
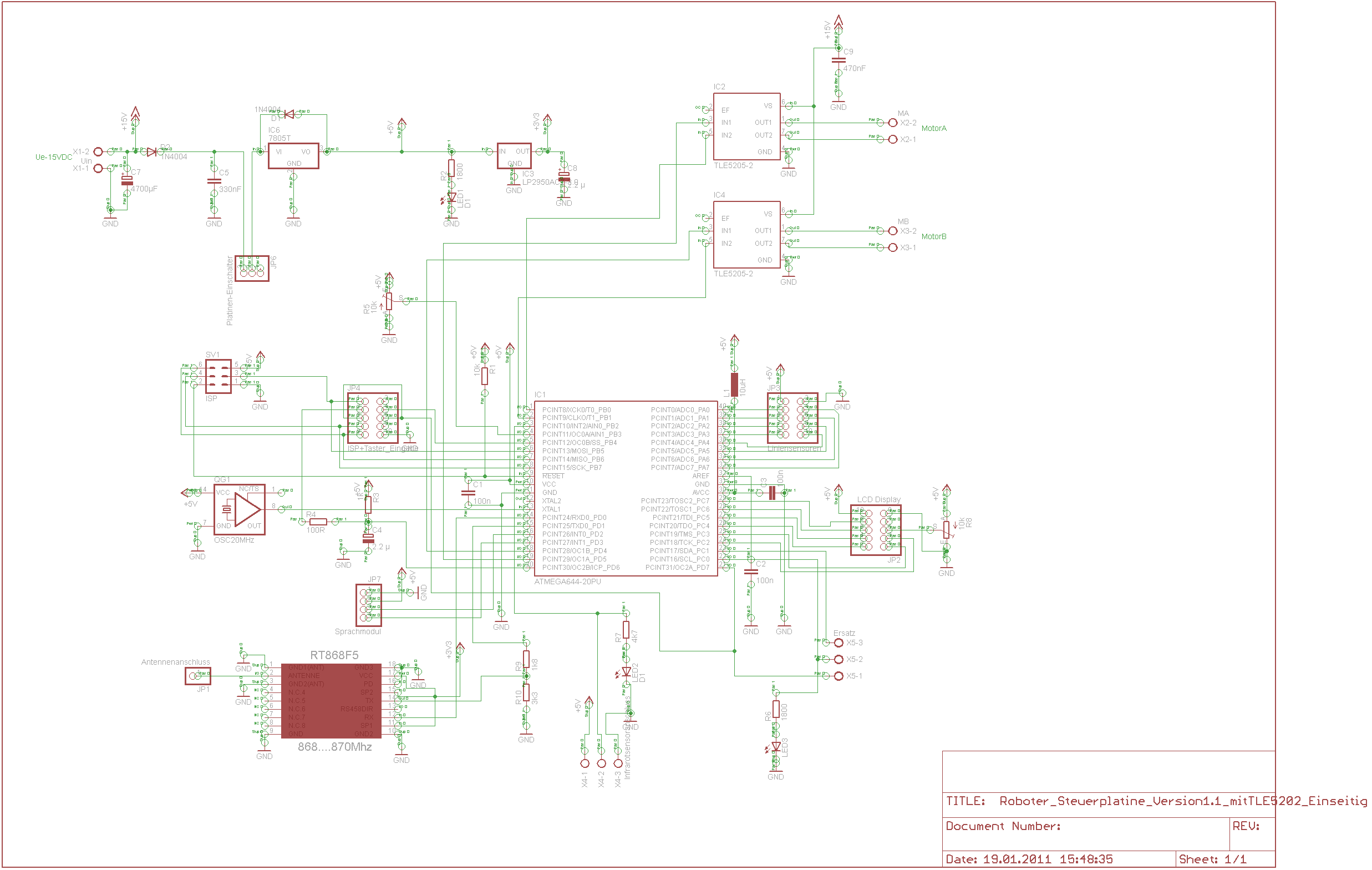
Hallo liebe Kollegen, Ich arbeite zurzeit an einen Roboter der einer Linie nachfährt und wenn sich ein Gegenstand auf der Linie befindet dann ausweicht und wieder auf die Linie kommt. Der Sharp - Sensor liefert mir korrekte Werte wenn ich ihn ausschraube und austeste bzw der Spannungsbereich stimmt auch auf dem Roboter. Auf dem Bild ist zu sehen wie er fixiert ist. Ich werte ihn mit dem Analog Komparator des Atmega644P aus und vergleiche mit Negative AIN mit einen Schwellwert den ich per Poti festlege. Problem ist: Wenn ich den Roboter auf die Linie halte dann weicht er gleich aus ohne vorher zu fahren. Jetzt habe ich die Motoren ausgeschaltet und ich sehe am Display, dass der Sensor keinen definierten Zustand hat, er switcht hin und her wenn er sehr weit weg ist. Wenn ich weiter ran gehe dann spricht er immer an. Und wenn ich aus dem Messbereich gehe dann ist er manchmal 0 und manchmal 1 was ja eig nicht sein darf. Ich weiß nicht wo der Fehler liegt, da ich schon alle Register kontrolliert habe die ich ansteuern müsste. Ach ja, wenn ich den Roboter in der Hand halte und schnell rauf und runter schwenke dann passiert auch irgend etwas, also undefiniert. Was könnten mögliche Ursachen sein ? lg andy
Angehängte Dateien:
-

HPIM2533.JPG
2,1 MB -

schalt.png
47 KB
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.