Hi! Ich beschäftige mich gerade mit Servo-Umrichtern in Verbindung mit permanenterregte Dreiphasen-Synchronmotoren, doch dabei sind einige Fragen aufgekommen. Mal angenommen, die gerade anliegende Spitze-Spitze Spannung des Motors würde genau der ZK Spannung des Umrichters entsprechen (maximal mögliche Drehzahl), und man möchte jetzt den Motor abbremsen. Laut meinen Verständnis würde die Gegen-EMK des Motors nicht ausreichen, um den ZK aufzuladen. Man könnte dann nur den Servomotor gewaltsam abbremsen, indem man ein um 90° nacheilendes Magnetfeld dem Rotor nachschickt, oder entweder high oder low side der IGBTs durchschaltet. In beiden Fällen würde der Motor die ganze kinetische Energie in Thermische umwandeln. Wozu ist dann also eigentlich der Bremschopper bei Servo-Umrichtern gut? Ist der Bremschopper wirklich nur für den Fall da, dass von außen der Motor über die am Umrichter maximal mögliche Drehzahl künstlich beschleunigt wird?
wenn Du den Sollwert aber verringerst, sorgt die Schwungmasse des Läufers und der angelanschten Maschine dafür, dass der Motor schneller dreht als das Drehfeld des Umrichters. Dann steigt die Zwischenkreisspannung und muss in einem Bremswiderstand in Wärme umgesetzt werden. Axel
Ganz vereinfacht gesagt: Wenn du die Strangspannung am Motor über die PWM niedriger einstellst als die EMK, wird sich dieser Anteil zu deiner Zwischenkreisspannung quasi addieren. Eine weitere Möglichkeit ist der Betrieb in Feldschwächung, dann ist die EMK höher als deine Zwischenkreisspannung und selbst wenn du die Endstufe komplett abschaltest, wird eine höhere Spannung anliegen. In diesem Fall ist ein Bremschopper dringend notwendig.
Wenn mehrere Antriebe vorhanden sind, verbindet man die ZKs miteinander, so dass evtl. ein anderer Umrichter die Energie nutzen kann. Oder man speist sie mit einem speziellen Wechselrichter ins Netz zurück. Oder zur Not heißt man Brauchwasser damit. Muss man halt durchrechnen, wie groß die rotierende Masse ist und ob sich der Aufwand lohnt.
Angehängte Dateien:
{kind=link}
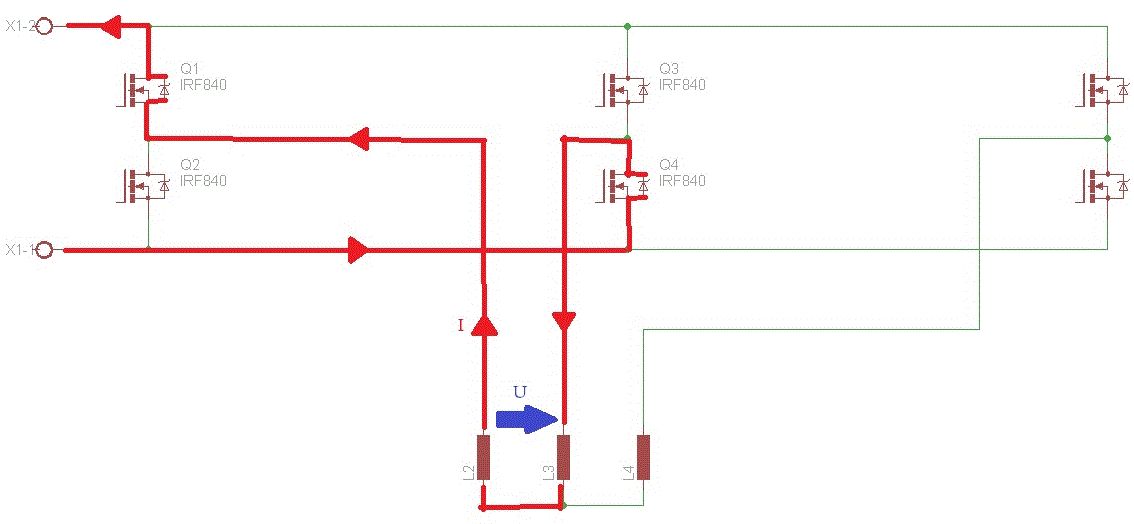
Hui, gleich der Autor vom legendären "Frequenzumrichter mit Raumzeigermodulation" Artikel. In diesem Forum wird einen echt professionell geholfen ^^. Zitat von Stefan L: >Ganz vereinfacht gesagt: Wenn du die Strangspannung am Motor über die >PWM niedriger einstellst als die EMK, wird sich dieser Anteil zu deiner >Zwischenkreisspannung quasi addieren. Wie kann sich die Spannung addieren? Bisher habe ich mir immer gedacht, der einzige Weg des Stromes zurück in den ZK wäre wie im angehängten Bild. Wenn dem jedoch wirklich so wäre, müsste U größer als die ZK sein. Und das ist sie ja nicht, wenn man den Motor nicht von außen über die, mit dem ZK maximal erreichbare Drehzahl, beschleunigt. Aber das scheint ja nicht so recht zu stimmen. Wie schaut also sonnst der weg des Stromes aus, so das sich die Spannungen "Addieren"?
Ist Q4 und Q2 eingeschaltet, baut sich ein Strom in der Induktivität auf. Schaltet dann Q2 ab und Q1 ein, so fließt dieser Strom weiter über den Zwischenkreis. Die Schhaltung kann damit rückwärts als Hochsetzsteller arbeiten.
Ich hab in Zusammenhang mit der ursprünglichen Frage etwas, dass mir aktuell Kopfzerbrechen bereitet. Ich hoffe es ist ok hier rein zuposten... Und zwar frag ich mich gerade, wie denn die "Stop"-Sequenz eines solchen Umrichters aussehen muss. Kann man die PWM hier so einfach von einer auf die nächste Periode abdrehen (sprich keiner der FET leitend), sofern der Bremschopper seine Arbeit verlässlich verrichtet?
Ich denke, die Taktfrequenz wird als Rampe heruntergefahren, und dann arbeitet der Motor als Generator während der Zeit.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.