Hallo Leute, ich messe meine Beschleunigung und Winkel. Bei meinem Beschleunigungssensor habe ich immer einen Drift in X-Richtung(Fahrzeuglängsachse). Der Drift ist immer da aber immer unbekannt hoch und wenn ich mit dem Fahrzeug am Berg stehe und die Beschleunigung in X-Richtung 0 (z.B ich stehe) ist soll er mir auch in X-Richtung 0 ausgeben und nicht noch den Anteil von der Erdbeschleunigung. Jetzt hab ich mich natürlich erkundigt und bin auf den Kalman Filter gestoßen. Das wäre auch schon meine erste Frage bin ich damit richtig? kann ich sowas überhaupt schätzen? Wenn ich am Berg stehe ist ja meine Winkelbeschleunigung 0, Geschwindigkeit 0 und meine Beschleunigung. Danke schonmal :) Grüße
Matthias H. schrieb: > ich messe meine Beschleunigung und Winkel. Winkel oder Winkelgeschwindigkeit? Matthias H. schrieb: > Wenn ich am Berg stehe ist ja meine > Winkelbeschleunigung 0, Geschwindigkeit 0 und meine Beschleunigung. Der Beschleunigungssensor misst im Stillstand die Erdbeschleunigung. Man kann somit die Lage berechnen, wenn man 2 Vektoren gegeben hat. In deinem Fall ist einer dieser Vektoren der g-Vektor. Ein Magnetometer könnte als zweiter Vektor dienen. Wenn du wirklich, wie von dir geschrieben, schon Winkel misst => umso besser : siehe nächster Punkt Matthias H. schrieb: > Der Drift ist immer da aber immer > unbekannt hoch und wenn ich mit dem Fahrzeug am Berg stehe und die > Beschleunigung in X-Richtung 0 (z.B ich stehe) ist soll er mir auch in > X-Richtung 0 ausgeben und nicht noch den Anteil von der > Erdbeschleunigung. Im Grunde hast du 2 Koordinatensysteme: Fahrzeug und "Erde". Mit der bekannten Lage könntest du deine in Fahrzeugkoordinaten gemessenen Werte ins Erdkoordinatensystem umrechnen. Beziehungsweise den g-Vektor herausrechnen... Matthias H. schrieb: > Jetzt hab ich mich natürlich erkundigt und bin auf den Kalman Filter > gestoßen. Ja, kann man damit machen. Aber nur der Kalman allein nützt auch nix. Die Umrechnung der Koordinatensystem ergibt außerdem Nichtlinearitäten => also siehe EKF, UKF, Partikel Filter,...
Matthias H. schrieb: > ich messe meine Beschleunigung und Winkel. Bei meinem > Beschleunigungssensor habe ich immer einen Drift in > X-Richtung(Fahrzeuglängsachse). Der Drift ist immer da aber immer > unbekannt hoch und wenn ich mit dem Fahrzeug am Berg stehe und die > Beschleunigung in X-Richtung 0 (z.B ich stehe) ist soll er mir auch in > X-Richtung 0 ausgeben und nicht noch den Anteil von der > Erdbeschleunigung. Geht ganz einfach: Doppler-Radar am Fahrzeug schräg nach unten zur Messung der Fahrzeuggeschwindigkeit über dem Untergrund. Geschwindigkeit nach der Zeit ableiten und schon hat man die Beschleunigung.
Matthias H. schrieb: > Der Drift ist immer da aber immer unbekannt hoch ... Was meinst du mit "Der Drift ..:"? > ... wenn ich mit dem Fahrzeug am Berg stehe und die Beschleunigung > in X-Richtung 0 (z.B ich stehe) ist soll er mir auch in > X-Richtung 0 ausgeben und nicht noch den Anteil von der > Erdbeschleunigung. Wie denn nun? Wenn du am Berg stehst, ist die X-Achse (vermutlich) nicht horizontal ausgerichtet, sondern bergab bzw. bergauf. Der Beschleunigungssensor kann nicht zwischen dynamischer Beschleunigung und Schwerebeschleunigung unterscheiden. Natürlich taucht dann die Erdbeschleunigung mit dem Sinus der Neigung als X-Wert auf. Bei Verwendung des Erdmagnetfeldes als Bezugssystem, musst du erstmal die örtliche Inklination berücksichtigen. Es gibt als Modell fürs Erdmagnetfeld z.B. das WMM, das aber nichts von lokalen Effekten weiss.
Angehängte Dateien:
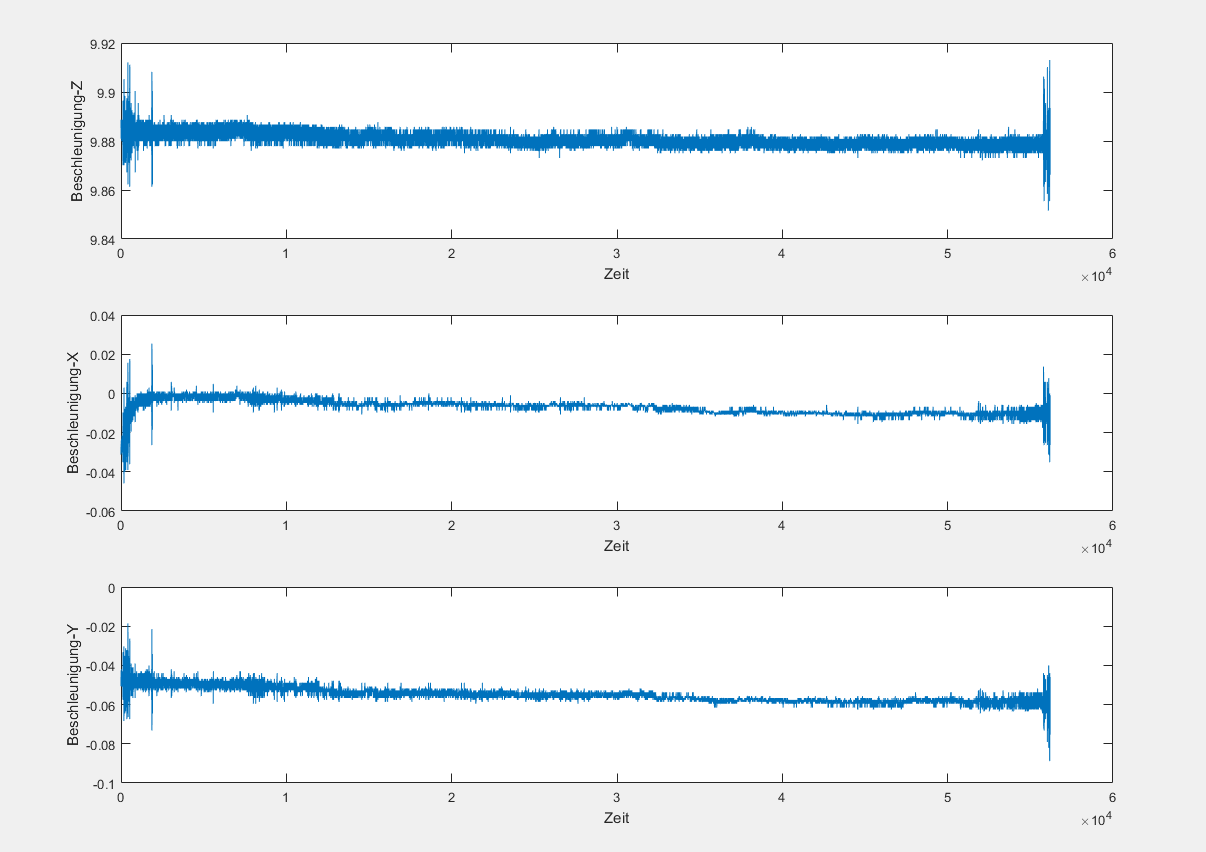
Okay, Also was ich möchte ist, dass sobald ich stehe egal ob am Berg oder nicht, die Beschleunigung in X-Richtung 0 ist. Damit, wenn ich die Beschleunigung integriere, auch meine echte Geschwindigkeit bekomme und meine "echte" Beschleunigung in X-Richtung(Längsrichtung) regeln kann. Ich hab die Rotationsmatritzen aber damit funktioniert es nicht ganz und deswegen dachte ich, ich könnte mit dem Kalman Filter schätzen wann meine Beschleunigung in X-Richtung 0 sein muss. Ich hab meinen "Drift" mal angehängt. Die Zeit ist in Sekunden. Also eigentlich nicht so arg groß.
Matthias H. schrieb: > Also was ich möchte ist, dass sobald ich stehe egal ob am Berg oder > nicht, die Beschleunigung in X-Richtung 0 ist. Du kannst soviel mögen wie du willst, die Beschleunigung wird sich nicht darum scheren. Stehst du am Berg, ist die Beschleunigung in Richtung der Fahrzeuglängsachse nicht 0, ob du willst oder nicht. Daher rollt dein Fahrzeuge ja auch weg, wenn es nicht gebremst wird. MfG Klaus
Angehängte Dateien:
-

Kalmanfilter.PNG
51 KB
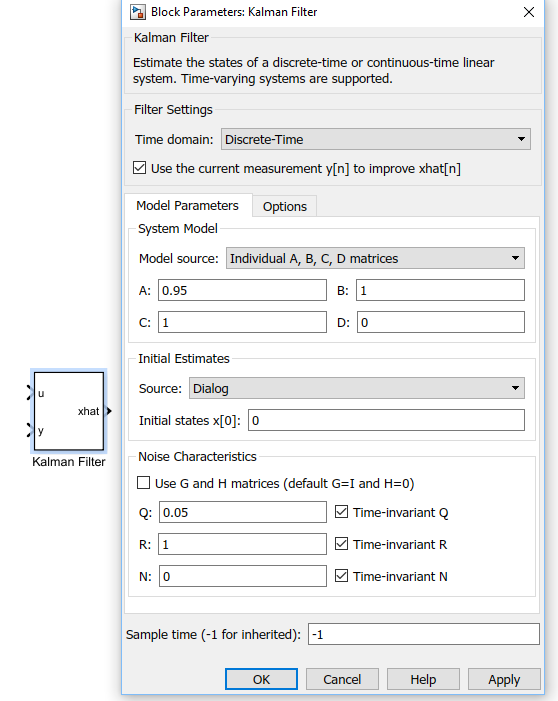
Ok, ok :D. Wenn ich hier grad schon ein Fachpublikum habe, kann ich euch fragen wie ihr die Fahrzeugmasse schätzen würdet? ich hab da mal wieder an den Kalman Filter gedacht. Ich brauche für den Kalman Filter zwei Eingänge u und y, was sind das für Eingänge??... Ich messe meine Beschleunigung und kann meine Kräfte ungefähr bestimmen. Kann ich damit dann schon meine Masse schätzen?
in Simulink hab ich den Block wie im Anhang. Danke ;):-*
Der Drift entsteht eigentlich meist durch numerische Integration, da die Daten des Accelerometers stark verrauscht sind. Kalman Filter wird für Datenfusionierung von Gyroscope und Accelerometer eingesetzt um den Drift von Gyroscope und das Rauschen vom Accelerometer zu schätzen.
Matse H. schrieb: > Also was ich möchte ist, dass sobald ich stehe egal ob am Berg oder > nicht, die Beschleunigung in X-Richtung 0 ist. Nunja, so einfach geht das auch wieder nicht. Wenn du eine konstante Geschwindigkeit (z.B. 50km/h) fährst, ist die Beschleunigung in Fahrzeugrichtung auch gleich 0. Ich vermute, dass Du den Stillstand rel. zum Boden nicht so einfach ohne Messwerte von sich bewegenden Teilen, (Reifen....) messen kannst. Vll. ein Drucksensor nach vorne, der die relative Änderung misst. Solange in Bewegung übt der Fahrtwind Druck aus.
Schreibe mal, was für ein Projekt du betreibst. Ich habe ein Segway Clone gebaut und bin auch auf das Problem gestoßen. Kalman erfordert statistische Parameter über die Daten, die vom Gyro- und Acc-Sensor kommen. Diese haben mit gefehlt. Sehr gut funktioniert auch ein Komplementär-Filter, in welchem neben einer Reduzierung des Rauschens (Tiefpass) auch das die Drift des Gyro (Hochpass) unterdrückt wird. Ich war mit dem Ergebnis zufrieden. W.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.