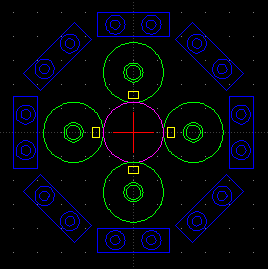
Hallo. Ich versuche grade, eine Schwebevorrichtung zu beschreiben. Der Aufbau ist als Draufsicht im Anhang zu finden und ist folgender: einige Permanentmagnete im Kreis angeordnet, um den Schwebemagneten anzuheben, dazu vier Elektromagneten, um ihn stabil in Position zu halten und vier Hallsensoren, mit denen die Position erfasst wird. Nichts neues also. In vertikaler Richtung ist die Lage des Schwebemagneten ja stabil, auch gegen Rotation um Achsen, die in der xy-Ebene liegen, ist der Magnet stabil. Es muss also nur die Position in x- und y-Richtung geregelt werden. Das funktioniert auch prima mit einem PD-Regler und Ausprobieren. Nun möchte ich das aber nachvollziehen. Die Regelstrecke lässt sich nur schwer experimentell untersuchen, weshalb ich versuche, ein Modell aufzustellen: Da der Magnet nur an einer Stelle schweben soll, nehme ich die Regelstrecke an dem Punkt als linear an. Die Regelstrecke für jeweils x und y besteht ja aus zwei verketteten I-Gliedern, denn das Stellglied, also ein Spulenpaar, bewirkt ja mit seinem B-Feld eine Beschleunigung des Schwebemagneten, welche zur Geschwindigkeit integriert wird, welche wiederum zum Weg integriert wird. Soweit richtig? Der Eingang des Stellgliedes ist PWM, der Ausgang die durch das B-Feld verursachte Kraft, welche auf den Eingang der Regelstrecke als Beschleunigende Kraft einwirkt. Ist folgende herleitung Übertragungsfunktion für die Kombination aus Stellglied und Regelstrecke korrekt? Ü-Funktion des Stellgiedes (PT1) K/(T*s+1) Ü-Funktion der Regelstrecke (Zwei verkettete I) (1/(T*s))*(1/(T*s))=1/(T^2*s^2) Ü-Funktion von Stellglied und Regelstrecke K/(sT^3+Ts^3+T^2+s^2) Jetzt ist es so, dass ich im Rahmen dieses Projekts - es hadelt sich um ein Evaluationsprojekt - mit zusätzlichen Sensoren zusätzlich eine innere Größe der Regelstrecke, nämlich die Geschwindigkeit des Schwebemagneten in x- und y-Richtung abgreife. Details seien hier egal, ich probiere noch an verscheidenen Varianten. Die Ü-Funktion von Stellglied und Regelstrecke ändert sich dadurch ja folgendermaßen: K/(sT^2+Ts^2+T+s) und ist somit eine Ordnung kleiner. Bringt mir das was? Immerhin lasse ich damit ja auch einen Teil der Strecke unbeachtet. Kann man das so einfach machen? Mit dieser inneren Größe allein kann ich ja die Absolute Position des Schwebemagneten nicht bzw. nur mit starker Drift bestimmen. Wenn ich diese Größe also nutzen möchte, dann ja in Kombination mit dem Signal der Hallsensoren. Jetzt ist die Frage, wie ich diese Daten am besten fusioniere. Kalman-Filter? Oder kann man sowas wie einen PID-Regler machen, bei dem man dem I-Teil nur das Signal aus den Hallsensoren zuführt? Braucht man in so einem Fall überhaupt einen D-Anteil? Ich muss sagen, dass ich nicht wirklich tief drin stecke in der Regelungstechnik, entschuldigt also, das das hier alles etwas wackelig ist.
Angehängte Dateien:
:
Bearbeitet durch User
Md M. schrieb: > Die Ü-Funktion von Stellglied und Regelstrecke ändert sich dadurch ja > folgendermaßen: > K/(sT^2+Ts^2+T+s) > > und ist somit eine Ordnung kleiner. Bringt mir das was? Immerhin lasse > ich damit ja auch einen Teil der Strecke unbeachtet. Kann man das so > einfach machen? Das kann man so pauschal wohl nicht beantworten. Bei stabilen System ist es ja normal, das System ganz dreist zu einem System 2. der sogar 1. Ordnung zu vereinfachen. Bei instabilen System gibts da sicherlich schon eher Probleme. Ich verstehe nicht, warum du nicht ein paar (oder wenigstens eine) Sprungantwort einfach mal aufzeichnest und hier veröffentlichst. Daran sollte man erkennen können, wie eine vereinfachte Übertragungsfunktion ungefähr aussehen könnte.
Signal-Siggi schrieb: > Md M. schrieb: >> Die Ü-Funktion von Stellglied und Regelstrecke ändert sich dadurch ja >> folgendermaßen: >> K/(sT^2+Ts^2+T+s) >> >> und ist somit eine Ordnung kleiner. Bringt mir das was? Immerhin lasse >> ich damit ja auch einen Teil der Strecke unbeachtet. Kann man das so >> einfach machen? > > Das kann man so pauschal wohl nicht beantworten. Bei stabilen System ist > es ja normal, das System ganz dreist zu einem System 2. der sogar 1. > Ordnung zu vereinfachen. Der Punkt ist ja, dass normalerweise ja die Strecke in einem Arbeitspunkt vereinfacht wird. In meinem Fall täte ich das ja aber nicht, sondern würde einfach Daten aus der "Mitte" der Regelstrecke verwenden. > Ich verstehe nicht, warum du nicht ein paar (oder wenigstens eine) > Sprungantwort einfach mal aufzeichnest und hier veröffentlichst. Daran > sollte man erkennen können, wie eine vereinfachte Übertragungsfunktion > ungefähr aussehen könnte. Ich weiß halt nicht, wie ich das machen könnte. Die Regelstrecke ist ja instabil. Um eine Sprungantwort zu erhalten, müsste der Magnet schon in seiner Position schweben. Das geht halt nicht. Denkbar wär, dass ich den Magneten an seiner Soll-Position fixiere und ihn zudem z.B. mit Gummibändern aufhänge. Dann könnte ich eine Sprungantwort messen und müsste später irgendwie die Gummibänder wieder herausrechnen. Für diese müsste ich aber auch erst ein Modell erstellen. Deshalb fand ich den Weg einfacher, mir die Strecke einfach zusammenzureimen.
Hast Du einen funktionierenden Aufbau? Ich habs mal probiert, ich bekomme die Regelkreise aber nicht stabil. Da würde ich mich über die Erfahrungen anderer freuen!
Martin O. schrieb: > Hast Du einen funktionierenden Aufbau? Ich habe einen funktionierenden Aufbau, ja. Hatten wir ja auch hier schonmal Beitrag "Magnetic Levitation" > Ich habs mal probiert, ich bekomme die Regelkreise aber nicht stabil. > Da würde ich mich über die Erfahrungen anderer freuen! Mit praktischen Erfahrung kann ich dienen. Beschreibe doch deinen Aufbau mal grob oder zeig eine Skizze. Wie schnell ist deine Regelschleife? Hat sie Jitter, z.B. durch if-Zweige? Magst du Code zeigen? Wie groß ist deine PWM-Frequenz? Was genau kommt am ADC an? Wenn du schon an Regelparametern drehst, gehe ich mal davon aus, dass du schon diese "Mulde" fühlen kannst, wenn du den Magnet in die Sollposition hältst und er anfängt zu zappeln, wenn du ihn loslässt, Korrekt? Die gängigen "Einstellverfahren für den Praktiker" funktionieren nicht, weil man nicht mit kleinem P und gar keinem D anfangen kann, denn mit zu kleinem P bleibt der Magnet nicht in Position und mit keinem D zappelt er. Der D-Parameter ist wohl der kritische Teil, denn er ist nicht nur quasi die aktive Dämpfung, sondern leitet ja auch sämtliche hochfrequente Störungen wieder in den Kreis, das sorgt für Unruhe. Diese Störungen könnten z.B. von den Spulen selbst kommen. Wenn du da nicht aufwändig filtern kannst/willst, kann ich dir empfehlen, die Spulen kurz vor dem sampling der Werte von den Hallsensoren abzuschalten und danach wieder anzuschalten. Außerdem würde ich die PWM-Frequenz hoch wählen, sodass das Feld der Spule nicht jedesmal komplett zusammenbricht. Versuch außerdem mal, komplett ohne D anzufangen und P groß zu machen, oder mach gleich eine Zweipunktregelung (?) draus, also wenn Abweichung<0 volle Power in die eine Richtung, wenn Abweichung>0 volle Power in die andere Richtung, wenn Abweichung 0 dann nix. Dazu platzierst du massenhaft Aluminium als passive Dämpfung in der Nähe des Magneten. Bei mir haben Aluplatten gut funktioniert, die ich einfach im Abstand von ein paar Milimetern unter oder über den Magneten plaziert habe. Wenn der Magnet klein genug ist, kannst du auch einfach eine Rolle Alufolie in die Mitte stellen und den Magnet da rein tun und dann mal oben reingucken. Wenn das geht, weißt du auf jeden Fall schonmal, dass dein Aufbau grundsätzlich (ohne Alu) funktionieren könnte, wenn du die passive Dämpfung durch aktive Dämpfung ersetzen kannst, deine Spulen Also schnell genug Kraft-Spitzen erzeugen können. Das wird bei Spulen mit großem L vermutlich zunehmend schwieriger. Vielleicht hilft es, den Schwebemagneten träger zu machen, auch in der Drehung, z.B. mit ein paar langen Auslegern oder einer Scheibe oder sowas. Da musst du rumexperimentieren.
:
Bearbeitet durch User
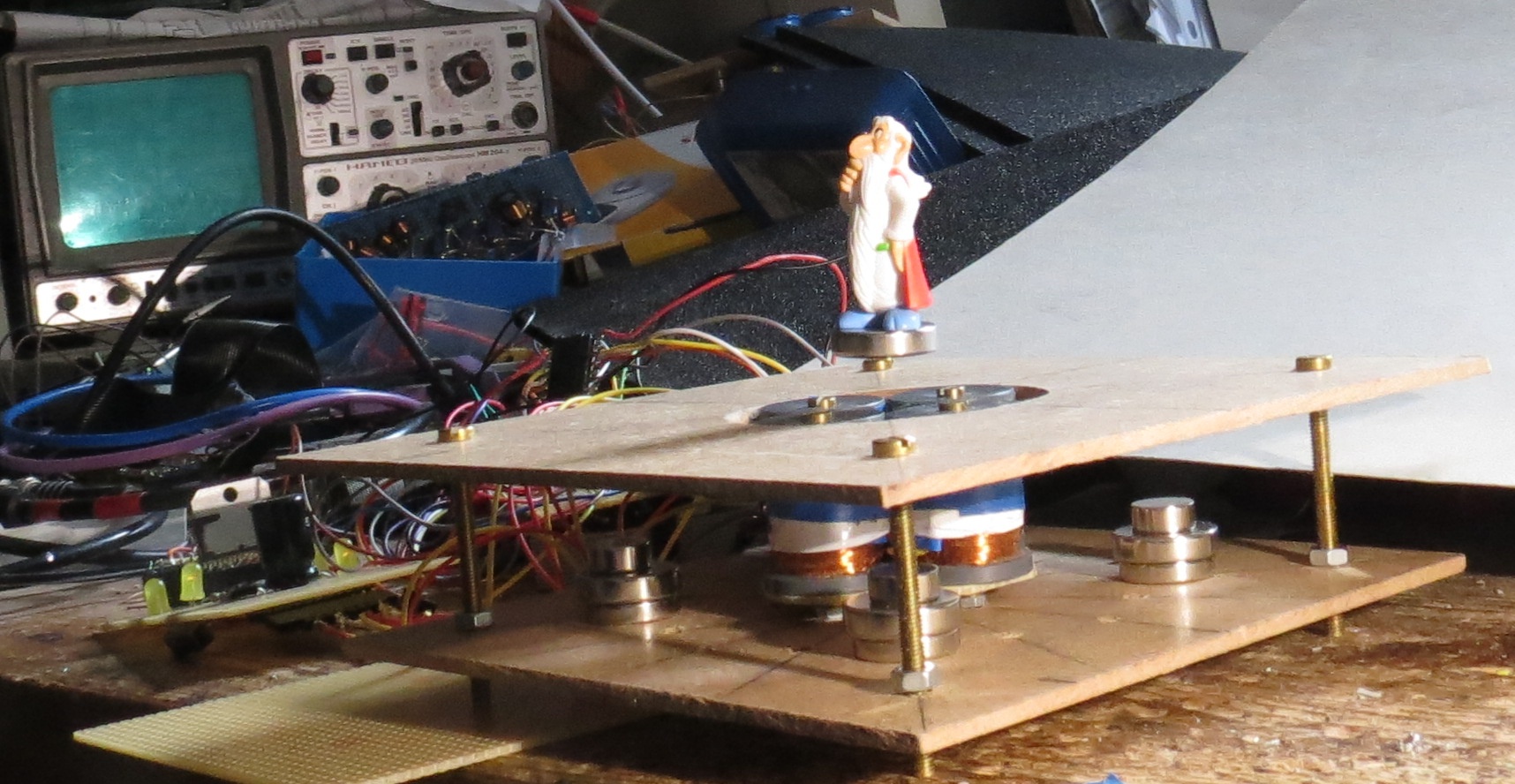
Krankheitsbedingt komme ich an die echte Hardware momentan nicht heran, ich versuche mal meinen Aufbau und Erfahrungen zu schildern: Äußerer Magnet= ( FE-R-100-60-20 Ringmagnet Ø 100/60 mm, Höhe 20 mm Ferrit, Y35, unbeschichtet) Als Schwebemagnet nehm ich einen Neodym Rundmagneten 20mm Durchmesser, 6mm hoch Ich kann oberhalb in der Mitte des Rundmagneten gut die Abstossung fühlen. Elektromagnetanordnung wie folgt: 4 Spulen, ca. 25mm äußerer Durchmesser, Höhe ca 40mm, vollbewickelt mit 0.3mm CuL. Je zwei gegenübereinanderliegende Spulen antiseriell geschaltet. Die beiden Spulenpaare werden (via L298) mit einer 10 Bit PWM von 20kHz bestromt (20 Volt, max 1A), negativ wie positiv. In der Miitte zwischen den Spulen habe ich 2 Hallelemente, für jedes Spulenpaar eins. Ein Atmel mit 20MHz arbeitet als Regler. Abtatstrate dürfte ca 1kHz sein. Wenn ich alleine die Elektromagneten nehme, ohne Ringmagnet,und stelle den D-Anteil des Reglers auf Null, dann spüre ich bei kleinem P Anteil die Regelung, so dass der Schwebemagnet sozusagen in die Nullposition "einrastet". Drehe ich den P Anteil zu hoch, wird der Regler instabil. Durch zufügen des passenden D Teils kann ich ihn dann wieder stabilisieren. Wenn ich jetzt den Ringmagneten zusätzlich benutze, reicht ein kleiner P Anteil nicht, un den Magneten in der Mitte zu halten. (Die radiale Ringmagnetkraft scheint gefährlich zu sein). Wenn ich dann P und D passend aufdrehe, so dass meine Finger das Gefühl haben, die Position wird optimal stabilisiert, dann fängt der Magnet sofort stark an zu Zappeln und auszubrechen, wenn ich ihn loslasse. Ich bekomme ihn also nicht wirklich zum freien Schweben. Vieleicht ist euch ja direkt klar, was ich falsch mache....
Martin O. schrieb: > Äußerer Magnet= ( FE-R-100-60-20 Ringmagnet Ø 100/60 mm, > Höhe 20 mm Ferrit, Y35, unbeschichtet) > > Als Schwebemagnet nehm ich einen Neodym Rundmagneten > 20mm Durchmesser, 6mm hoch Wie hoch schwebt der Magnet dabei? > Elektromagnetanordnung wie folgt: > 4 Spulen, ca. 25mm äußerer Durchmesser, Höhe ca 40mm, vollbewickelt mit > 0.3mm CuL. Klingt nach vielen Windungen. Möglicherweise zu viele, kann ich aber nichts sicheres zu sagen. Ich habe etwa 400 Windungen 0.3mm CuL auf einen Wickelkörper mit 6mm Durchmesser und 20mm Länge gewickelt. Sie hat dann einen Durchmesser von ebenfalls 25mm. > Je zwei gegenübereinanderliegende Spulen antiseriell Geht zumindest grundsätzlich, hab ich auch schon gemacht. > geschaltet. Die beiden Spulenpaare werden (via L298) mit einer 10 Bit > PWM von 20kHz bestromt (20 Volt, max 1A), negativ wie positiv. In der > Miitte zwischen den Spulen habe ich 2 Hallelemente, für jedes Spulenpaar > eins. Hm, da hätte ich lieber in jede Richtung zwei benutzt und dann voneinander subtrahiert. Denn so werden auch Auslenkungen in z-Richtungen als Auslenkungen in x- und y-Richtung interpretiert. Das kann nicht gut sein. Welchen Typ benutzt du? > Ein Atmel mit 20MHz arbeitet als Regler. Abtatstrate dürfte ca 1kHz > sein. Mach das mal langsamer. Ich habe Loop-Frequenzen runter bis 80Hz benutzt. Du bist zwar nicht unbedingt zu nah, aber doch ziemlich nah an der PWM-Frequenz. > Wenn ich alleine die Elektromagneten nehme, ohne Ringmagnet,und stelle > den D-Anteil des Reglers auf Null, dann spüre ich bei kleinem P Anteil > die Regelung, so dass der Schwebemagnet sozusagen in die Nullposition > "einrastet". Das verstehe ich nicht. Wenn du die Spulen jeweils antiseriell verschaltet hast, können sie auf den Magneten keine auftreibende Kraft ausüben. > Drehe ich den P Anteil zu hoch, wird der Regler instabil. Wie das? Deinen Magneten hat es doch bis hierher noch gar nicht in der Luft gehalten ohne Stützmagneten. > Durch zufügen des passenden D Teils kann ich ihn dann wieder > stabilisieren. Du hast also echt stabiles Schweben nur mit Elektromagneten? > Wenn ich jetzt den Ringmagneten zusätzlich benutze, reicht ein kleiner P > Anteil nicht, un den Magneten in der Mitte zu halten. (Die radiale > Ringmagnetkraft scheint gefährlich zu sein). Wenn ich dann P und D > passend aufdrehe, so dass meine Finger das Gefühl haben, die Position > wird optimal stabilisiert, dann fängt der Magnet sofort stark an zu > Zappeln und auszubrechen, wenn ich ihn loslasse. Ich bekomme ihn also > nicht wirklich zum freien Schweben. Mir ist der Ringmagnet suspekt. Hat er seinen Nordpol nach unten oder nach oben? Und dein Schwebemagnet? Sie müssen gleich ausgerichtet sein, denn ansonsten bekommst du noch ein Freiheitsgrad hinzu, der geregelt werden muss, nämlich die Rotation. Das dürfte die Ordnung der Regelstrecke ändern. Wenn du die Spulen mal abgeschaltet lässt und deinen Schwebemagneten in seine Position hältst, versucht er sich dann zu drehen? Sollte er nicht. Vielleicht sind einzelne Stützmagnete etwas weiter weg vom Zentrum besser.
:
Bearbeitet durch User
Hab mich bei der Situation "Nur Elektromagnete" wohl schlecht ausgedrückt: In x-y Richtung merke ich den Regelcharakter. In Z Richtung halte ich den Magneten, ich kann ihn auch an einem Faden quasi als Pendel aufhängen. Dann wird die Position stabilisiert. N-Pol vom Ringmagnet zeigt in gleiche Richtung wie N-Pol vom Schwebemagnet. Schwebemagnet würde so in ca. 4cm Höhe schweben wollen.
Aha, alles klar.
> Schwebemagnet würde so in ca. 4cm Höhe schweben wollen.
Abstand von den Hallsensoren oder der Grundplatte? Wenn Hallsensoren,
dann könnte das zu hoch sein. Ich habe immer ca. 4cm Abstand von der
Grundplatte und habe außerdem die Spulen weiter außeinander. Zumindest,
wenn du deine 25mm-Spulen in dem 60mm-Loch des Ringmagneten platzierst.
Auf dem Bild im Eingangspost habe ich einen Abstand der Zentren zweier
gegenüberligenden Spulen von 5cm. Außerdem wird dann ja auch die
Änderung des Feldes am Hallsensor kleiner. Vielleicht liegen auch deine
Sensoren zu weit im Zentrum. Wie gibst du das Signal überhaupt auf den
uC? Passt du den Gleichanteil und Verstärkung an den ADC an? Wenn ja,
wie? Denn dabei holt man sich u.U. massig Rauschen rein. Um den Magneten
abzusenken, würde ich in deinem Fall mit einer Stahlschraube oder so von
unten kommen.
:
Bearbeitet durch User
Die Sulen ragen aus dem Ringmagneten empor so dass der Schwebemagnet von den Spulen und Hall-Elementen einen Abstand von ca 6-8 mm hat, und vom Ringmagneten ca. 40mm. Die Hallelemente erzeugen ein Signal von ca 0v bis ca 5V "ratiometrisch zur Versorgungsspannung" und das geht direkt an die ADC Eingänge mit Vref=Vcc.
Ich wüsste jetzt nicht, dass du irgendwas prinzipielles falsch machst. Ich würde wie gesagt mit einer Rolle Alufolie testen, ob da überhaupt was geht, und dann auch mal gucken, was wirklich am ADC ankommt, wenn man den Magneten nur Milimeter bewegt. Nutzt ja nix, wenn im Normalbetrieb hinten nur die letzte Stelle sich um 1 ändert. Oder nächste Idee: Sperr den Magneten in ein Röhrchen ein, sodass er in einem Bereich bleibt, wo im Normalbetrieb noch Stabilität gegen Versatz herrscht, also am besten wenn der Magnet nur wenige mm Platz hat, sich zu bewegen. Dann automatisiert in Schritten P ändern und dazwischen immer D durch-tunen. Dabei Kurve vom der Regelabweichung aufzeichnen und schauen, wo sie sich nahe 0 bewegt.
Hat denn wirklich niemand sonst eine Idee zu meinem Problem? Würde mir schon helfen, wenn jemand zumindest Teile meiner Annahmen bestätigen oder auch begründet anzweifeln würde.
Frohe Botschaft: Der Magnet schwebt jetzt. Ich habe jetzt 4 Hallelemente verschaltet, jeweils paarweise wird die Differenz als Fehlergröße gebildet. Damit schwebt der Magnet momentan in ca 8 mm über den Elektromagneten. Besten Dank für die Anregungen!
Ich hab jetzt mal ein wenig über die Modellierung nachgedacht. Den Magneten im Feld würd ich durch zweifache Integration beschreiben, wie Du das auch schon vorgeschlagen hast. Den Magneten mit PWM würd ich als Konstante beschreiben, um das Modell so einfach wie möglich zu halten. Dann kommt der Regler selbst. Wenn Du die Ableitung durch Differenzenbildung der Position x bestimmst sieht der Regler so aus: r=K_p*x+K_d*(x(k)-x(k-1))/DeltaT Du sagst nun, Du kannst die Geschwindigkeit selbst messen, nenne sie v, dann könnte man Regeln: r=K_p*x+K_d*v oder man nimmt einen Teil der Geschwindigkeit aus der Differenz, und einen Teil aus der direkten Messung: r=K_p*x+k_d( alpha*(x(k)-x(k-1))/DeltaT+ (1-alpha)*v) mit alpha im Bereich von 0..1 stellst Du ein, wie stark die verschiedenen Anteile gewichtet werden. Ich könnte mir vorstellen dass ein gemessenes v einen besseren (stabileren, wenige rauschenden) Regler ergibt, weil die Differenzbildung immer eine unangenehme Operation ist.
Danke für deine Überlegungen, klingt interessant. Bin grade knapp, aber ganz kurz > Den > Magneten mit PWM würd ich als Konstante beschreiben, um das > Modell so einfach wie möglich zu halten. Kann man das einfach so? Ist ja immerhin eigentlich ein PT1-Glied. Oder kann man die Zeitkonstante vernachlässigen weil sie klein ist? Deine Ausführungen schaue ich mir heute Nachmittag nochmal genauer an, hatte noch keinen Kaffee.
Dieses Patent ist ganz interessant: US020070170798A1 Es enthält einige (Differential-) Gleichungen zur Modellierung und eine Reihe von Anordnungen. Dies Patent ist auch interessant: WO002010150207A1
Bei einigen dieser "Repulsive levitation" Systeme sieht man, dass die Hallsensoren waagerecht auf den Spulen angebracht sind. Das klappt bei mir gar nicht, weil der starke Magnet, der die Schwebekraft erzeugt, mit seinem senkrechten Magnetfeld die Hallsensoren sofort in die Sättigung bringt. Mit senkrecht angeordneten Hallelementen am Rand der Elektromagnete klappt mein System. Irgendwelche Kommentare/Hinweise warum bei anderen waagerechte Hallelemente funktionieren?
Hi, erstmal danke für deine Denkanstöße zur Modellierung, das klingt interessant. Wegen der Patente: Wo genau kann man die einsehen? Ich finde sie nicht. Die Ausrichtung des Hallsensors um (diese) eine der Achsen dürfte doch eigentlich egal sein. Wichtig ist doch nicht, dass die Feldlinien senkrecht zur Oberfläche des Sensors sind, sondern senkrecht zum Stromfluss im Sensor. Oder verstehe ich nicht, was du meinst? Hab wie gesagt die Bilder nicht gesehen. Hast du eigentlich deinen Aufbau mal simuliert? Da du einen Ringmagneten hast, kannst du z.B. in FEMM den Stützmagneten und den Schwebemagneten zusammen um die Mittelachse ziemlich genau simulieren nehme ich an. Könnte vielleicht aufschlussreich sein.
Patente findet man gut mit der "Einsteigerrecherche" von depatisnet.de Ich hab Ring- + Schwebemagnet mal in FEMM simuliert, hilft aber nicht viel, weil man nur die senkrechte Schwebekraft ermitteln kann, nicht aber die Kräfte wenn der Magnet nicht in der Mittelposition ist.
:
Bearbeitet durch User
Ok. Ich dachte vielleicht lässt sich in der Simulation im B-Feld eine optimale Position für die Hallsensoren ausmachen bzw. sieht man, wo sie in jedem Fall ungünstig sind. Denn das habe ich auch noch vor mir. Ich muss ja in meinem Projekt (ist fürs Studium) auch herleiten, warum ich die Sensoren da platziert habe, wo sie sind. Das Patent mit den Gleichungen ist wirklich spannend, das zieh ich mir jetzt erstmal rein.
:
Bearbeitet durch User
Jo, ich vermute, dass man den Sensor beliebig um diese Achse
___
| |
---|---|----
|___|
|||
drehen kann. Entscheident ist der Abstand, nicht die Ausrichtung. Wenn
man von den Stützmagneten weg muss, platziert man sie mehr Richtung
Mitte, dann kann man sie natürlich hinstellen, wenn das platzmäßig
abesser geht. Wenn man die Sensoren aber weiter nach außen haben will,
muss man sie zwangsläufig auf die Spulen packen, und da legt man sie
natürlich hin. Hab ich auch so gemacht, sie mein Bild im Eingangspost.
Ich benutze ss495a Sensoren. Stell Dir bei deiner ASCII-Skizze ein Magnetfeld vor, das senkrecht aus der Zeichenebene heraustritt. Dann hängt das Signal des Hall Sensors vom Winkel (bei Drehung um deine Achse) ab, weil der Nord-Süd Vektor des ss495a mehr oder weniger senkrecht oder parallel ist.
Martin O. schrieb: > Ich benutze ss495a Sensoren. Jo, ich auch. > Stell Dir bei deiner ASCII-Skizze ein > Magnetfeld vor, das senkrecht aus der Zeichenebene heraustritt. > Dann hängt das Signal des Hall Sensors vom Winkel (bei Drehung um > deine Achse) ab, weil der Nord-Süd Vektor des ss495a mehr oder > weniger senkrecht oder parallel ist. Es hängt mMn ja eben nicht vom Winkel zwischen Feldlinien und Nord-Süd-Vektor ab, sondern vom Winkel zwischen Feldlinien und Stromfluss, und der ist eben die Achse, die ich in der Skizze gezeigt habe. Und um diese Achse kann man natürlich drehen, ohne dass sich der Winkel zum Stromfluss ändert. Ich werde das aber bei Gelegenheit nochmal überprüfen, schwören, dass es so ist würde ich nämlich auch nicht, aber ich gehe irgendwie schwer davon aus. Denn dass der Sensore in den Skizzen wie z.B. hier https://de.wikipedia.org/wiki/Hall-Sensor als Platte dargestellt wird, kann keine prinzipielle Bedeutung haben, es könnte genausogut ein runder Leiter sein. Denn selbst wenn man diese Platte um besagte "Strom-Achse" dreht, ändert sich der Winkel zum Stromfluss nicht, egal welchen Winkel die Feldlinen in Nord-Süd-Richtung zur Stirnseite des Bauteils haben.
:
Bearbeitet durch User
"sondern vom Winkel zwischen Feldlinien und Stromfluss," Glaub ich nicht. Das Hall-Element-Plättchen definiert zwei Vektoren: a) Vektor des Stromflsses X b) Vektor der Spannungs (E-feld) messung Y Gemessen wird das B-Feld in (X x Y) Richtung (Vektorprodukt), (X x Y) hat die Richtung des Flächenvektors des Plättchens. Wenn Du um X drehst, ändert sich der Winkel wischen B und Y.
:
Bearbeitet durch User
Jetzt funktioniert mein Setup auch mit flachliegenden Hallsensoren. Fehler war in der Software.
Und ich kapiere jetzt, warum du natürlich Recht hast mit dem Hallsensor.
Eine gewisse Einsicht in das Verhalten des geschlossenen Regelkreises kann man erhalten, indem man im Programm den Sollwert ab und zu sprungartig ändert. Dann sieht man die Reaktion des Schwebenden Teils und kann an den Magnetsensoren die Messgröße ablesen.
Hab deinen letzten Post völlig übersehen. Ja, mit sowas habe ich zwischendurch auch schon rumprobiert. Hatte in dem Projekt eine Pause eingelegt, muss mich da Tage mal wieder dran machen. Letzte große Neuerung war bei mit in der Tat eine bequeme GUI, um genau sowas machen zu können, auch mit Programmierbaren Abläufen.
:
Bearbeitet durch User
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.