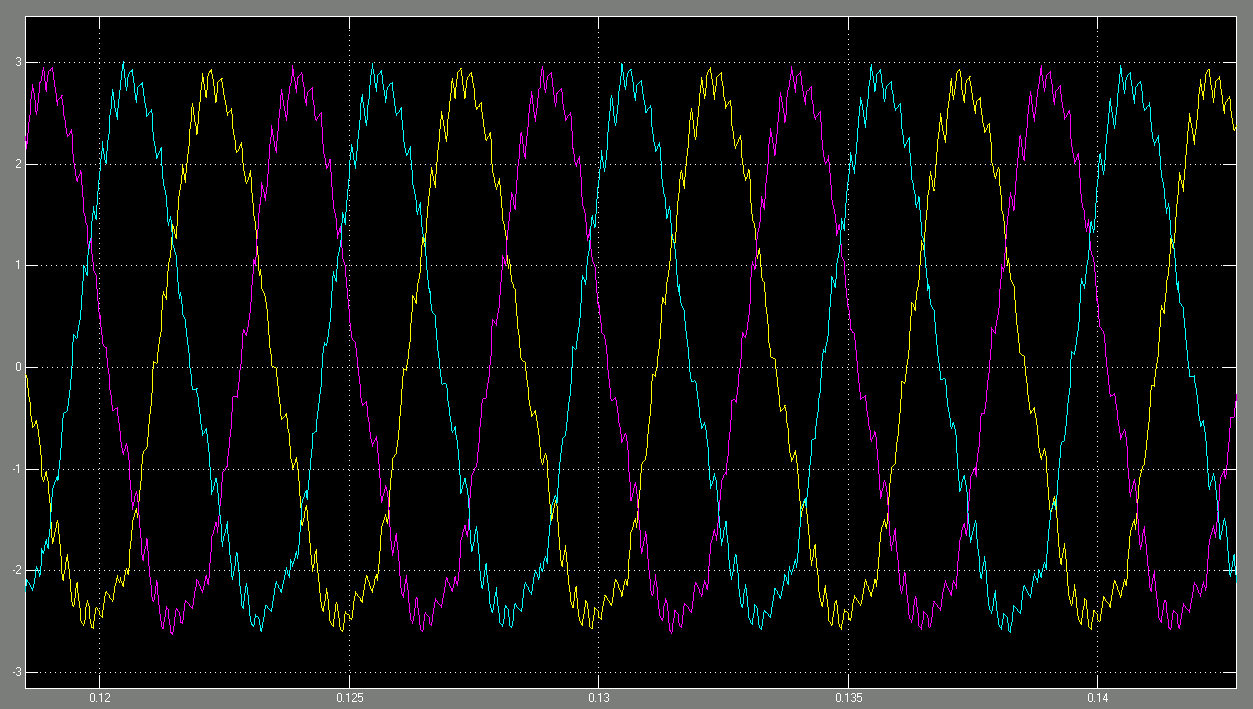
ia_ib_ic.PNG
16 KB -

ia_ib_ic_2.PNG
15 KB -

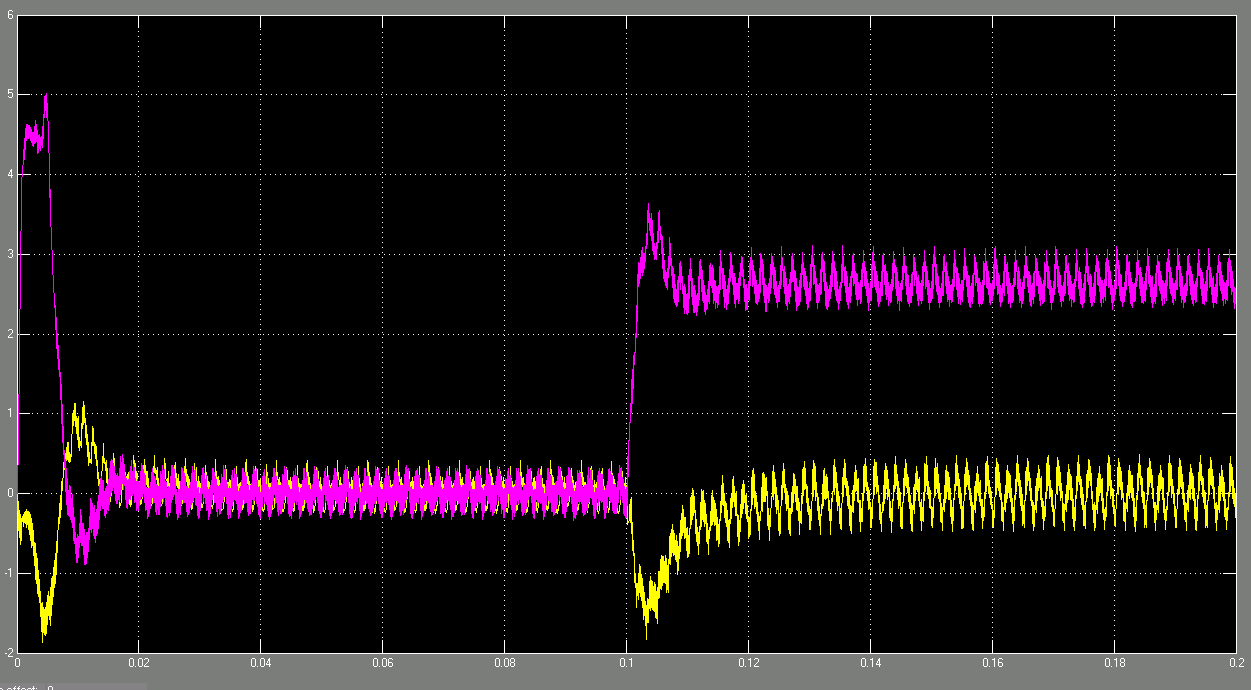
id_iq.PNG
13 KB -

id_iq_2.PNG
13 KB
hi BlabLa, kannst du nochmal ihs Detail gehen? was meinst du denn "mit dem mehrfachen des Rechtecksignals versuchen"? danke Gruß
Hi, also die Frage ist wie schnell soll sich der Motor denn maximal drehen. Brauchst du den vollen Bereich bis ca. 12000 umdrehungen pro minute. Andere Frage ist ob du den Motor mit konstanter Drehzahl oder variabler Geschwindigkeit betreiben möchtest. Für alle diese Anwendungsgebiete gibt es verschiedene Optimale Lösungen. Noch eine grosse Frage ist ob du einen digitalen Filter oder analogen Filter verwenden möchtest. Zur Frage mit der Nennfrequenz. Es ist meistens möglich einen Motor mit höheren frequenzen als die Nennfrequenz zu betreiben, dabei darf aber nie die Nennleistung überschritten werden. Dass heisst die die Spannung wird bei steigender Frequenz verringert. In der Regel fällt die Spannung Quadratisch im verhältnis zur steigenden Frequenz. Dies gilt aber nur ab der Nennfrequenz. Ich denke du solltest noch ein paar konkretere Angaben zum Anwendungsgebiet geben. Gruß BlabLa
Hi, Das Signal was du anscheinend gefiltert haben willst ist wohl iq,id. Für mich sieht das ein wenig aus wie ein Rechtecksignal welchews mit einer hochfrequenten schwingung überlagert ist. Ein Rechtecksignal kann man ja nach Fourier in eine Reihe aus Sinusschwinugungen zerlegen. Wenn ich es richtig in erinnerung habe ist es bei einem rechtecksignal sowas wie faktor * grundschwingung + faktor2 * 3 fache grundschwingung + faktor3 * 5 fache grundschwingung + .... Wobei die Faktoren mit Steigender Gliedzahl immer kleiner werden. Sagen wir du wendest erinen Tp mit der grenzfrequenz von der 9 fachen grundschwingung deines Rechtecksignals an, dann wirst du feststellen das dein Rechtecksignal nicht mehr so eckig ist sondern leichte rundungen hat. Das heisst um so höher deine grenzfrequenz vom filter ist, um so besser kommt das rechtecksignal durch. Nun kommen wir zum hochfrequenten überlagerten schwinngen. Für mich sieht das in etwa aus als ob das midestens mit faktor 60 höherer frequenz schwingt. Das heisst im endeffekt das du nun ein kompromis eingehen musst, um so tiefer die grenzfrequenz des filters liegt um so mehr werden die hochfrequenten schwinnungen mit dem das rechtecksignal überlagter ist gedämpft. Das ist ja gut und gewollt, aber das problem ist das im selben masse auch das Rechtecksignal "die ecken" geglättet werden. Ich hoffe ich konnte die sachlage dir ein wenig verdeutlichen. Gruß BlabLa
ok, ich dimesioniere einen feldorientierten Drehzahlregelkreis für eine PMSM. das Solldrehzahl ist 3000/min. mit den Polpaarzahl p=4 d.h. w_mech=100*pi rad/s,so bekomme die obien Diagramme für die Ströme. eigentlich habe schon sehr gut Ergebnis bekommen,die Abweichung liegt bei etwa 0.2%(simulationsergebnis mit Simulink).aber wie gesagt,wegen Einsatz des PWM gesteuerten U-Umrichters sind die Ströme sehr wellig,so möchte durch einen TP die Oberschwingungen unterdrücken,ich habe noch kein konkretes Konzept,der TP RC oder LC,digital oder analog ist. ich dachte,wahrscheinlich können die Frequenzen der Oberschwingungen mit den obigen Diagramme bestimmt werden.sonst muss nochmal überlegen,wie können sie bestimmt werden. hat jemand wahrscheinlich Erfahrungen,den Stromistwert-Filter zu dimesionieren? oder eine Idee dafür? danke nochmals,BlabLa gruß
hi BlabLa, danke für Ihre Erklärungen. das sieht nicht so einfach aus wie ich gedacht,wenn es um Fourier geht... habe eine Idee:wenn ich die Frequenz der Grundschingung bestimmen kann(wahrscheinlich kann in den Diagramme entnehmen),dann kann ich einen einfachen TP-1.Ordnung mit Grenzfrequenz >= Frequenz der Grundschwingung dimesionieren. Was sagt ihr dazu? Gruß
Ja, klingt gut, aber wie gesagt könnte sein das sie bessere ergebnisse bei einer grenzfrefquenz erreichen. Einfach mal mit simulink vieleicht mal ein rechtecksignal erzeugen und auf diesen eine in der amplitude sehr viel kleinere mit der ca 60 fachen schwingenden Sinusfrequenz draufaddieren. Für mich sieht das signal in etwa nach sowas aus (Das leichte überschwingen am anfang nicht mit berücksichtigt). Daran kann man dann denke ich die wirkung des filters gut simulieren und ausprobieren und ohne grossen aufwand an den parametern des filters spielen. Gruß BlabLa
Hey, für die Glättung des Ausgangssignals eines Frequenzumrichters gibt es sowas als fertige Lösung, nennt sich Sinusfilter. Du solltest mal nach Datenblättern suchen, eventuell findest du da etwas über die Dimensionierung. Gruß
Zur Unterdrückung der Auswirkung von den Oberschwingungen (in dem Regelkreis)haben wir viele Maßnahmen, wie z.B. Ausgangsfilter der Frequenzumrichter, Erhöhung der Taktfrequenz, oder Istwertglättung durch TP, letztere findet man häufig in den Literaturen über Antriebstechnik, aber leider immer keine Erklärung, wie den TP dimensioniert werden kann. Mein Schwerpunkt ist Auslegung des Regelkreises, deswegen möchte eigentlich nicht viel Zeit in der Dimensionierung des TPs investieren. Ich hoffe, jemand die ähnliche/ praktische Erfahrung hat kann mir zeigen, wie dies realisiert werden kann oder wo ich den Lösungsweg finden kann. Danke nochmals für BlabLa’s Hilfe, ich werde mal mit deinen Tipps ausprobieren . Grüße!
Hallo kim, ist zwar schon eine Weile her aber mich würde interessieren wie weit du mit deinem Reglerentwurf bist und ob du eine Lösung für dein Problem mit dem TP gefunden hast. Falls nicht kann ich dir eventuell doch noch bei der Lösung behilflich sein. Gruß Wilfried
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.