Hallo, da ich mich gerade in meinem Praxissemester befinde und mein Projekt umsetzten muss, benötige ich ein klein wenig Hilfe. Ich muss ein Bussystem für eine Anschauungswand Planen und umsetzten. Geplant sind zwei Bussysteme CAN und I2C. Das Projekt dient zum Erlernen der Bussysteme und hat keine tiefere Bedeutung ausser dass es am Ende einwandfrei laufen sollte. Es wird 25 Piggybacks geben welche untereinander auf einer Hauptplatine miteinander verbunden sind. Später sollte das System im Multi-Master System laufen oder im Master Slave Modus. Ich hoffe ich habe das Projekt allgemeinverständlich beschrieben. Benutzt wird der: Mikrocontroller: C8051F580 der auf jedem Piggyback ist. Somit 25 mal. Speisung beträgt 3,3 V So nun die Fragen zu CAN: Betreiben will ich Full CAN damit ich die 1 MBit/s schaffe. Somit brauche ich drei Leitungen: TX, RX und Ground. Busabschlusswiderstände mit 120 ohm. Nur bin ich mir nicht sicher ob ich vor jedem Mikrocontroller (somit 25 Stück auf jedem Piggyback) 1 Transceiver benötige? Ist dieser nicht integriert im Mikrocontroller? Wie berechne ich die Pull-up Widerstände für dieses System? So nun die Fragen zu I2C: Hierbei handelt es sich ja auch um eine 2-Draht Kommunikation. SDL(Datenleitung,) SCL (Taktleitung), GND (Ground). Jedoch gibt es hier die Einschränkung der 400pF gegenüber Ground. Wie kann ich dies berechnen um vorher schon sicherzustellen das ich unter diesem Wert bleibe bei 25 Teilnehmer und einer Datenleitungslänge von fast 3 Meter an der längsten Stelle? Aufgrund der Datenleitungslänger und Hoffnung auf Maximale Geschwindigkeit dachte ich baue in der Hälfte der Leitung ein PCA9614 (differenziellen I2C-Buffer) ein, um die Störsicherheit zu erhöhen und ein PCA9601DP um die 400 pF auf 4000pF zu erhöhen und genug Luft zu bekommen das ich meine Flanken noch erkenne. Habe ich irgendwas wichtiges vergessen? Ist das überhaupt gut so? Habe leider kein rechten unterstützung hier, deshalb hoffe ich auf eure mithilfe :) Vielen Dank schon mal im Vorfeld an euch alle.
:
Bearbeitet durch User
Stephan Maier schrieb: > Nur bin ich mir nicht sicher ob ich vor jedem > Mikrocontroller (somit 25 Stück auf jedem Piggyback) 1 Transceiver > benötige? Ja. > Ist dieser nicht integriert im Mikrocontroller? Nicht im C8051F580. Du könntest zB einen LPC1100 verwenden, der hat nicht nur den CAN-Controller, sondern auch den CAN-Transceiver integriert. Außerdem basiert dieser nicht auf der antiquierten 8051-Architektur sondern ist ein moderner Cortex-M0. Stephan Maier schrieb: > Wie berechne ich die Pull-up Widerstände für dieses System? Was für PullUps?
Stephan Maier schrieb: > TX, RX und Ground. Busabschlusswiderstände. > Nur bin ich mir nicht sicher ob ich vor jedem Mikrocontroller (somit 25 > Stück auf jedem Piggyback) 1 Transceiver benötige? Auf dem CAN-Bus heißt es CANH und CANL, Rx und Tx hast du nur zwischen deinem Controller und dem Transceiver. Das heißt natürlich auch, dass du für jeden Controller einen Transceiver brauchst. Abschlusswiderstände brauchst du jeweils einen an den beiden Enden der Busleitung. Idealerweise macht man den Widerstand in Experimentieraufbauten schaltbar oder als Zwischenstecker. Hinsichtlich Konnektoren gibt es übrigens eine Standardbelegung auf SubD-9-Steckern. Noch ein wichtiger und von neueinsteigern oft nicht beachteter Hinweis: Bei CAN brauchst du zur Kommunikation unbedingt zwei Teilnehmer! Wenn ein Teilnehmer eine Nachricht nicht versenden kann (weil niemand auf das Acknowledge reagiert), macht er einen Resend bis er sich selbst wegen Fehlerrate vom Bus nimmt. Stephan Maier schrieb: > SDL(Datenleitung,) SCL (Taktleitung), GND (Ground). Jedoch gibt es hier > die Einschränkung der 400pF gegenüber Ground. Wie kann ich dies > berechnen um vorher schon sicherzustellen das ich unter diesem Wert > bleibe bei 25 Teilnehmer und einer Datenleitungslänge von fast 3 Meter > an der längsten Stelle? Offiziell heißt die Datenleitung SDA, aber das nur am Rande ;) Die Kapazität vom Bus hängt einerseits von den Leitungen (Formeln siehe Grundstudium der Elektrotechnik ;) ), andererseits aber auch von deinen Busteilnehmern bzw. deren Rreiberbausteinen ab. Die Kapazität ist wichtig im Zusammenhang mit der Datenrate und den Pull-ups, die du verwendest (bzw. verwenden musst, damit die Kommunikation klappt). Bitte behalte im Hinterkopf, dass I²C für Distanzen unter einem Meter designed wurde aber gleichzeitig durchaus gutmütig sein kann. Hier im Forum haben wohl schon ein paar einen Hausbus damit realisiert. HTH Chris
Oh entschuldigung das mit den Pul-up`s sollte eigentlich bei I2C stehen. Da kam ich wohl durcheinander beim Tippen. Das mit dem Cortex-M0 hört sich toll an, ich werde gleich mal recherchieren und dann hoffen das ich die zustimmung bekomme. Sonst muss ich halt den umständlichen Weg wählen.
Stephan Maier schrieb: > So nun die Fragen zu I2C: Beim I2C wird eine logische 0 niederohmig getrieben (d.h. ein Transistor verbindet niederohmig mit Masse) und eine logische 1 hochohmig gegen VCC gezogen (über den Pullup-Widerstand). Das führt dazu, dass die fallenden Flanke recht steil sind, aber die steigenden Flanken verschliffen sein können. Grund dafür ist der R-C-Tiefpass aus Pullup-Widerstand und Leitungskapazität. Verschliffene Flanken sind aber nur dann ein Problem, wenn die Taktrate des I2C-Bus so hoch ist, dass der logische High-Pegel nicht genug Zeit hat, auf einen ausreichend hohen Spannungspegel anzusteigen. Dann hilft: 1. Leitungskapazität verkleinern (geht oft nicht) 2. Pullup verkleinern (Minimum siehe Datenblätter der ICs) 3. Taktrate senken
Stephan Maier schrieb: > Oh entschuldigung das mit den Pul-up`s sollte eigentlich bei I2C stehen. > Da kam ich wohl durcheinander beim Tippen. Nicht rechnen, messen ;) Fang mit 10k an und schau Dir die steigende Flanken mit dem Oszi an, wenn alle ICs drannhängen.
Wow vielen vielen Dank für die vielen und scchnellen Antworten :) ich hätte mein Praxissemester bei euch machen sollen ;) Dr. Sommer schrieb: > Du könntest zB einen LPC1100 verwenden, der hat nicht nur den > CAN-Controller, sondern auch den CAN-Transceiver integriert. Außerdem > basiert dieser nicht auf der antiquierten 8051-Architektur sondern ist > ein moderner Cortex-M0. Also Ich dürfte einen Cortex nehmen aber er muss von Silicon Labs kommen und die haben keinen mit CAN :( Somit muss ich halt 25 Transceiver kaufen. Gibt es da unetrschiedlich gute, ich habe nämlich gesehen das es ziemlich viele Varianten von Transceiver gibt?! Chris R. schrieb: > Abschlusswiderstände brauchst du jeweils einen an den beiden Enden der > Busleitung. Idealerweise macht man den Widerstand in > Experimentieraufbauten schaltbar oder als Zwischenstecker. Ist nicht für Full CAN immer 120 Ohm? Chris R. schrieb: > Die Kapazität vom Bus hängt einerseits von den Leitungen (Formeln siehe > Grundstudium der Elektrotechnik ;) ), Habe mein Elektrotechnik 3 Skript schon rausgekramt :D Also meine Produktliste: Für I2C benötige ich: 1x PCA9601DP 1x PCA9614 SDA(Datenleitung), SCL (Taktleitung), GND (Ground) Pull ups Für CAN benötige ich: 25x Transceiver (die Frage ist nur welcher von den vielen) CANH, CANL und Ground Busabschlusswiderstände mit 120 ohm Vielen Dank euch allen ihr seit mir eine grosse Hilfe.
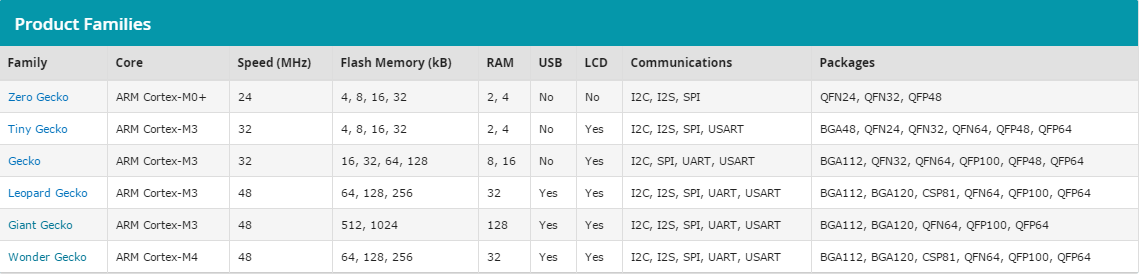
Stephan Maier schrieb: > Also Ich dürfte einen Cortex nehmen aber er muss von Silicon Labs kommen > und die haben keinen mit CAN :( Somit muss ich halt 25 Transceiver > kaufen. Gibt es da unetrschiedlich gute, ich habe nämlich gesehen das es > ziemlich viele Varianten von Transceiver gibt?! Die EFM32 Gecko Mikrocontroller von Silabs haben doch CAN, oder nicht?
Angehängte Dateien:
-

Neues_Bild.png
29 KB
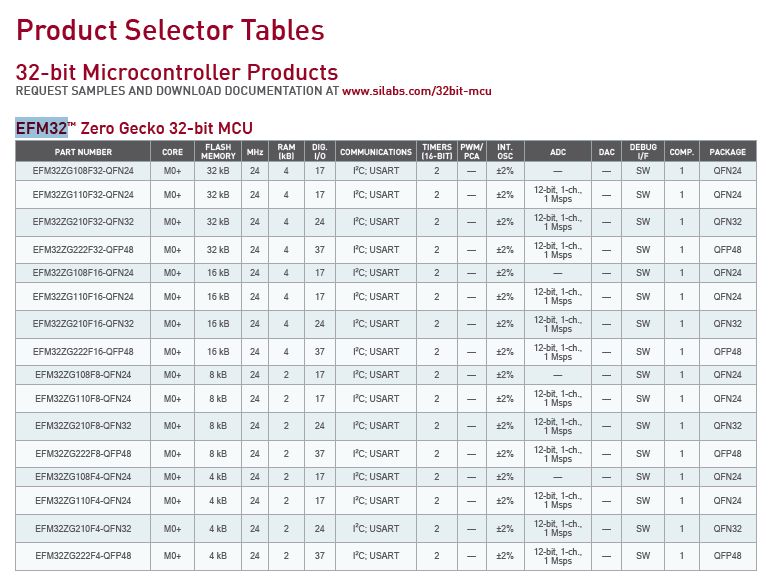
Felix L. schrieb: > Stephan Maier schrieb: >> Also Ich dürfte einen Cortex nehmen aber er muss von Silicon Labs kommen >> und die haben keinen mit CAN :( Somit muss ich halt 25 Transceiver >> kaufen. Gibt es da unetrschiedlich gute, ich habe nämlich gesehen das es >> ziemlich viele Varianten von Transceiver gibt?! > > Die EFM32 Gecko Mikrocontroller von Silabs haben doch CAN, oder nicht? Hmmm ich weis nicht ob ich blind oder einfach zu unerfahren bin :/ aber da steht doch nur USART und I2C.
Angehängte Dateien:
-

Unbenannt.PNG
37 KB
Stephan Maier schrieb: > Hmmm ich weis nicht ob ich blind oder einfach zu unerfahren bin :/ aber > da steht doch nur USART und I2C. Du hast recht, ich dachte das der Wonder Gecko CAN hat. Dann musst du es doch so machen wie oben beschrieben.
Stephan Maier schrieb: > 25x Transceiver (die Frage ist nur welcher von den vielen) Warum nicht die, die jeder verwendet: Bei Controllern mit 5V Versorgungsspannung: PCA82C250 / 251 oder MCP2551 Bei 3,3V Controllerspannung: SN65HVD230 Und schau dir bei 1MBit die Schaltungsempfehlungen der Tranceiver an: Beitrag "Re: Bus über 2-Draht-Leitung"
Kurze ot Frage in die Runde. Wenn ihr den Mcp2515 mit einem 16Mhz taktet, tut ihr das beim mit spi beschaltetem Mikrocontroller auch?
Nicole F. schrieb: > Kurze ot Frage in die Runde. Wenn ihr den Mcp2515 mit einem 16Mhz > taktet, tut ihr das beim mit spi beschaltetem Mikrocontroller auch? Wenn ich am Atmega den UART mitbenutze nehme ich 14,7456 oder 11,0592 MHz.
Hm ich hab grad noch eine Frage, zwecks I2C und CAN. Ich habe nachher meine Mikrocontroller (c8051f580) die für das Bussystem verantwortlich sind. Wenn ich nun noch zusätzlich einen weiteren Mikrocontroller verbaue auf dem Piggyback der für irgendeine Aufgabe zuständig ist (was auch immer), wie kommunizieren die zwei miteinander so dass meine Daten ins Bussystem kommen oder abgefragt werden können? Muss ich da dann wieder ein Bus aufbauen (SPI, UART) zwischen den zwei Mikrocontrollern oder geht das auch einfach.
Verstehe deine Frage nicht ganz: Du hast einen weiteren Controller, der selber nicht am Bus - egal ob CAN oder I2C - hängt, aber trotzdem erreichbar sein soll? Gerade für die Kommunikation von Controllern auf einer Platine untereinander gibt es den schnellen SPI. Du kannst dir aber auch einen eigenen Bus ausdenken.
Angehängte Dateien:
-

Unbenannt12.png
6,1 KB
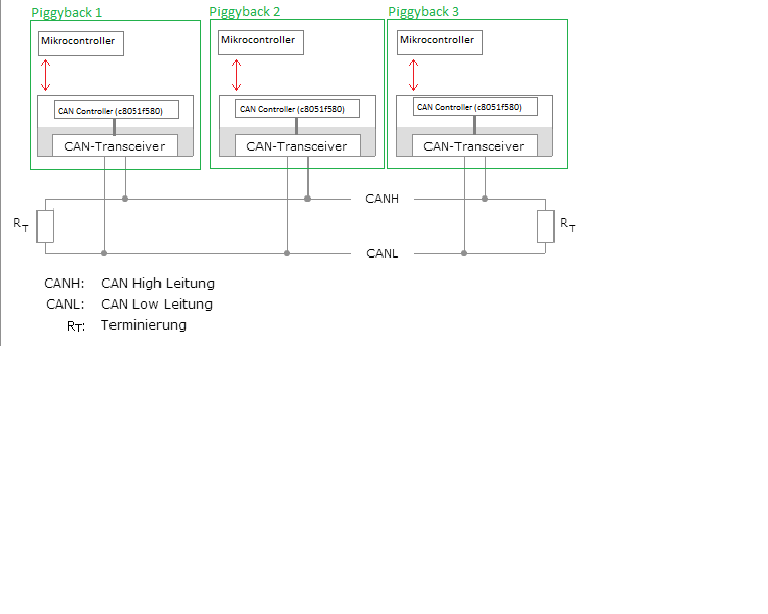
Habe mal ein Bild dazu gezeichnet. Meine Frage ist: Dadurch das ich ja ein Mikrocontroller verwende als CAN Controller habe ich ja nur die vom Prozessor gegebenen Funktionen. Falls ich mal im Spezialfall mehr will und noch ein Cortex auf dem Piggyback dazu schalten (roter Pfeil) möchte aufgrund von Leistung oder weiteren Funktionen, wie mache ich das dann? Muss ich dafür extra wieder ein Bussystem aufbauen (SPI I2C.....) oder gibt es da andere Möglichkeiten.
Stephan Maier schrieb: > Dadurch das ich ja ein Mikrocontroller verwende als CAN Controller habe > ich ja nur die vom Prozessor gegebenen Funktionen. Der von dir gewählte 8051 ist ja nicht der kleinste. Der kann schon einiges. Daher ist nicht klar, was du noch mit einem Cortex zusätzlich anfangen willst? Aber wenn du meinst: Natürlich braucht es wieder irgendeine Verbindung der beiden. Da es nur zwei Teilnehmer sind, reicht auch eine Punkt-zu-Punkt-Verbindung wie RS232. Hängt halt davon ab, wieviel Daten du hin- und herschaufeln willst.
Grundsätzlich möchte ich aber einwenden, dass du eben nach Möglichkeit NICHT einen weiteren Prozessor haben willst. Es ist ein Irrtum zu glauben, dass sich die Dinge immer einfacher gestalten, je mehr Prozessoren im Spiel sind. Denn mit einem zusätzlichen Prozessor handelst du dir automatisch eine weitere Kommunikationsschicht ein, der dein ursprünglich vorhandener Prozessor dann ohnehin noch zusätzlich wuppen muss. > Wenn ich nun noch zusätzlich einen weiteren Mikrocontroller verbaue > auf dem Piggyback der für irgendeine Aufgabe zuständig ist > (was auch immer) Wenn er für eine weitere Aufgabe zuständig ist, warum soll der dann nicht ein eigenes Piggyback für genau diese eine Aufgabe bekommen und er ist CAN-Busteilnehmer wie alle anderen auch?
Angehängte Dateien:
-

Piggyback1.png
50 KB -

Reset.png
12 KB
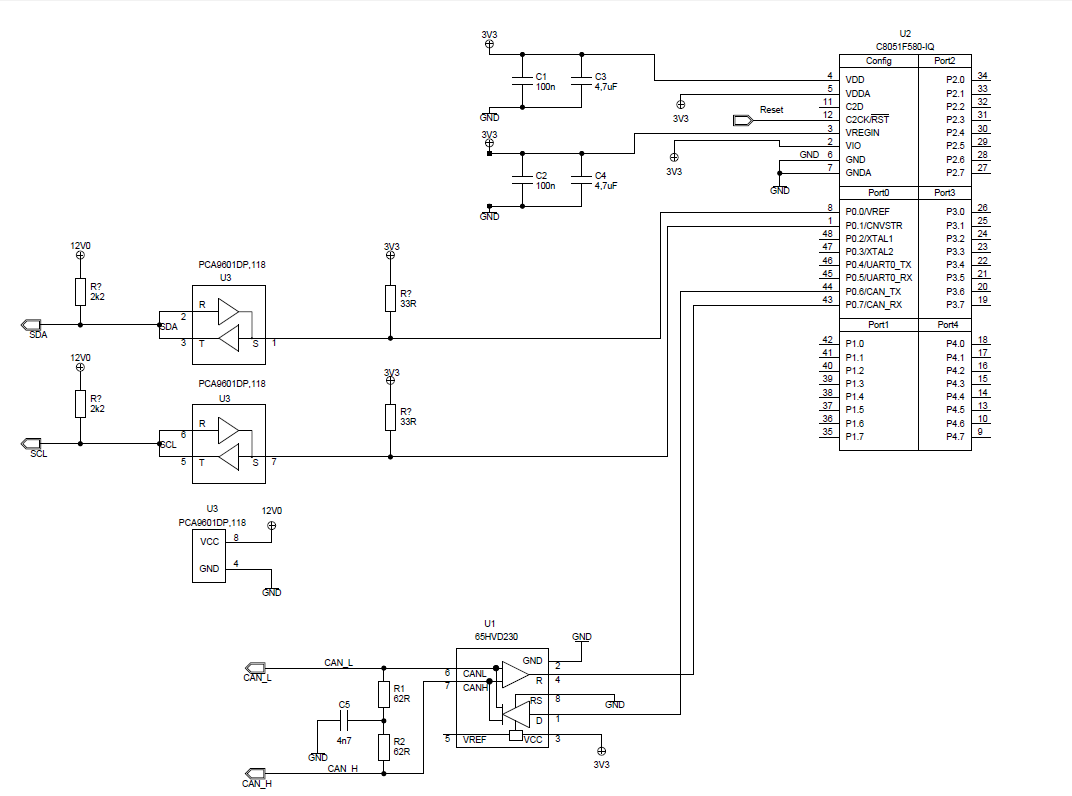
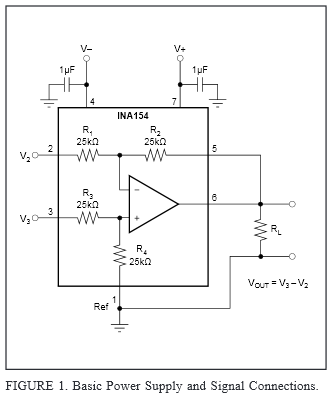
Ja das mit dem zusätzlichen Controller war nur eine theoretische Frage welche mich interessiert hat wie man es lösen würde. So jetzt hoffe ich das ich nicht alles falsch gemacht habe. Ich habe mal ein kleines Schema gezeichnet. Könnt Ihr mir sagen ob das so funktioniert wie ich das gelöst habe? Eine weitere Frage ist, wofür ist das VRef beim CAN-Transceiver. Das wurde mir aus dem Datenblatt nicht ganz ersichtlich. Vielen vielen Dank nochmals für eure Unterstützung :)
Ich habe noch eine weitere Frage. Ich würde gerne die Datenleitung von CAN und I2C anzapfen um die Übertragung mit einer LED sichtbar zu machen. Leider ist es mit nur aus Konstruktionsgründen möglich CAN_H oder CAN_L zu überprüfen. Nun meine Idee, ich benutze einen Differenzenverstärker und ermittle damit die Differenz von CAN_H und CAN_L. Mittels eines Schmitttrigger prüfe ich das Differenzensignal auf über 0-1,5 V = LED aus und 1,5-3,5 Volt = LED an. Wolle es erst mit einem FET machen aber die sind mir zu ungenau was die Schwellenspannung angeht von 1,5V. Bei I2C ist es mir noch nicht so einleuchtend wie ich es machen soll. Villt mit einem Inverter an der SCL Leitung. Vielen Dank für eure Hilfe :)
:
Bearbeitet durch User
Wenn Du Aufwand betreiben willst, kannst Du einen zweiten Transceiver dran hängen und hättest CANRX wieder.
Hast du nicht die Pull-up Widerstände links und rechts vom Bustreiber vertauscht? Und der 33R ist wohl eher ein 330R. Dann stimmts auch mit dem Datenblatt überein. Einen Abblockkondensator dazu kann nicht schaden. VRef am Transceiver kannst du offen lassen. Zum 8051 kann ich dir nichts sagen.
Stephan Maier schrieb: > Ich würde gerne die Datenleitung von > CAN und I2C anzapfen um die Übertragung mit einer LED sichtbar zu > machen. Oben hast du was von 1MBit auf dem CAN geschrieben. Nur mit einer LED wirst du da nichts sehen, die Botschaften sind einfach zu kurz. Schliesse lieber eine oder zwei LED an den 8051 an und zeige Senden und Empfangen per Software an. Den Bus musst du schon mit einem DSO ansehen um was zu sehen. Mach doch mal den Schaltplan fertig.
Hm, ich würde hier noch einiges vorsehen. - Quarz - Abblockkondensatoren an VDDA - Das C2 Debuginterface (Pullup nicht vergessen) - I2C würde ich über die Crossbar eher auf Port 1 verschieben, evtl. braucht man die Externe Refernzspannung doch einmal - Alle nichtbelegten Ports zumindestens auf Stecker, damit man diese später doch mal verwenden kann - Der CAN Transceiver freut sich auch über Abblockkondensatoren - Jumper für CAN Terminierung - HEX-Coderschalter für Node-ID - ein paar Debug LEDs Such dir mal die Doku des Entwicklungskites für diesen Typ, da ist normalerweise auch ein Schaltplan mit enthalten. Evtl. solltest du dir auch den F582 überlegen, der hat auch alles drauf, das QFP-32 Gehäuse hat aber einen größeren Pitch und lässt sich schöner mit der Hand löten. mfg Gast
Super vielen Dank für die zahlreichen Denkanstösse. Ich habe auch alles verstanden was ich noch am besten umsetzen sollte oder verbessern bis auf Gast schrieb: > - Jumper für CAN Terminierung > - HEX-Coderschalter für Node-ID
Stephan Maier schrieb: >> - Jumper für CAN Terminierung Der CAN-Bus hat zwei Abschlusswiderstände, einen an jedem Ende. Da du ja alle Platinen gleich gestalten willst, dürfen die in der Mitte angeordneten CAN-Teilnehmer keinen Widerstand haben. Nun kann man den beim Bestücken einfach weglassen oder aber einlöten und zusätzlich einen Jumper dazu um den dann still zu legen. >> - HEX-Coderschalter für Node-ID Im I2C-Bus hat jedes Gerät eine eigene Geräteadresse. Die kannst du nun fest in die Software reinschreiben, dann braucht aber jede Platine eine eigene Software-Version. Oder der Controller fragt beim Einschalten einen Codierschalter ab und weiß so seine Adresse.
desweiteren habe ich noch eine Frage bezüglich zum JTAG oder C2. Woher finde ich Angaben oder genaue Daten wie ich ein JTAG oder C2 aufbaue. Ich finde leider nichts bis auf den Bericht in mikrocontroller.net
Willst du keine Knöpfe, Taster, LED, oder LCD-Anzeigen auf deinen Platinen vorsehen? Auch wenn dann mal alle Controller miteinander kommunizieren können, steht Mensch davor und langweilt sich, da es keine Möglichkeit gibt mit dem Systen zu interagieren: Keine Knöppe drücken und die Reaktion darauf abwarten...
Angehängte Dateien:
-

Piggyback_Top.png
79 KB
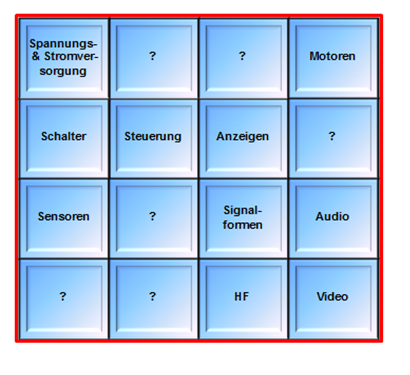
Doch doch das kommt alles noch, jedoch wollte ich erst einmal das Schema für die Grundschaltung (Bussystem, Controller, ...) aufbauen und anschließend den Rest was auf die Piggyback Oberseite kommt hinzufügen. Auf dem Bild kannst du mal Anfänge der Planung sehen was drauf kommt, nur die Stromversorgung wurde anders geregelt als anfänglich geplant.
:
Bearbeitet durch User
Soll das Projekt innerhalb eines Praxissemesters in Hardware fertig werden oder nur durchgeplant? Wenn du Hardware aufbauen und in Betrieb nehmen willst, bist du mit den Grundplatinen und deren Sotware schon gut beschäftigt. Pass auf dass dir nicht die Zeit wegläuft.
Angehängte Dateien:
-

forum_speisungsanzeige.png
12 KB -

Forum_Reset.png
8,7 KB -

forum_piggyback.png
340 KB
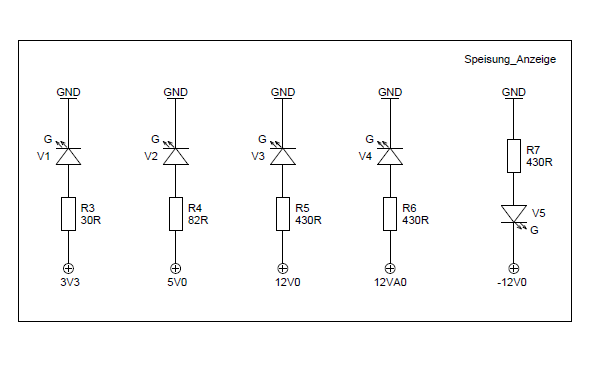
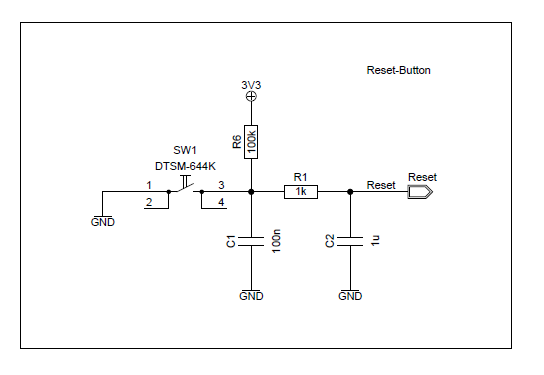
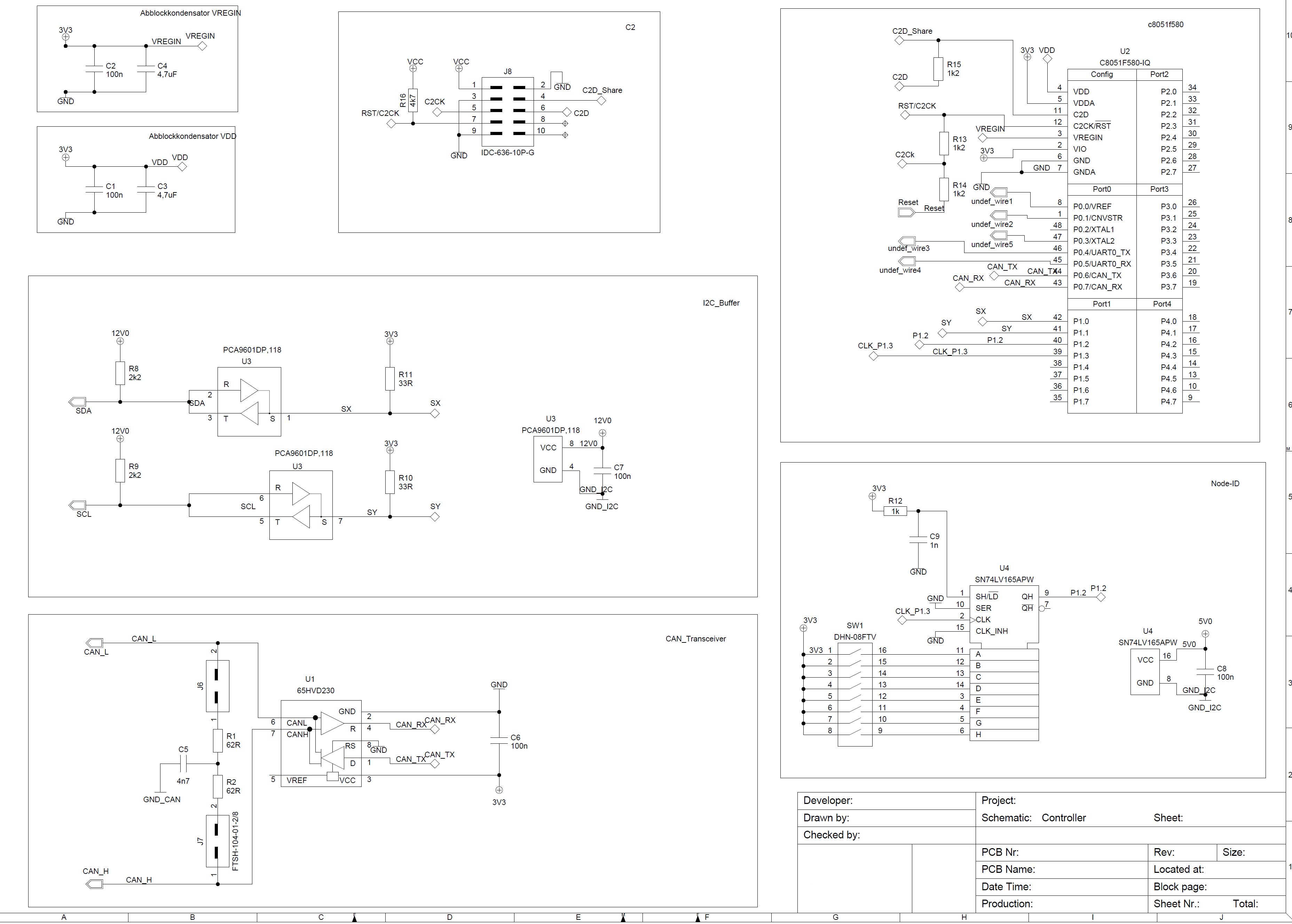
So, ich habe jetzt mal alles so gut wie fertig gestellt. Ich hoffe es passt alles. Oben meintet Ihr ja ich solle es fertig einstellen damit man überhaupt eine Aussage machen kann zu meinem Schema. In den Anlagen ist: Speisung: Dies dient nur zur überprüfung ob auch alle Speisungen vorhanden sind. Reset: Erklärt sich von selbst. Piggyback: In diesem Dokument sind alle wichtigen Bausteine für die Buskommunikation über I2C und deren Node-ID und CAN. Desweiteren noch eine Schnittstelle C2 sowie der Controller selbst. Testpunkte habe ich noch nicht eingezeichnet, die kommen noch! Es wäre toll wenn Ihr mir Kritik sowie bessere Lösungsvorschläge machen könntet. Man lernt bekanntlich am meisten aus Fehlern und guten Ideen anderer. Vielen vielen Dank euch allen.
:
Bearbeitet durch User
Erste eigene Nachbesserung: Node-ID Pull Down`s vergessen. Wenn Schalter nicht geschalten hängt mir der Eingang am Schieberegister in der Luft. Habe Pull Down`s angebracht.
Thomas Forster schrieb: > Hast du nicht die Pull-up Widerstände links und rechts vom Bustreiber > vertauscht? > Und der 33R ist wohl eher ein 330R. Dann stimmts auch mit dem Datenblatt > überein. Willst du bei den Speisungs-LED bei jeder ca. 20mA verbraten? 5-10mA würden sicher auch reichen, einfach als Vorschlag.
Habe die Widerstände neu berechnet und treibe die LED`s nun mit 10mA. Danke für den Hinweis :) Dem VDDA habe ich nachträglich nun auch noch Abblockkondensatoren spendiert.
Angehängte Dateien:
-

Unbenannt.PNG
18 KB -

Unbenannt1.PNG
37 KB
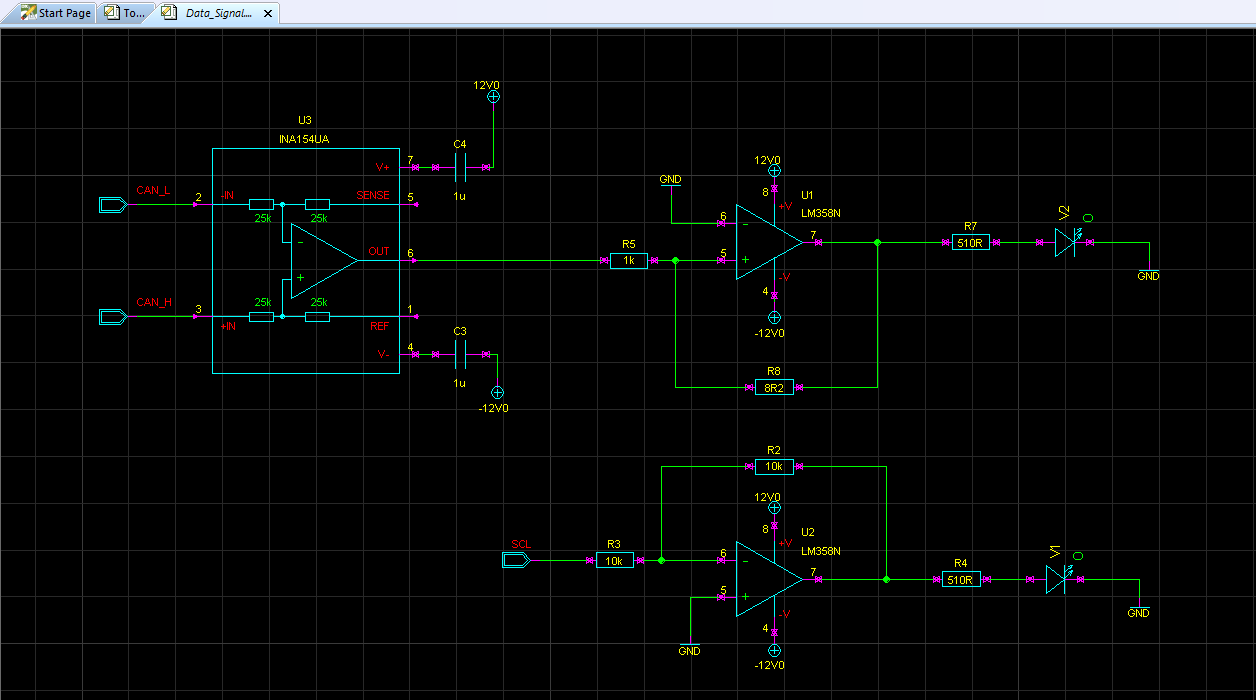
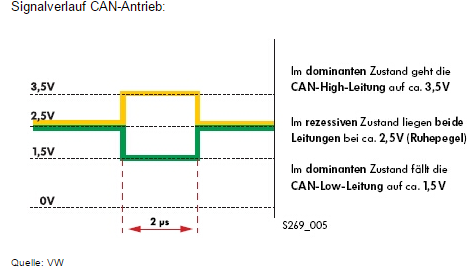
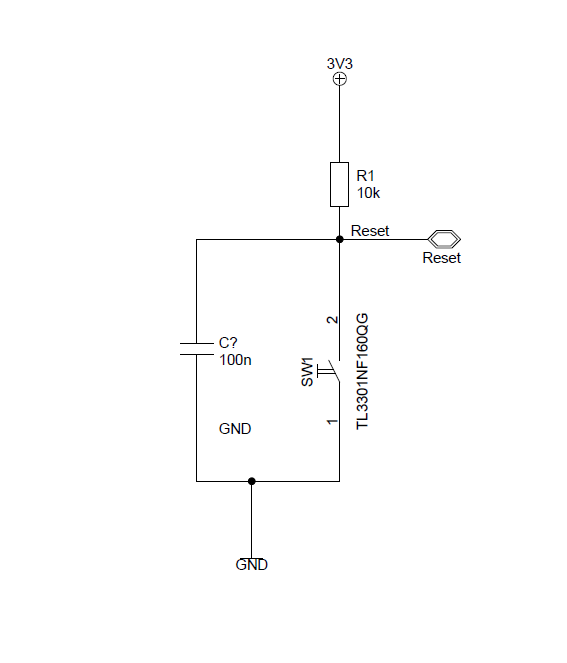
Hallo alle zusammen, ich habe ein weiteres Schema gezeichnet und bin mir diesmal sehr unsicher ob ich das so machen darf und kann. Ich soll laut Aufgabenstellung den Bus auf Aktivität mit einer LED überprüfen. Meine Schaltung ist oben als Bild abgehangen. CAN-BUS Idee, ich ermittle die Differenz mittels einem Differenzenverstärker. Dabei ergeben sich Werte zwischen 0 und 3,5V. Anschliesend führe ich das Differenzensignal auf einen Schmitttrigger welcher eine Schaltschwelle von 1,5V hat. Unter 1,5 ist mein Bus inaktiv alles drüber aktiv. I2C-BUS Idee, ein ganz normaler invertierender Verstärker da Aktiv auf Lowpegel ist und inaktiv auf Highpegel. Ich hoffe man kann es so machen. Vielleicht habt ihr mir ja ein Denkanstoß zu dieser und zu meiner oben gefragten fertigen Schaltung. Vielen Dank euch allen.
was machst du eigentlich wenn auf der 3,3V Leitung 5V anliegen? Deine LED würde melden das alles o.k. ist.
Thomas O. schrieb: > was machst du eigentlich wenn auf der 3,3V Leitung 5V anliegen? Deine > LED würde melden das alles o.k. ist. Ich verstehe leider nicht ganz wie du das meinst?
Thomas Forster schrieb: > Schau dir C3 und C4 in deinem Schaltplan nochmal an. Ohjemine, was hab ich den da für ein Sch... gemacht. Danke :)
Angehängte Dateien:
-

Besipiel_I2c_Paralell.PNG
110 KB
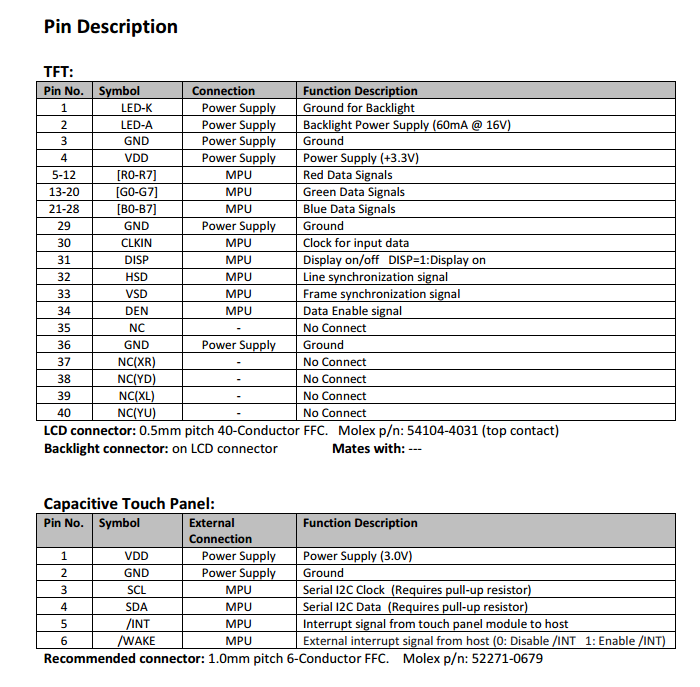
Aber denkt ihr das so alles Funktionieren würde wie ich es bis jetzt geplant habe? Desweiteren hänge ich gerade an einer weiteren Aufgabe fest (das Projekt ist echt heftig merke ich so langsam :D ). Ich soll ein TFT Touch Display 7" auf ein Piggyback setzen auf das alle weiteren Piggybacks Zugriff bekommen können über den I2C-Bus oder CAN-Bus. Nun habe ich "nurnoch" 34 I/O`s frei. Die meisten Display`s haben I2C für das Capacitive Touch und 24 Bit (RGB) für das Display. Theoretisch würde das reichen für meine Zwecke. Jedoch frage ich mich ob das theoretisch auch praktisch umsetzbar ist. Das I2C würde ich halt da es schon vom anderen Bussystem benutzt wird selbst auf ausgewählte I/O`s Programmieren das sollte nicht das Problem darstellen. Was meint Ihr??
:
Bearbeitet durch User
Sawyer Ma schrieb: > Ich soll ein TFT Touch > Display 7" auf ein Piggyback setzen auf das alle weiteren Piggybacks > Zugriff bekommen können über den I2C-Bus oder CAN-Bus. Das ist ein Display ohne Controller. Du brauchst entweder einen Displaycontroller oder einen ARM mit eingebautem Display-Controller.
Thomas Forster schrieb: > Sawyer Ma schrieb: >> Ich soll ein TFT Touch >> Display 7" auf ein Piggyback setzen auf das alle weiteren Piggybacks >> Zugriff bekommen können über den I2C-Bus oder CAN-Bus. > > Das ist ein Display ohne Controller. Du brauchst entweder einen > Displaycontroller oder einen ARM mit eingebautem Display-Controller. Aber ich habe doch auf dem Piggyback ein c8051f580, würde der das nicht schaffen mit noch 34 freien I/o´s? Haben die Displaycontroller einen Vorteil gegenüber meines uC (Geschwindigkeit, Handhabung)? Ich denke mir halt der Displaycontroller muss ja nachher auch wieder irgendwie mit meinem C8051 kommunizieren um an den Bus angebunden zu sein.
:
Bearbeitet durch User
Sawyer Ma schrieb: >> Das ist ein Display ohne Controller. Du brauchst entweder einen >> Displaycontroller oder einen ARM mit eingebautem Display-Controller. > > Aber ich habe doch auf dem Piggyback ein c8051f580, würde der das nicht > schaffen mit noch 34 freien I/o´s? Hm, also dir fehlt sowas wie eine Grafikkarte. Das Display erwartet einen Datenstrom mit 40MHz, Datenblatt Seite 8 oben. Prinzipiell kann man sowas auch ohne Displaycontroller machen: Beitrag "Grafikfähiger LCD Controller für 320x240 LCD mit 4 Graustufen" Ich würde mich da aber nicht dranwagen, mein Respekt an Benedikt!
Ok super danke jetzt hab ich es verstanden was du mir sagen wolltest. Also brauche ich Theoretisch so ein Board wie oben angehangen. Dieses Steuer ich dann über I2C oder sonstiges (kommt ja dann auf das jeweilige Board drauf an) an. Kennt jemand zufällig noch ähnliche Boards mit TFT 7" Display mit Touch (am besten Capacitiv) und am liebsten günstig ;) .
:
Bearbeitet durch User
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.