Hallo alle! Ich möchte mir einen Roboter bauen, den ich über eine Funkdatenübertragung zwischen PC und Roboter steuern will. Den Roboter habe ich schon, jetzt suche ich nach einer Möglichkeit, mit einem kleinen Radioempfänger und einem entsprechenden Sendemodul für meinen PC die Fernsteuerung zu bauen. Ich suche nach Herstellern von entsprechenden Bauteilen. Wer weiss da was ? Danke schonmal. Tilman.
Wäre denn auch eine Infrarot-Steuerung denkbar? dann könntest du es dir mir RC5-Code, und Fernseh-Fernbedienung (oder entsprechende PC-Software) recht einfach machen...
Also Infrarot würde ich nicht empfehlen - außer du willst das dein Robot nur in dem Zimmer funzt in dem Du bist. Ich würde immer noch auf die alt bewährte Methode des Funk setzen - mit dem hatte ich bissher noch nie probleme wie mit IR. RC5 ist ein Protokoll das die Fernbedienungen vom Fernseher verwenden - wenn ich nicht täusche.
vielleicht gibt es für dich viele infos dazu auf www.roboternetz.de insbesondere http://www.roboternetz.de/phpBB2/viewtopic.php?t=4287
OK, also doch Funk. Aber kennst Du denn einen Hersteller, der im Low-Cost Bereich (also sagen wir mal 150-200 Euro für Sender + Miniatur-Empfänger) entsprechende Funk-Datenübertragungssysteme feilbietet ? Danke.
du könntest es mal mit den sendern und empfängern aus dem modellbau versuchen. so hab ichs auch gemacht. nen empfänger von robbe im bot eingebaut und die servosignale am AD wandler in elektrische signale umgewandelt. und das selbe nur umgekehrt am rechner mit den senderbausteinen ...
und wie schauts aus mit Blauzahn (Bluetooth) oder WLAN-Komponenten? Die Sachen bekommt man ja inzwischen nachgeschmissen für "fast nix". Das ist doch auch alles bewährte Technik, genehmigte Frequenzen etc. Und Entfernungsmäßig bekommt man da ja bestimmt auch mehr hin als mit dem IR.
also bluetooth wäre von der anwendung her irre einfach, nur leider geht das ganze nur auf 15 meter. wlan dagegen ist ne super lösung - solange es im haus bleibt und sich auch nicht außerhalb des hauses zu weit entfernt.
Und wie sieht es mit den Empfangsmodulen aus ? Sind die für einen kleinen Roboter von 250g Gewicht ok? Aber die Ideen sind gut. Ich geh dem nach ! Danke.
die aus dem modellbau? ja warum nicht? oder meinst wegen dem gesammtgewicht dann? was wird denn das fürn bot? was hast du für antriebe? musst das gewicht der empfänger ja sowieso zum gesammtgewicht dazu rechnen um die richtige kapazität der antriebe zu wählen. aber im allgemeinen hab ich schon bemerkt das die fertigen empfangsmodule aus dem modellbau um einiges leichter als meine selbstgebauten waren g
Ich hab einen sehr einfachen Laufroboter, der im Moment an einem Kabel hängt. Über zwei einfache Elektromotoren bewegen sich links 3 Beine und das Gleiche passiert rechts. Das Bewegungsprinzip und die Drehungen gehen also wie bei einem Panzer. Bluetooth kenne ich bisher nur mit einem USB Adapaterstück für den PC....Kann ich das irgendwie mit nem D/A Wandler in ein für meine beiden Emotoren verwertbares Signal umsetzen ? Muss ich noch weitersehen, ob das für mch interesaant sein könnte
Angehängte Dateien:
-

hexapod.jpg
20 KB
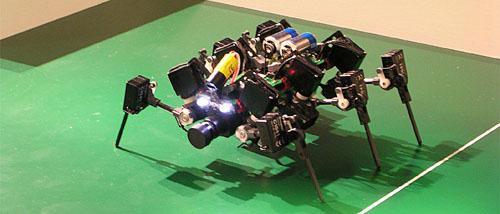
aha - also n hexapod ja? und das funktioniert mit nur zwei motoren? ist das ganze nicht etwas "unbeweglich" also so "ruckelig"? hab mir auch mal so´n teil gebaut allerings brauchte ich pro bein 3 servos damit das ganze sich auch vernüftig fortbewegen konnte. (bild im anhang - einige von euch kennen das teil wahrscheinlich schon) verwenden kannst du dieses übertragungsmedium sehr wohl für deine zwecke allerdings brauchst du dafür keinen a/d wandler - den brauchst du vieleicht grad mal für die ansteuerung der motoren. was verwendest du für motoren? schrittmotoren oder "normale" aber denk dran bluetooth geht gerade mal auf 15 meter!!
Hey, Hey ! Da habe ich ja glatt soviel Respekt, wie der König der Handelskonföderation vor 2 Jedi auf seinem Schiff, bei diesem Hexapod. Sieht echt gut aus, Mann ! Jedenfalls ist der "Hexapod", den ich habe, nur ein Spielzeug. Die beiden Elektromotoren sind keine Schrittmotoren, sondern einfache Gleichstrommotoren, ganz billig. Die Beine lassen sich auch nicht getrennt ansteuern, sondern immer nur 3 auf einmal, also entweder links oder rechts. Ich gucke gerade auf der Homepage der Firma Insys (http://www.insys-tec.de) nach I Modulen. Da könnt ein Schuh draus werden. Die 10-15m Reichweite reichen mir aus.
Danke, Danke hört man doch immer gern :-) Aber ein Spielzeug is meiner auch nur g Die vertreiben WLan Produkte oder?
@JediRitter: Boah....des teil sieht super aus !!! Also meine Respekt bekommst Du auch ! Hast du eine Homepage wo das teil genauer beschrieben ist ? oder gibts dazu ne nachbauanleitung. Wie 3 Motoren / Bein ? Reichen da nicht 2 ? und wo bekommt man billige servos. Ich hab mir gerade fest vorgenommen so ein "Hexapod" nachzubauen. Einfach nur genial die dinger ! MfG
nee hab keine seite dazu sollt ich leicht eine einrichten dafür? ja, 3 servos: einer für die vor-zurück bewegung des beins, einer für rauf runter am gelenk das am "körper" ist und noch einer (der sichtbare) in der mitte des beines. mit der kombination ist es möglich das sich die ganze spinne flach auf den boden legt, sich ganz groß aufstellt, unebene böden meistern kann und völlig naturgeträu (oder zumindest annähernd) bewegen kann. naja die servos waren nicht gerade billig weil der ganze hexapod hat ungefähr die größe einer hand und somit mussten die servos sehr klein und daher teuer werden. sind aber von robbe. ja mich haben diese dinger auch fasziniert und als ich mal ne spinne in der wohnung verfolgt habe ist mir deren bewegung aufgefallen und da dachte ich mir das muss ja irgendwie zum nachahmen sein .... naja im endeffekt bin ich dann bissi mehr als ein jahr an dem trum gesessen - und jetzt nachdem so viel arbeit drinnen steckt habe ich es in einer netten glasvitriene im wohnzimmertisch stehen (hab mir fürn wohnzimmer nen tisch gebaut mit ner plexiglasscheibe in der mitte und auf der unter seite ein kleiner behälter natürlich aus holz - von oben und der seite fallt der behälter nicht auf - den mit sand den ich aus spanien mitgenommen hab aufgefüllt und meine spinne zwischen paar muscheln plaziert g - voll nicht fanatisch hä? lol )

Einfach nur super des Teil...! was macht denn die Kamera? hast du in des ding etwa ne bildverarbeitung rein gepackt oder schickst Du das bild per Funk an PC (etc.) ? Eine weitere Frage, die sich mir gestellt hat ist, des teil über den "blauen Augen"...sieht aus wie ein Laser. Wie steuerst du eigentlich das ding ? auch über funk oder über n festgelegtes progrämmchen ? Nur ne vermutung: der laser und die kamera zusammen messen die entfernung (ob der weg frei ist) ...sitmmts ?? Wenn ja was für ein prozessor verarbeitet die Daten ? Fragen über Fragen...;) Ne kleine HP wär echt super ! Wenn du dir nicht viel arbeit machen willst, dann kannst du ja ne kleine page im wiki einrichten. Gruß
ja, gut erkannt. ist ein linienlaser und zusammen mit der kamera erschafft er eine komplette 3 dimensionale abbildung der umgebung, damit der hexapod dann richtig auf hindernisse reagieren kann in dem er sie nötigen falls umgeht, oder drüber oder drunter kraxelt. allerdings geht die umgebungserkennung gerade mal auf eine entfernung von 12-18 Zentimetern wegen dem Winkel des Lasers. alles über 18 Zentimetern wird ganz normal als bild verwertet. die steuerung ist völlig autonom und wird hauptsächlich von einem programm das am rechner läuft ausgewertet - dort ist im programm auch ein kleines fenster wo in echtzeit das zu sehen ist was auch er sieht (mit ner verzögerung von paar µs aufgrund der übertragung) verarbeiten tut das ein P4 - wie schon gesagt hauptprogramm läuft auf nem rechner. nur das wichtigste wie zb die µC´s zur steuerung der beine und empfänger/sender zur datenübertragung befinden sich am hexapod. als übertragungsmedium hab ich einmal funk zur steuerung vom rechner und der fernbedienung aus. und bluetooth ist gerade im test um ne steuerung vom handy aus zu realisieren.
Hey, Jedi, machst Du eigentlich professionell was auf dem Gebiet Robotik, bist Du Student, Dipl.-Ing, Dr.-Ing, oder gar Prof.-Ing :-)) Wie hast Du eigentlich das digitale Signal aus dem Rechner in ein analoges Signal auf Deiner (Robbe) Fernsteuerung umgewandelt ?
nein, schön wär´s. bin einfach nur ein technischer zeichner mit ner lehre als elektroinstallateur. nichts besonderes also. beschäftige mich rein hobbymäßig mit elektronik und robotik. hab erst kürzlich versucht bei ner firma mich als elektroniker zu bewerben - nur die meinten das ich nicht genügend an erfahrung am elektronik sektor habe und meine qualifikationen nicht deren vorstellungen entsprechen - und das obwohl die nur wen suchen der für sie schaltungen zu den es pläne gibt entwirft ..... also kurz erklärt etwa so: ich schick vom rechner einfach ein digitales signal an den hexapod. und dieser besser gesagt der zweite µC gibt dies über den a/d wandler als servo signal aus - also als analoges (höhe der spannung regelt den ausschlag des servos)
Aha. Und wie wandelst Du das digitale Signal aus Deinem Rechner in ein Funksignal um ? Ich kenne eine Fernsteuerung so (und wenn ich Dich richtig verstanden habe, dann hast Du ja eine Fernsteuerung an Deinen Rechner angeschlossen), dass man ein mechanisches Poti durch verstellen der Steuerknüppel betätigt. Aber aus Deinem Rechner mommt ja nun ein digitales Signal... Das versteh ich noch nicht ganz. Warum übrigens meintest Du vorhin, dass Bluetooth so einfach wäre ? Ich hab ne ganz interessante Website dazu gefunden: http://www.elektronikpraxis.de/fachartikel/druck/ep_fachartikel_druck_485498.html Übrigens: Lass Dich bloss nicht entmutigen. Ich studiere Mechatronik im 10. Semester. Ich sage Dir: Der Hexapod, den Du gebaut hast, der könnte gut als Diplomarbeit in meinem Studiengang durchgehen. Also bei welcher Firma Du Dich auch immer beworben hast: Die haben einen Fehler gemacht, Dich nicht als Elektroniker einzustellen.
naja also ich hab am rechner nen joystick zur fernsteuerung vergewaltigt. mit C++ ein kleines programm geschrieben das die signale auswertet (die zum hexapod und von ihm kommende) jetzt hat jeder ausschlag bzw tastenanschlag vom joystick einen eigenen code bessergesagt eine eigene zeichenfolge bekommen. (zb joystick nach links drücken hat die folge 1111001101001 [war nurn bsp]) diese wird per funk übertragen. wird es vom hexapod empfangen so wird es über I²C zu nem µC geleitet. da in dieser zeichenfolge alle wichtigen daten enthalten sind wie welchen port er ansteuern muss mit welcher spannung, gibt er dies natürlich auch so aus. also über a/d wandler an den port als analoge spannung. so, kommt mir beim a/d wandler port jetzt zb 3,76 volt raus, so dreht sich der an diesen port angeschlossene servo in einen winkel von sagen wir mal 10° weißt ungefähr wie ich es meine? wow steht ja ganz schön viel auf der seite - werd mich mal durchlesen morgen. Hm, naja was soll ich sagen mein Lebenslauf zeigt nunmal keine Ausbildung auf diesem Gebiet. Das ist das Problem in der heutigen Zeit - man "kann" etwas nur wenn man es offiziell gelernt hat. Was privat angeeignet wird zählt Nüsse. Egal wie gut man es tatsächlich beherscht. Aber um ehrlich zu sein hab ich mich schon etwas geärgert als ich da gelesen habe das ich zu wenig erfahrung habe und nicht deren anforderungen entspreche. Wollt am liebsten dort anrufen und sie fragen ob sie dann auch in der erziehung ihrer kinder versagt haben nur weil sie nicht pädagogik studiert haben - wär ja genau das selbe.
@JediRitter: genau wie du sagtest ! Es wird nur das anerkannt, was man gelernt hat. selbstaneignung zählt NULL ! Ich z.B. mache gerade eine ausbildung zum Elektroniker im ersten lehrjahr und hab den leuten aus dem 3. Jahr schon einige male helfen müssen. Desshalb find ich ist die Ausbildung eigentlich voll für die katz! Ich mach des nur damit ich mich danach Facharbeiten nennen darf. Wiso kann man die Fcharbeiterprüfung nicht einfach so machen ? Da würde sich ja eh zeigen ob man des kann oder nicht ! Ich finde das ganze kostet nur unnötig Lebenszeit, in der man einiges besseres machen könnte! Und das mit deriner Bewerbung: Die werden zu 100 % jemand anders finden, der ne ausbildung hat, aber nicht die hälfte drauf hat, von dem was Du kannst ! Und das mit der erzeihung hätt ich knall hart durchgezogen. Naja wiso reg ichmich auf ? Kann ja eh nix dran ändern. Jetzt u deinem hexapod: ok , so weit hab ich alles erstanden und werd mich dran machen auch so ein teil zu Bauen. Werden die Bilder eigentlich von dem PC verarbeitet oder kannst du deinen roboter "nur" über den Joystick steuern ? Kann deine Digicam auch kurzfilme aufnehmen ? Würd nämlcih liebend gern mal sehen wie die Spinne in Action aussieht. Hast du dich an einen anderen hexa orientiert ? oder alles nach eigenem ermessen. Vielleicht sollten wir einen extra thread zum thema hexapod erstellen. Gruß Achim
@JediRitter: "also bluetooth wäre von der anwendung her irre einfach, nur leider geht das ganze nur auf 15 meter." Warum wäre das irre? Mal abgesehen davon, dass der Bluetooth-Standard von 100m Entfernung schreibt.
ja ich reg mich auch nicht mehr drüber auf, kanns ja doch nicht ändern. nein, wie ich schon sagte kann er sich völlig autonom (also selbständig) durch den raum bewegen. joystick dient rein der manuellen steuerung wenn ich mich spiele g hab ihn besser gesagt so proggrammiert das er wie eine echte spinne (ich nehme es zumindest an das die sich so verhalten) sich immer in die dunkelsten ecken der wohnung zurück zieht. (LDR on Board) d.h. er wandert also mit der sonneneinstrahlung in die wohnung nur im umgekehrten sinn. trifft er auf ein hindernis so wird er darauf reagieren auf welche weise auch immer. wenn ich zb mich vor ihm stelle wird er zunächst stehen bleiben und wenn er merkt ich bin zu groß wird er mich entweder umgehen oder zwischen den beinen durchgehen. oder er wird nen rückzug machen weil ich ne "gefahr" sein könnte (wie gesagt das verhalten einer spinne so ziemlich nachempfunden) er reagiert nämlich vorallem auf lichtänderungen und wenn jetzt ein großes objekt plötzlich vor ihm steht ändert sich schlagartig die lichteinstrahlung und sagt somit aus das jetzt etwas vor ihm ist das bis vor ner sek. noch nicht da war. so was ich oben vergessen hab zu sagen: hab ja von der umgebungerkennungs gesprochen. das der laser in dem winkel steht ist auch nicht gerade ein zufall, sondern der winkel zur kamera ist wichtig wegen der abstandsmessung. also theoretisch wie beim menschlichen auge: wenn wir ein objekt fixieren, dann stehen die pupillen ja auch in einem winkel zueinander. und wenn man jetzt ein dreicek bildet zwischen den zwei pupillen und dem objekt so "errechnet" unser hirn den ungefähren abstand. und so funktioniert es auch beim hexapod also zwischen objekt, kamera und laser. hab eigentliche keine "aufnahme"funktion im programm stehen - wär aber ne überlegung wert. immerhin werden die bilder ja in echtzeit übertragen. aber ich hab zusammen mit nem freund an der TU (technische universität) erst vor kurzem ein kleines viedeo über das trum gedreht - er möchte es mal seinem proffessoren zeigen was die davon halten (wollt aber den hexapod nicht aus den händen geben weil so viel arbeit drinn steckt darum das video) hat allerdings knappe 86MB und ist darum zu groß zum posten. naja also das bluetooth modul das ich eingebaut habe, hat mir keine großen schwierigkeiten gemacht aber es geht auch nur auf 15 Meter. aber 100 meter wären eigentlich schon sehr gut finde ich
Grüßt Euch, man kann auch das Signal der Fernbedienung, also das was an IR Led geschickt wird, an ein Sendemodul geben. Natürlich dann auch über einen entsprechenden Empfänger wieder dekodieren. Ein Hobbykollege von mir hatte dies schon mal getestet. Mit freundlichen Grüßen Jürgen....
Nachtrag, ich glaube er hatte das Sendemodul aus einer Funkmaus genommen. Das noch als Ansatzpunkt.... die sind jedenfalls sehr klein und leicht.. Tschüß....
nein hab die sender/empfängermodule tatsächlich aus dem modellbau abgezweigt. genau so wie die servos. aber wenn wir schon beim thema sind, was für eine reichweite haben denn die module der funkmäuse?
"aber wenn wir schon beim thema sind, was für eine reichweite haben denn die module der funkmäuse?" Wahrscheinlich genausoviel wie IR, und definitiv weniger als BT oder WLAN.
Jürgen, ist das Sendemodul einer Funkmaus denn in der Lage, mehr als nur 2 überlagerte Bewegungen zu übermitteln ? Wobei das ja für die Steuerung schon ausreicht, also eine gute Idee ist, wenn da nicht die begrenzte Reichweite wäre.
Jedi, es scheint, als ob Funkmäuse so etwa 2 m packen. http://www.wer-weiss-was.de/theme24/article640305.html Mich würde mal interessieren, warum und vor allem wie Du die Bluetooth Verbindung zwischen Deinem Hexapod und Deinem Rechner aufgebaut hast. Welches Modul/Bauteil hast Du dazu verwendet. Und warum hast Du das nachträglich mit Bluetooth gemacht, nachdem Deine alte Steurung ja anscheinend gut funktioniert ?
woher? da gibt es so tolle mäuse fürn laptop die über bluetooth gehen. den stick normal am rechner draufgeschnallt und das innenleben der maus (das brauchbare natürlich) ausgeschlachtet und im hexapod verbaut. nicht nachträglich - zusätzlich und befindet sich im test - funktioniert zwar recht gut nur die reichweite lässt zu wünschen.
die Fotos stammen allerdings von ner Zeit ohne Bluetooth modul am buckel. jetzt sieht er nämlich aus als würde er nen kleinen rucksack schleppen weil das oben drauf gepackt wurde. (direkt über den akkus)
Hä ? Das kapier ich jetzt immer noch nicht. Eine Maus sendet doch nur Informationen und empfängt nix...Kann das Blauzahn-Innenleben einer Funkmaus denn auch empfangen ?? Weil das muss es ja, wenn Du es als Empfänger auf Deinem Hexapod draufhast.
ja ist ja auch richtig. aber bissi modifizieren muss man ja eh alle bauteile wenn sie aus einem anderen bereich kommen.
Ein "bissi modifizieren"...Du willst mir jetzt nicht erzählen, dass Du da auf diesem Bluetooth Modul rumgelötet hast. Oder war die Modifikation eher, dass Du das Sendeteil aus der Maus an den Rechner angeschlossen hast und das Empfangsteil, das eigtl. an den PC geht, in den Roboter eingebaut hast ? Leider sind die I-Module der Firma InSys mit 100 Euro/Stck ein bissi zu teuer für das, was ich vorhab. Das wären bei 3 Robotern ja schon 300 Euro. Ich muss mich echt nach was Günstigerem umsehen.
wow also auf der kleinen platine anfangen rumzulöten g nee das hab ich mir nicht angetan - hab rein die teile getauscht! also das zeug das ich aus der maus ausgebaut habe auf den usb connector der am empfänger drauf war angeschlossen und den losen empfänger nun am hexapod (war aber genug fizelarbeit) 100 euro? bissi teuer - die maus hat gerade mal 36 euro gekostet.
aja, hab jetzt doch meinen frust bei der firma ausgelassen und denen einen netten brief geschickt g
@ achim sag, du hast doch gemeint ich kann im wiki ne seite über den hexapod einrichten oder? wo soll denn das gehen? kann ich auch n video raufladen? kann man die dann wieder löschen irgendwann?
@Jedi: Hast Du richtig gemacht. Es gibt übrigens nicht nur diese Firma, sondern noch sehr viele andere gute und sehr gute Läden in Deutschland und anderswo auf der Welt, wo Du Dich bewerben kannst. Also Kopf nicht hängen lassen. Vielleicht überlegen die es sich ja sogar, nun da sie wissen, aus welchem Holz Du geschnitzt bist. Zurück zum Robot: Glaubst, es ist möglich, einen normalen USB-Bluetooth Stick als Empfänger im Robot zu verwenden, wenn man denselben mit ner externen Stromversorgung versieht ? Robotische Grüße, Tilman
@JediRitter "aja, hab jetzt doch meinen frust bei der firma ausgelassen und denen einen netten brief geschickt *g*" Dien Ziel war doch aber ein anderes: Du wolltest (willst du nicht mehr?) bei deiser Firma anfangen, weil du ... was auch immer. Deine Vorgehensweise beim BAu der Komponenten, duie dazu notwendigen Kenntnisse und Fähigkeiten sind ja durchaus der angeforderten Position adäquat und angemessen (bzw. gehen vermutlich sogar weit darüber hinas). Und irgendwelche Personal-verantwortlichen können halt erstmal nur nach irgendwelchen formalen Qualifikationen gehen: Was - der hat keinen E-Schein oder ist nicht ausgebilder Elektronik-was weis ich -> schwupps landest du im Stapel "C". GRADE die Dinge die du da aber gebaut hast sind (auf den ersten Blick) "verdammt gut". Hast du die bei deiner Bewerbung (als Arbeitsprobe) mit eingereicht? Ich wäre auf jeden Fall mächtig beeindruckt und hätte dich mindestens auf Stapel "B", möglicherweise auch auf Stapel "A" gelegt. Schick "denen" (oder dem nächsten) AUF JEDEN FALL eine Arbeitsprobe deines Könnens mit (incl. der technischen Beschreibung der ganzen Dinge die du hier in diesem Thread so locker flockig formuliert hast). Der Interessierte Arbeitgeber weiß dies zu würdigen.
Ich kann Martin nur beipflichten. Das sollte der richtige Weg sein ! Nur keine falsche Bescheidenheit, jedenfalls nicht an der richtigen (&wichtigen) Stelle.
ihn als empfänger im robot zu verwenden sehe ich kein problem. aber was meinst du mit demselben und extriger stromversorgung? aufdaleitungsteh naja mein ziel war es zu dem zeitpunkt dort zu arbeiten als ich mich bewarb. aber absage bekam ich ja schon - und nachdem ich so verurteilt wurde, schwankt die meinung ganz leicht. egoangekratztwurde sollten die es sich aufgrund meines netten briefleins es sich doch anders überlegen kann man ja mit denen drüber reden. Hm, versuch ist es ja wert fürs nächste mal ..... Vieleicht so ne art DemoCd beilegen ...
JediRitter: Hier kannst du die Wiki seite erstellen: http://www.mikrocontroller.net/wikisoftware/index.php?title=Haxapod&action=edit für ein video dieser grösse, müsste man leider einen aderen Server suchen. könntest Du mir Das Video auf CD brennen und zuschicken ? Meld dich bitte mal per email bei mir. MfG
> Hm, versuch ist es ja wert fürs nächste mal > ..... Vieleicht so ne art DemoCd beilegen ... Scheinbar ist dir der Ablauf von irgendwelchen Personal-Sachen nicht ganz geläufig. Stell dir mal folgenden Ablauf vor, der nicht unecht ist: Da ist also auf der einen Seite ein mächtig gestresster und gefrusteter Personal-Sachbearbeiter, der ca. 30 Bewerbungsmappen auf seine Anzeige rein bekommt. Und der hat nun die Aufgabe, die Sachen für seinen Chef doer eine anfordernde Fachabteilung in 3 Häufchen zu packen. Heraus kommt Häufchen C: 15 Mappen "Schrotthaufen". Häufchen B: 10 Mappen "Kann man ja noch mal drüber schauen" Häufchen A: 5 Mappen "Unbedingt anschauen, den könnte man einladen" Und dan kommt der ganze Krams zum Chef. Der schaut durch: Häufchen C: da schaut er jede Mappe maximal 30 Sekunden durch, und findet, daß sein "Vorarbeiter alle C-Mappen zu Recht in C einsortiert hat. Möglicherweise "upgraded" er ein oder 2 zu Stapel "B" Häufchen B: Na ja, ist schon nicht schlecht. Jede Mappe wird 1 Minute gesichtet, ein paar landen auch bei C, und maximal 1-2 landet auf A Häufchen A: "die creme de la creme": Jede Mappe wird 2 Minuten gesichtet. Zum Schluss werden 5 Kandidaten zum Gespräch eingeladen. Wenn du nun dein Werk auf eine CD packst (oder eine Webseite angibst), wann und wie sollte die in den zuvor genannten Ablauf rein passen? Daher: Nix CD. Mach bitteschön eine kurze, prägnante Bescheibung deines Projekts auf 1, maximal 2 Seiten: Druck die auf Hochglanz-Papier aus (2-3 nette Fotos deines "Kleinen"), und beschreib in einfachen verständlichen Worten die Vorgehensweise etc. Eine CD landet im Papierkorb oder in der Schublade der Schreibkraft, welceh die Briefcouverts öffnet. Das Papier wird aber zusammen mit deinem Anschreiben "beim Chef" (oder in die Fachabteilung) reingereicht. Nur Mut zum "Projekt-MArketing". Du brauchst da kein Diplom, dein Spinnetier ist allemale mehr Nachweis als das Diplom oder der formale Facharbeiter-Brief von xxx
@JediRitter: >nee hab keine seite dazu >sollt ich leicht eine einrichten dafür? Was hälst Du denn von dieser Seite? http://www.tappotec.com/nano_index_d.htm Das grenzt ja schon an Bodenlose unverschämtheit! Soltlest Du allerdings der wirkliche Author dieser Seite sein, und nur vergessen haben, daß Du da eine Seite ins Netz gestellt hast, dann entschuldige ich mich schon im Voraus!
Hab noch was interessantes gefunden. Seht euch das mal an: http://www.roboternetz.de/phpBB2/zeigebeitrag.php?t=6197&highlight=nano jetzt weiß ich woher mir das bekannt vorkommt. War mir nur nicht mehr sicher wo ich´s gesehen hab. @ Andreas Schwarz ich finde dagegen sollte man etwas tun, oder nicht?
Tja, da war unser "JediRitter" wohl doch nur ein kleiner Blender und Betrüger. Ich finde es schon traurig, daß er sich traut, so mit fremden Leistungen in die Öffentlichkeit zu gehen, weil er selbst nix gebacken bekommt außer tolle Geschichten zu schreiben. Kein Wunder, daß Sie solch einen Blender bei deiner Firma nicht haben wollten - wahrscheinlich reichen deine elektrischen Kenntnisse noch nicht mal dazu aus, eine Glühbirne richtig rum in die Fasung zu drehen. Viel "Erfolg" beim weiteren durchs-Leben-schwindeln....
Danke, OldBug für die Recherche. Man muss anscheinend wirklich vorsichtig sein, wem man was glaubt. Jedi...wie wäre es mit einer kurzen Stellungnahme ?
Hallo Leute, seid lieber froh, wenn er das Forum verlassen hat. Habe mit ihm am Donnerstag schon einen Flamewar geführt. Wollte nur noch kurz folgendes feststellen: - Servosignale sind (zumindest im Modellbau) keine analogen Signale, sondern die Servoposition wird über die Pulsweite definiert. Ein AD-Wandler hat daher beim Empfänger nichts zu suchen - Modellbaufernsteuerungen sind für die Datenübertragung nur bedingt geeignet, da die Bandbreite zu gering ist. Allerdings haben sie eine hohe Reichweite - für Tilman könnte ein Funkmodem das richtige sein. Dazu gibt es hier im Forum auch schon einige gute und preisgünstige Vorschläge. Es gibt auch zahlreiche Funkmodule (analog oder digital), die auf 433 MHz, 866 MHz oder 2.4 GHz arbeiten. Kommt eben auf die Anforderungen an Gruß, Achim.
Und der hat mir per email geschrieben, dass er mir 2 Videos zusendet. kopfschüttel! Gegen solche sollte man echt was unternehmen ! wens interessiert: http://www.strv.cosy.sbg.ac.at/detail.php?section=forum&action=showthread&id=1357 (hab mal bei googel seine mail adresse eingegeben) zum Roboter: Weiss jemand woher man solche mini Servos bekommt ? Kann mir jemand erklären, wie der roboter seine aktuelle position eines servoc feststellen kann ? und wie er immer wieder aufs neue genau positioniert wird ? Gruß
miniservos gibt es z.B. für die 1:87 (H0) Trucks unter www.mikromodellbau.de Zum Rest sach ich nix. muss jeder mindestens einmal im Leben auf die Schnauze fallen. Gruß AxelR.
erschreck !! gibts das auch ein bisschen billiger ? die 18 servos würden (bei 30 EUR das stück) zusammen 540 EURO kosten ! Da gibts doch sicher alternativen wo man einen servo für 5 - 10 EUR bekommt. MfG
heissen irgentwie Pico5 oder so. Such doch mal bei google http://www.wes-technik.de/Deutsch/d-servo.htm
puh....es muss doch was in der preisklasse 5 -10 EUR geben. Beim conrad gibts einen für 7,95 /Stück bei ner abnahme von 10 stück. Sowas musses doch auch in der passenden grösse geben.
das Potigetriebe wird die Sache teuer machen... leicht solls auch noch sein, vielleicht was aus fernost? Bei Handysteckern gibt es ja auch billige Plagiate. www.walta.com.tw AxelR.
google ist unser freund... http://www.google.de/search?hl=de&q=micro+RC+Servo&spell=1 http://stores.channeladvisor.com/rc-toys-hobbies/RC%20Servos/
> Weiss jemand woher man solche mini Servos bekommt ? eBay wieso oft, kosten ca. 9 Euro, mit ca. 10Ncm heben sie 1Kg bei 1cm Arm. Wichtig ist auch noch die Geschwindigkeit, die meisten liegen bei 0.16sec/60° >Kann mir jemand erklären, wie der roboter seine aktuelle position >eines servoc feststellen kann ? und wie er immer wieder aufs neue >genau positioniert wird ? Tja, da wäre es hilfreich für dich sich über die Funktionsweise eines Servos kundig zu machen. Ist wirklich recht simpel. Im Servo sitzt die Mechanik/Getriebe, der Motor, am Getriebe ein Potentiometer und eine Elektronik die den Motor antreibt und die Position des Potentiometers ausliest. Über ein 3-adriges Kabel wird Vcc/GND und das Signal eingespeist. Dieses Signal besteht aus einer sich wiederholendem PWM. Deren Dutycyle mit 50% bestimmt die Nullstellung. Die Stellung des Potentiometers schließt also den Regelkreis für die Elektronik. Ergo: wenn man dem Servo eine PWM mit Dutycycle von 25% == 1/4 sendet so dreht das Server den Arm auf exakt 1/4 seines Wirkbereiches, und verbleibt dort. Würde man mit Kraft den Serverarm aus der Position drücken so würde das Servo automatisch versuchen gegenzusteuern. Logisch da ja das integrierte Potentiometer einen anderen Wert liefert, zu 25% Dutycycle. Man muß also garnichts machen, wenn man dem Servo sagt "stelle dich auf 1/4 Position ein" dann tuet es dies und versucht sogar äußere Störeinflüsse nachzuregeln. Auf's neue genau positionieren ist auch ganz einfach, man sendet einfach eine PWM mit 25% Dutycylce und schon stellt es sich auf 1/4 Position ein. Die exakte Positionierung hängt nur von der Qualität des Servos ab. Wie du siehst, viel einfacher als erwartet :-) Viel teurer und schwieriger sind die nötigen Sensoren an den Beinen um auf Drücke zu reagieren, sprich die Druckempfindliche Sensorik wie in unseren Händen und Füßen. Ohne diese ist es nämlich garnicht so einfach sich fortzubewegen, jeder der schonmal die Holländischen Holzschuhe anhatte weis das :-) Im Falle des Roboters sind sie aber wichtig um zb. auf Höhenunterschiede im Boden zu reagieren. Denn ohne diese Sensoren kann die Elektronik nicht "wissen" wie weit sie das entsprechende Bein aufsetzen/anheben etc. muß und schlußendlich dürfte der Roboter nie ordentlich waage liegen, über Steine steigen etc. pp. Gruß Hagen
Achso, fehlt noch die "Intelligenz", denn ohne Mathematik dürfte die saubere Ansteuerung von 18!! Servos nicht mehr ganz so einfach sein :) Alles in allem eine echt saubere Leistung, Hut ab. Gruß Hagen
Hab mal ein Projekt im Web gesehen, da ging es (auch) um einen Hexapod. Der Mensch wollte jeden Servo einzeln per I2C steuern und hat in jedem Servo die Elektronik durch einen ATMega ersetzt. Leider habe ich die URL nicht mehr - war aus USA. Über diese Lösung hatte er die Möglichkeit, auch die Gegenkräfte, die auf den Servoarm wirken, zu messen und an den Hauptrechner zu melden. Naja, für das konkrete Problem von 18 Servos würde ich 2 ATMega8 nehmen und dort per Timer die PWM generieren. Das ganze durch einen dritten Controller gesteuert. Vielleicht gehen die Servos ja auch ne Nummer größer, dann wird's auch billiger. Achim.
Das mit den Drucksensoren an den füssen hab ich mir schon gedacht, da der o.g. hexapod auch welche hat /und gleich 12 stück davon. Naja...ich dachte als erstes würde ich mich um die servos kümmern und mal versuchen ob ich so ein hexapod auf einer ebenen fläche zum laufen bringen kann. Dann würde ich als nächsten schritt drucksensoren an das teil machen. Aber erstmal die Servos. (da ich mich mit sowas nicht wirklich gut auskenne) was haltet ihr von dem: http://www.modellbau-friedel.com/lshop,showdetail,312,d,1114454028-3641,08.22-023,023-502001,,Tshowrub--08.22-023,.htm werd dann anhand dieses servos versuchen ein bein zu bauen. Da ich Schüler bin und somit viel zeit hab, wär solch ein projekt perfekt für mich. MfG
>was haltet ihr von dem.... Servo...
Bei den 0,09sec musst du aufpassen. Einige Anbieter beziehen diese
Geschwindigkeit auf 60°, andere auf nur 40° Winkel, und andere wiederum
bei 4.8 Volt oder eben 6 Volt. Das macht riesige Unterschiede,
angenommen es sind 40° bei 6 Volt -> würde dann umgerechnet ca. 0.18
sec bei 60° und 4.8 Volt ergeben, eher also durchschnittliche Werte.
Fehlt noch die Angabe der Dimensionierung,Gewicht, Plaste- oder
Metallgetriebe, einfaches Poti oder
Mehrschleifen-Präzisionspotentiometer. Also ziemlich viel
Des-Information, und die 2 Euro weniger bringen es dann nicht.
Die 10Ncm scheinen ok zu sein, allerdings auch hier solltest du erstmal
nachrechnen statt blind zu kaufen. Auch wenn der Robotor ziemlich kurze
Beine hat und sein Gewicht eher klein ausfallen sollte, könnten 10Ncm
sprich 1Kg Last an einem 1 cm langem Arm sehr schnell nicht mehr
ausreichen. Angenommen die Stelzen werden 5 cm lang, so hast du nur
noch 200g Kraft pro Bein, und wenn er sich bewegen soll so müssen 50%
der Beine die komplette Last halten können. Die anderen musst du ja
bewegen :-)
Mail doch mal den Typen vom Nano an, der wird bestimmt einige Servos
getestet haben. Ich habe ja auch keine praktische Erfahrungen auf
diesem Gebiet :-)
Die Drucksensoren zu ersetzen indem man die Stellzeiten, sprich das
Servo-Potentiometer auswertet wird glaube ich nicht funktionieren.
Jeder Motor+Getriebe der Servos reagiert anders, ergo hat ein anderes
Stellverhalten. Jetzt dazu noch zusätzlich eine Auswertung auf
Gegendruck reinzubauen dürfte schwierig sein. Ansonsten frage ich mich
warum der Typ beim Nano das nicht so gemacht hat, immerhin hat er teure
Drucksensoren stattdessen verbaut.
Interessanter wäre da ein Gleichgewichtssinn, nur mal als Anregung.
@Guido: och hör doch auf :-) shit clock, in der Größe ist es echt
kompliziert.
Gruß Hagen
Statt den Strom als Messgröße zu benutzen wäre es meiner Meinung nach besser den zeitlichen Stellwinkel zu messen. Bei Last verringert dieser sich ja. Denoch, bei all diesem Gefummel misst man immer Mist, sprich man mißt nicht die objektiven Verhältnisse unter dem Bein sondern man mißt einen Großteil der physischen Gegebenheiten innerhalb des Servos, sprich Getriebeverluste, Potentiometertoleranzen, Motorschwankungen. Zudem sind diese Servos so ausgelegt das sie mit Motoren mit hoher Drehzahl arbeiten und das Getriebe eine ziemlich starke Untersetzung aufweist. D.h. die Motorstromschwankungen haben nur noch sehr wenig mit den äußeren Einflüssen zu tun. Diese "Optimierung" muß ja bei einem Servo auch das Ziel eines Konstrukteurs sein um einen guten Servo zu bauen. Dieser soll mit möglichst geringem und kontinuierlichen Strombedarf die erforderliche Halte- und Stellkraft erzielen. Ich vermute das gerade aus diesem Gunde beim Nano externe Drucksensoren verwendet wurden. @Guido: warum willst du diese Mikromotoren benutzen ? Die heutigen Micoservos sind so groß wie ein 5 Cent Stück, haben ein gekapseltes Getriebe, erzeugen viel Kraft und ermöglichen nicht zu schnelle Bewegungen, oder sollen die Beine des Roboters mit 50U/min um ihre Achsen rotieren ?? Soviel ich weis sind diese Motoren (obiges PDF) eher für diese Mini-Mikro-Modelle im Matchbox Format gedacht. Bei denen nimmt man SMT LED's in 1 mm Durchmesser als Blaulicht-Rundumleuchte :-) Gruß Hagen
Hier ging es aber ja eigentlich um eine Fernsteuerung, richtig? Ich habe da auch schon mal drüber nachgedacht: Einfach so ein "433/868MHz Funkmodul" mit entsprechender Bitrate als Übertragungseinheit und schon stehen einem Tür und Tor offen. Sogar Bidirektional! Vielleicht hat da ja auch schon jemand so seine Ideen zu...
Als Druck/Kraft-Sensoren sollten sich die sog. "Bi-Morph Piezo" eignen, die es bei RS-Components gibt. http://www.rsonline.de/cgi-bin/bv/browse/Module.jsp?BV_SessionID=@@@@0761768143.1114498657@@@@&BV_EngineID=ccckaddehhhlfkicefeceefdffhdglg.0&cacheID=deie&3291951579=3291951579&stockNo=0285784&prmstocknum=0285784&prodoid=0124973 da der Link sowieso nich geht ;-) die Bestellnummer is 285-784. 5stück kosten 10Euro, also auch ganz schön teuer (RS eben) Die kleinste Biegung an den Teilen nach oben oder unten erzeugt eine exakt reproduzierbare Spannung. Nur so als Idee AxelR.
http://www.corscience.de/telemedizin.html nur ein Beispiel. Man muss halt wissen, wonach man sucht. BLUETOOTH OEM habe ich in Google eingetippt (nur Seiten aus D) Da kommt allerhand, warum nicht BT nehmen? Die Datenraten sind weit höher als die schmalbandigen Funkmodule Gruß erneut AxelR.
Aber wie siehts mit der Reichweite aus? Ich habe da keinerlei Erfahrung, und ich würde schon gerne so um die 50-100m "Fernsteuern" können...aber sonst ist natürlich nichts gegen Bluetooth einzuwenden!
Vor einiger Zeit habe ich Compact Flash WLAN Module analysiert. Diese würden mich schon eher reizen. Allerdings auch bei eBay sind sie noch nicht im Bereich 10-20 Euro zu haben. Zur Zeit scheinen aber die integrierten WLAN-DSL-Router im Preis zu sinken. Auf alle Fälle würde ich Bluetooth oder WLAN allen anderen vorziehen, eben weil deren Ansteuerung auf'm PC so easy ist. Wobei es heutzutage einfacher ist einen TCP/IP Server zu coden als über einen virtuellen COM Port ein Bluetooth Modul zum laufen zu bringen. Leider gibt es noch zu wenige WLAN-CF Projekte und so wie ich es im WEB recherchieren konnte ist SanDisk mit ihren Dokus/PDF's mal wieder der einzigste Hersteller bei dem man ausführlichere Datenblätter findet. Desweiteren ist der Anschluß der WLAN-CF Karten über das XMEM Interface des AVR's keine triviale Aufgabe, die Karten haben ein variables Timing/Waitstates. Gruß Hagen
dann kann ich mal gleich mein GSM Modul GR47 von Sony-Ericsson einbauen. Da hätt' ich dann alles drinne. Also ich denke, man sollte realistisch bleiben und die Kirche im Dorf lassen. ;-) AxelR.
Achso: 100m mit Bluetooth ist so blauäugig wie der Blauzahn selber. Selbst meine Class I Module reichen nur durch 3 Wände und 7m Luftlinie. WLAN ist da schon leistungsfähiger, die Module brauchen aber auch schon richtig Power, Tx ca. 230mA bei den SanDisk Teilen. Gruß Hagen
@Axel: warum ? die 433/868MHz Module bieten meisten ca. 1200 Baud sichere Datenübertragung und das für Preise ab 40 Euro für bessere Module. Mit WLAN oder Bluetooth erreicht man wesentlich stabilere und höhere Datenübertragungsraten und man muß nur eine Seite der Kommunikation wirklich programmieren. Bei den Funkmodulen muß man auf PC Seite seinen eigenen Sender/Empfänger bauen, extra Software schreiben um dann am PC über RS232 die Daten zu bekommen und sie wiederum in seiner eigenen Software auswerten zu können (alles für 1200-4800 Baud). Im Falle der CF-WLAN Module würde man nur auf MCU Seite programmieren müssen, der Rest ist mit bestehenden Netzen schon fertig und man benötigt nur noch die TCP/IP Anbindung in seiner PC Software. Einen TCP/IP Server programmiere ich dir mit Delphi in 2 Stunden und dann aber schon als Windows Service, genauergesagt ist es fast nur Komponentenschieberei wenn man INDY benutzt. Egal, ich für mich persönlich werde die preisliche Entwicklung der WLAN Module auf alle Fälle weiter beobachten und bei Gelegenheit zuschlagen. Gruß Hagen
Na gut, als gestandener Funkamateur (und der notwendigen Messtechnik im Labor) würd sich ja 'ne Antenne bauen lassen, die hier Abhilfe schaffen sollte. Aber gut, die Reichweite im originalen ist eher bescheiden, halt an die "originalen" Bedürfnisse angepasst, Freisprech oder Kalenderupdate im Handy. Zum Testen reichts aber erstmal allemale aus. Ich will sagen, dass die Reichweite eher das geringste Problem darstellt. Halte mal den Hexapod über die Tiltsensoren in der waagerechten mit 18 Servos oder bring ihm einen Schritt bei, ohne dass er umkippt. Danach kann man sich über die Reichweite Gedanken machen ;-))) AxelR.
Neee neee :-) Es ging mir jetzt Grundsätzlich um eine möglichst universelle, leicht erweiterbare digitale Fernbedienung für Roboter/Modellfahr-/flugzeuge!
was sagt ihr zu diesem servo ? wäre der für solch eine sache in ordnung ? http://www.modellbau-friedel.com/cgi-bin/lshop.cgi?action=showdetail&wkid=29933&ls=d&nc=1114784048-30192&rubnum=&artnum=023-13373&file=&gesamt_zeilen=0Tsuche--023-13373
ich glaube ein grosses problem der servos ist, dass sie in einer bestimmten position, wo sie einen grossen teil des robotergewichts tragen müssen enorm viel strom ziehen. d.h. stromversorgungseinheit wird grösser und schwerer. zur vorgeschichte: wir haben in der htl als maturaprojekt einen biped gebaut (roboter mit nur zwei beinen) also bis zur hüfte sind wir gekommen. (den oberen teil haben wir aus zeitlichen finanziellen und gewichts-gründen nicht mehr gebaut. jedes der beiden beine wurde mit 5 servos bewegt. gesamthöhe des biped's was ca. 30 cm (zehe bis zur hüfte) dieser biped konnte (langsam) gehen, zog enorm viel strom, sodass die versorgung extern über kabel zum biped erfolgte.
wie läuft das eigentlich mit den sd wlan modulen? die sind ja mittlerweile fast erschwinglich..sind da ip stack etc. schon 'mit drin'? eigentlich möchte doch jeder eine funkverbindung mit unendlicher reichweite, die nichts wiegt, nichts kostet, keinen strom braucht, und einen stereo videostream ermöglicht..:-) ist ein videostream nennenswerter qualität eigentlich schon unter realbedingungen mit bluetooth geschafft worden?
Nein, in solchen SD-WLAN-karten ist kein IP-Stack "mit drin". Das sieht bei dem WLAN-Modul der Firma Lantronix allerdings anders aus (http://www.lantronix.com/device-networking/embedded-device-servers/wiport.html) Mit so einem Modul dürfte eine Videoübertragung (auch noch "stereo", also zwei Kanäle simultan) nur schwer möglich sein, da die Anbindung an restliche Hardware über eine serielle Schnittstelle mit max. 900 kBit/sec erfolgt. Ob mit der recht geringen Bandbreite, die Bluetooth bietet (nämlich nur rund 750 kBit/sec) eine brauchbare Videoübertragung möglich ist, wage ich zu bezweifeln, es sei denn, es würde sehr stark komprimiert (mpeg4 o.ä.). So muss entweder "richtige" WLAN-Hardware an einem ausreichend leistungsfähigen Rechner angeschlossen werden, oder aber eine klassische analoge Videoübertragung verwendet werden (die natürlich störanfälliger ist, dafür aber realtime in PAL-Auflösung mit echten 25fps, und bei Verwendung zweier HF-Träger auch zwei simultane Kanäle zuließe)
Hi Wie wärs mit diesem Modul? http://www.netsilicon.com/products/embeddedmodules/digiconnectwime.jsp Der virtual com driver wandelt ein RS232- Signal auf dem PC in einen TCP/IP Datenstrom und sendet diesen per W-Lan an das Digi Connect Modul. Dieses setzt die Daten wieder auf RS232 Signale um, so das sie problemlos mit einem uC UART eingelesen werden können. Vorteil: Keine TCP/IP Kenntnisse erforderlich. / W-LAN Reichweite Nachteil: Preis / Stromaufnahme Für Bluetooth sind ebenfalls Module erhältlich, welche den TCP/IP Stack bereits im Silizium integriert haben und sich genau so einfach integrieren lassen. Lieferquelle für die Schweiz unter anderem: http://www.reselec.ch Gruss Andy
Das ist eher was für ein größeres Kaliber von Roboter, meiner ist ja ganz klein. Ich habe es jetzt mit dem Blue RS+I von Stollmann (www.stollmann.de) gemacht. Das ist klein, leicht und relativ sparsam im Energieverbrauch. Es lassen sich damit Datenübertragunsraten bis 115200 baud erreichen. Gruß, Tilman
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.