{kind=link}
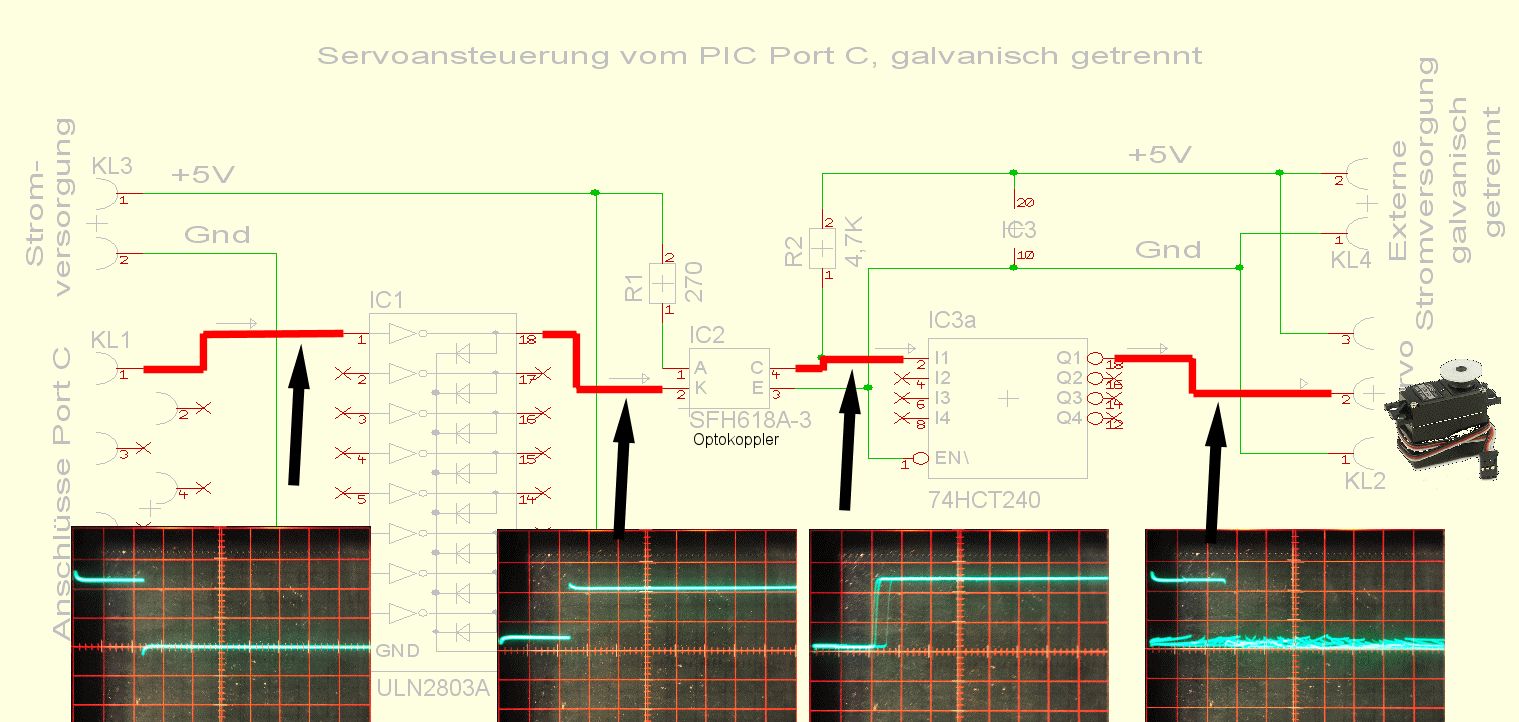
Hallo Community, habe mir auf meinem Breadboard ein Interface zusammengesteckt, das mir vom PIC, Port C ein servogerechtes Signal (dutycycle 20ms, puls 1,5ms) über einen Optokoppler auf das Servo überträgt. Das Servo tanzt Tango, wenn ich's einschalte. Mit dem Scope habe ich an 4 Meßpunkten das Signal überprüft; lediglich am letzten habe ich in der Nullinie ganz viele wirre Störungen, die das Servosignal unbrauchbar machen. Was mache ich falsch? Hab' auch schon einen 4k7 zwischen Servosignal und Gnd gelegt, bringt nix. Bitte um Tipps und vielen Dank dafür !! Rudi aus Wien btw: wenn ich das Servo direkt am Port C anhänge, läuft es wunderbar! Aber aus Sicherheitsgründen muß ich es galvanisch vom µP trennen.
Angehängte Dateien:
-

Servointerface.gif
160 KB
Die unbenutzten Eingänge vom HCT240 nicht offen lassen und einen Abblockkondensator über die Spannungsversorgung vom IC hängen. Murkser
Murkser schrieb: > Die unbenutzten Eingänge vom HCT240 nicht offen lassen und einen > Abblockkondensator über die Spannungsversorgung vom IC hängen. Meinst Du damit, unbenutzte Eingänge auf Gnd zu legen? Abblockkondensator: welcher Wert, wo anschließen? Die dzt. unbenutzten Anschlüsse werde ich bei Vollausbau mit allen Portsignalen belegen; vorläufig probier' ich nur 1 Servo. (bitte um Nachsicht, es sind meine ersten Gehversuche ;-)
Ja, unbenutzte Eingänge auf GND legen. Und 100nF Keramik direkt über am IC (oder Sockel) über +5V und GND anlöten. Murkser
Rudi schrieb: > Abblockkondensator: welcher Wert, wo anschließen? 100n über die Versorgungspins des IC wenn das nicht hilft, dann kleineren/größeren parallel Deine Störungen kommen schätzungsweise von den Motoren in den Servos. Die verseuchen die Spannungsversorung und durch deinen Treiber-IC schlgen sich die dann auf das Servosignal durch. So gesehen war die Trennung kontraproduktiv.
statt des HTC240 hinter dem Optokoppler einen 74xx14 Schmitt-Triger nehmen
Wozu all die Bauteile nach dem Port-Pin? Das Servo kannst Du direkt an den Port-Pin anschließen. Hat sich in meinen Weichenatrieben tausendfach bewährt :-).
@Karl heinz Buchegger
Also der Co zwischen + und gnd direkt am PC (hatte 100nF MKS und 27nF
Keramik) hat wirklich die Noise weggebracht. Die Eingänge auf Gnd hatten
keine Wirkung gezeigt.
Dummerweise ist jetzt der Ausgangspegel nur mehr ca. 1V (???) Vielleicht
hab ich da was gekillt?
@Kurt Harders
In den Testschaltungen hab ich das Servo direkt am Port betrieben und es
hat super funktioniert aber ich hab' da doch Bedenken wegen
blockierendem Motor, Elektronikproblem usw., weißt Du, wenn da einer
unter der Modellbahnanlage das Kabel mal versehentlich auf 16V hängt,
weil er glaubt....
@einer
> schau Dir mal den "6N137" an ist alles bereits drin.
Werd' ich tun, lt. Datenblatt ist er sicher super. Werde ich auch
probieren.
lg Rudi
Ich habe zwar wenig ahnung von Servos. Im Prinzip was ich gelesen habe. Steckt im Kern ein Getriebemotor. Das würde heisen so vermute ich dein Servo (Getriebemotor) speist nache der abschaltung deine schaltung weiter Induktiv. Bin mir nicht sicher vielleicht könnte eine schnelle sperrdiode mit einem nieder Ohmigen Widerstand in reihe zum abbau der Induktionsspg. helfen. Vielleicht bring dir die platform RoboterNetz etwas. WHE
...etwas Verbesserung bekommst du wenn du R2 auf 10K oder 22Kohm erhoehst. probier mal , kostet ja nicht viel. Die 6N136/7 sind OK fuer deine Anwendung wenn auch etwas luxoioes ;-)
Hallo Community, vielen Dank für die zahlreichen Beiträge!! Zwischenzeitlich funktioniert das Servo "wie ein Glöckchen" und ich bin ganz happy :-)) Grund für die Fehlfunktion war eine falsche Verschaltung der +5V am Breadboard (Steckboard von Conr..). Da gibts ja für die Stromversorgung Va, Vb und Gnd und ich hab wahllos entweder Va oder Vb für die +5V genommen. Naja, man lernt eben immer dazu. Rudi
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.