Hallo, mir ist nicht klar, warum bei der Übertragungsfunktion in der Regelungstechnik physikalisch der Zählergrad m der Übertragungsfunktion nicht höher sein kann als der Nennergrad n, solche Systeme seien physikalisch nicht realisierbar, aber warum ? Woran erkennt man das bzw. wie begründet sich obige Aussage?
Übertragungsfunktionen mit m>n sind gerätetechnisch nicht realisierbar.
Ein System mit m=>n ist ein Nicht-kausales-System - d.h. die systemantwort kommt vor dem ereignis...
Andi ... schrieb: > Ein System mit m=>n ist ein Nicht-kausales-System - d.h. die > systemantwort kommt vor dem ereignis... Geht das vll. etwas genauer?
Wie "genauer" ? Was willst du konkret wissen ?
Genauer: Nicht Kausal! Also du kriegst nen schalg BEVOR du den Stecker eingesteckt hast. Oder: Die Lampe geht an 5 sec. BEVOR der Schalter betätigt wird, oder Doctor WHO kann auf Fragen antworten bevor sie gestellt werden (Äh ok schlechtes Beispiel). MfG ich
Ja mit genauer meine ich, dass mathematisch zu begründen, d.h. anhand der einfach differentialgleichung, wie kann man begründen, dass das system nicht-kausal ist?
Ist tatsächlich nicht ganz einfach. Einfach ist es im Zeitdiskreten Fall. Da kannst du einfach eine Differenzengleichung hinschreiben und siehst, dass du das Ergebnis out[n] erst zu einem Zeitpunkt n+k berechnen kannst, wenn du alle Werte bis hoch zu in[n+k] kennst. Die Systembeschreibung sieht aber diesen Zeitversatz nicht vor, also musst du in[n+k] schon zum Zeitpunkt n wissen. Das System ist nichtkausal. Im kontinuierlichen Fall sieht's ähnlich aus. das einfachste nichtkausale System ist out(t) = s * in(t), also ein Differenzierer. naja und die Ableitung ist definiert als der Grenzwert von (in(t+dt) - in(t-dt)) / dt Ganz pragmatisch: dt wird nie exakt 0, und daher schaut der Differentiator immer etwas in die Zukunft. Da steckt noch bisschen mehr dahinter, denn für die Ableitung braucht man eigentlich noch mehr also nur einen kurzen Blick in die Zukunft. Die exakte Ableitung erfordert, dass das ganze Signal bekannt ist, bis t-->+inf Aber je mehr Zeitversatz du zulässt, desto besser wird die Approximation der Ableitungen in realisierbaren Differenziergliedern.
:
Bearbeitet durch User
Wenn Zählergrad > Nennergrad dann geht |F(jw)| gegen unendlich für hohe Frequenzen. Damit würde man eine unendlich hohe Energie benötigen bzw. erzeugen.
Poste doch einfach den genauen Aufgabentext. :-) Man kann sich ausserdem auch bedanken, das nennt man "höflich sein". statt: Sebastian schrieb: > Geht das vll. etwas genauer?
A. S. schrieb: > mehr also nur einen kurzen Blick in die Zukunft. Die > exakte Ableitung erfordert, dass das ganze Signal bekannt ist, bis > t-->+inf > Aber je mehr Zeitversatz du zulässt, desto besser wird die Approximation > der Ableitungen in realisierbaren Differenziergliedern. Tut mir leid, ich wollte nicht unhöflich sein. Es gibt keinen Text dazu, das ist eine Frage, die ich mir Stelle, da das nahezu in jedem RT-Buch steht, jedoch für mich keine plausible Erklärung finde...!?!
Hallo, die Erklärung ist ansich keine so grosse Sache. Deine Übertragungsfunktion sei:
mit
bzw.
der Laplace-Transformierten des Eingangs- bzw. Ausgangssignals deines Übertragungssystems. Kreuzweises Ausmultiplizieren ergibt:
wenn jetzt der Zählergrad m grösser ist als der Nennergrad, dann erkennst du jetzt schon, dass auf der rechten Seite bei U mehr Ableitungen stehen als auf der linken Seite bei Y. Angenommen, m=3 und n=2, dann ist dein Zählergrad in der Tat höher als der Nennergrad. Man erhält für dieses Beispiel:
Du kannst beide Seiten durch
dividieren, dann erhältst du:
Die inverse Laplace-Trafo davon lautet doch dann:
Jetzt solltest du auch sehen, warum es nichts bringt, wenn du beide Seiten durch
dividierst, denn dann hättest du auf der linken Seite nur Integrale von y(t), aber dich intressiert ja nicht wirklich das Integral von y(t), sondern dein Systemausgang y(t)... Auf alle Fälle ist auf der rechten Seite noch immer eine Ableitung von u(t). Und das geht nicht. Anschaulich: um die Steilheit einer Kurve in einem gegebenen Punkt zu bestimmen, musst du den 'zukünftigen' Verlauf der Kurve kennen. Wenn du dort nicht weisst, wie es weiter geht, dann kannst du auch die Steilheit nicht bestimmen, aber nichts anderes wäre die Ableitung d/dt ja... oder mathematisch:
Im Zähler kommt
vor, und obwohl Delta t beliebig klein gemacht werden kann, bedeutet das dennoch, dass du, zum Bestimmen der Ableitung, 'ein wenig' in die Zukunft guckst, was nicht möglich ist. Umgekehrt, wenn der Zählergrad kleiner oder maximal gleich dem Nennergrad ist, dann kann man genauso verfahren, wie ich es oben angedeutet habe: man kann durch die grösste Potenz von s dividieren und kann dann alle Ableitungen so 'entfernen' und alles mit Integralen ausdrücken, und die kann man ja einfach berechnen, denn dazu musst du nicht in die Zukunft gucken, musst wohl aber alle vergangenen Werte kennen und aufsummieren, und das ist ja 'kein Problem'.
Nachtrag: im Diskreten funktioniert das übrigens genauso:
Ausmultipliziert:
Beispiel m=3 und n=2:
Und jetzt wieder durch die grösste Potenz von z dividieren ergibt
Und jetzt wieder Rücktrafo in den Zeitbereich:
Auch hier brauchst du also wieder eine Glaskugel, denn du brauchst einen
zukünftigen Wert, nämlich u[k+1]. Und auch hier würde es nichts bringen,
wenn du einfach beide Seiten durch z^{-3} dividierst; rechts wäre zwar
alles super, aber auf der linken Seite würdest du nur noch vergangene
Werte von y berechnen, niemals aber den aktuellen Wert, aber genau der
ist es ja, was dich interessiert ;-)
Ah ja, und noch ein letzter Nachtrag: Es ist sowohl im Kontinuierlichen als auch im Zeitdiskreten nicht möglich, in einem realen System, eine Ableitung zu berechnen. Man kann sie approximieren, was z.B. bei PID-Reglern angewandt wird (D steht ja für Differenzieren, und genau das versucht man anzunähern, da es exakt nicht möglich ist). Im Kontinuierlichen geschieht die Approximation mit:
Hier ist der Zählergrad gleich dem Nennergrad, das System ist also realisierbar. Tv heisst Vorhaltezeit, und je kleiner Tv ist, desto besser wird die Approximation. Im Zeitdiskreten gibts auch eine ähnliche Approximation. (aktueller Wert minus alter Wert)
danke für die Ausführung Tobias, war auch für mich interessant.
Im Moment bin ich nicht im Thema drin und um mich reinzuarbeiten habe ich keine Zeit, aber wie wäre es zu betrachten, wenn man Zähler durch Nenner teilt? Wenn der Zählergrad größer als der Nennergrad ist, kommt da doch mindestens ein Polynom und ein echter Rest mit Zahlergrad kleiner als Nennergrad raus. Wie würde sich dieses Polynom auswirken?
Angehängte Dateien:
-

maxima.png
37 KB
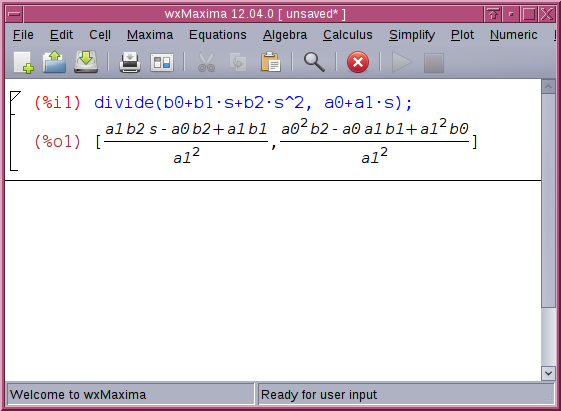
@Dussel habe ich mir so jetzt noch nie überlegt, aber intuitiv: Wenn der Zählergrad z.B. 3 ist und der Nennergrad 2, dann kommt unweigerlich etwas mit s .... heraus. Ich war jetzt zu faul, um es von Hand zu rechnen :-) und habe mal wxMaxima befragt. Siehe Screenshot - links der Quotient, rechts der Rest. Wie du siehst, hat der Quotient noch immer Zählergrad > Nennergrad, der Rest hat Grad 0 (Konstante). Eigentlich logisch... Es wäre also nicht so, dass der Rest dann echt gebrochen ist, wenn man die Polynomdivision ausführt.
:
Bearbeitet durch User
Oh, stimmt, genau genommen ist der PID-Regler nicht Kausal, deshalb auch die Parasitäre Zeitkonstante.
Tobias Plüss (hubertus) vielen vielen vielen Dank für deine Mühe. Das hat mir sehr viel geholfen !!! Und es ist nun klar, super ...! Dankeschön
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.