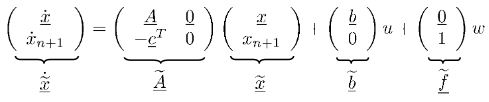
Hallo zusammen, ich habe in meinem Modell "Inverses Pendel" zwei Ausgangsgrößen und möchte diese zurückführen und integrieren, um damit die stationäre Regelabweichung zu verhindern. Mit einer der Ausgangsgrößen habe ich es hinbekommen. Das Zustandsraummodell hat jetzt die Form wie im Bild. Jetzt habe ich aber zwei Ausgangsgrößen. Kann mir jemand vielleicht helfen, entweder Literatur empfehlen oder einen Tipp geben, wie sich das Zustandsraummodell verändert? Danke
Angehängte Dateien:
-

Unbenannt.JPG
16 KB
:
Verschoben durch Moderator
Du baust quasi um dein Zustandsraummodell einen Regelkreis mit I-Regler. Wozu? Lege doch einen entsprechenden Vorfilter aus und platziere die Pole in der linken komplexen Halbebene. Literatur: Lunze - Regelungstechnik 2 und Föllinger - Regelungstechnik
LTI schrieb: > Du baust quasi um dein Zustandsraummodell einen Regelkreis mit I-Regler. > Wozu? Lege doch einen entsprechenden Vorfilter aus und platziere die > Pole in der linken komplexen Halbebene. Du hast nicht verstanden was er vorhat. Es will die stationäre Regelabweichung ausregeln. Eine Zustandsregelung (Luegenberger Beobachter) ist nichts anderes als ein PD-Regler, somit ist immer eine Regelabweichung vorhanden. Es reicht schon aus, wenn der Tisch schief ist oder eine Umwucht in den Antrieb vorherrscht. Irgendwie muss der I-Anteil rein in den Regler, ohne aber dabei die Dynamik zu stören. Ich habe verschiedene Ansatz Modelle bei Lutz Wendt gesehen. Das Buch hat aber jeder im Schrank :) mfg
Stichwörter sind: PI Zuszandsregelung ( PI-Regler übetlagert) oder Zustandsregelung mit Störgrößenaufscjaltung (augmentiertes System erforderlich). Bei beseitigen die stationäre Ungenauigkeit.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.