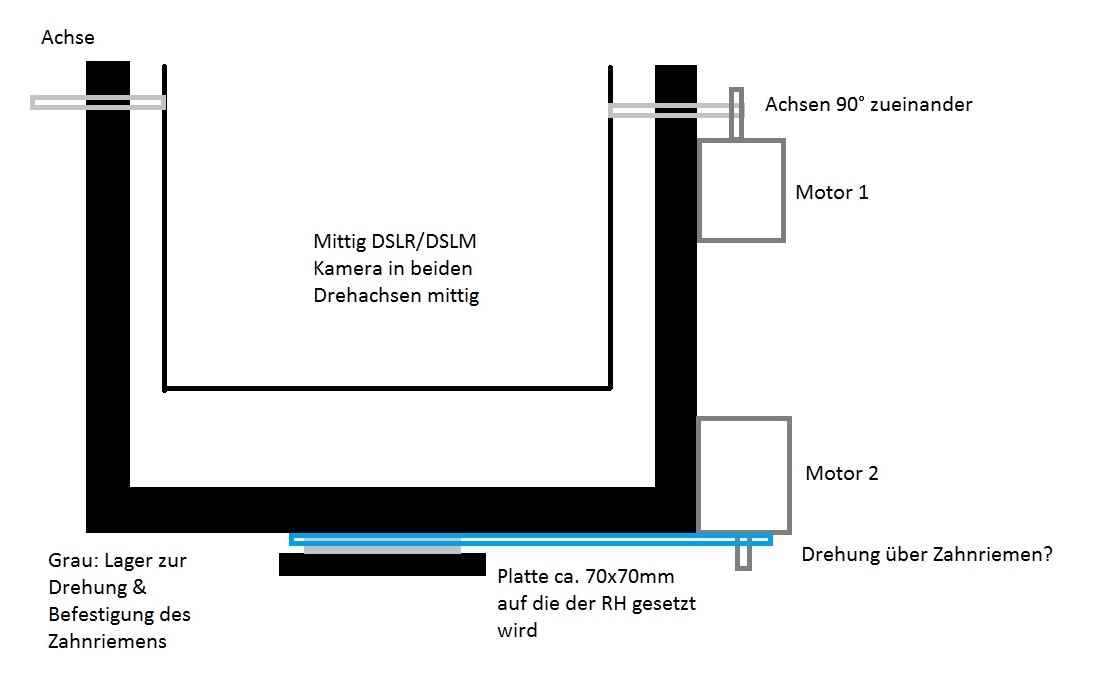
Hallo zusammen, ich plane gerade einem Remotehead (wer nicht weiß was das ist, einfach googlen, findet man sofort). Bei meinem alten Aufbau habe ich die Achsen direkt über Getriebemotoren angetrieben und die Achsen lagen parallel. Ich möchte jetzt für ein anderes Projekt gerne einen kleineren zweiten bauen, der zudem noch über Schrittmotoren gesteuert wird, da ich gerne komplett programmierbare Kamerafahrten realisieren möchte. Da ich dieses Hobby mit dem Selbstbauen noch nicht so lange mache und ich beruflich leider in einer anderen Ecke unterwegs bin, könnte ich etwas geballtes Know-How von euch gebrauchen, was die Auswahl der Teile angeht. Ich habe mal eine Skizze mit angehangen wie ich mir das ganze Vorstelle. Als Motor würde ich am liebsten welche nach Nema 17 oder 23 Bauart nehmen. Als Steuerung werde ich einen Arduino nehmen, da dieses hier in ein bereits bestehendes Projekt eingearbeitet wird und dort bereits ein Arduino eingesetzt ist. Ich weiß nur nicht ganz wie ich die 90° Ecke bei dem oberen Schrittmotor angehen soll bzw ob es überhaupt sinnvoll ist. Gedacht habe ich vlt an ein Schneckengetriebe, da wüsste ich aber auch noch keinen guten Teilelieferant wo man entsprechende Teile herbekommt, fertige habe ich in der Größe leider nicht gefunden. Ein weiteres Problem ist die Lagerung des Ganzen unten auf der Bodenplatte. So wie es aussieht habe ich nur eine Grundfläche von 70x70mm +- nen bisschen auf der ich das ganze Aufsetzen kann. Da müsste das ganze Kugelgelagert werden. Wichtig ist halt dass der ganze Aufbau nicht zur Seite kippen kann. Freue mich über jeden Denkanstoß den ich bekommen kann und auch Hinweise zu Onlineshops oder so wo man passendes Material bestellen könnte. VG
Angehängte Dateien:
-

Skizze.jpg
82 KB
Felix B. schrieb: > ich plane gerade einem Remotehead (wer nicht weiß was das ist, einfach > googlen, findet man sofort). Hmmm. Ein entfernter Kopf vielleicht? http://www.linguee.de/englisch-deutsch/uebersetzung/remote+head.html Sowas tut doch weh.
Das mit dem eigenen Remotehead habe ich schon ca. 7 Jahre hinter mir, lange vor dem Gimbal-Hype ;) Ich habe kleine Getriebmotoren mit Inkrementalencoder (Zebra auf einer Achsscheibe+2 Reflexlichtschranken) verwendet, damit war mit einem PID-Regler direktes Anfahren auch möglich. Schrittmotore habe ich absichtlich nicht genommen, weil ohne dickes Getriebe bei dem offenen Aufbau durchaus Schrittverluste wahrscheinlich sind (Kabel zerrt etwas, Kamera nicht ausgewuchtet, einer stösst dagegen, etc.) und die Positionierungsgeschwindigkeit doch etwas lahmer wird, wenn man auch Genauigkeit haben will. Getriebemotoren sind aber nicht so der Bringer, die letzte Untersetzung der üblichen Hobby-Varianten (10-20EUR) bringt deutliches Spiel. Das kann man aber mit Vorspannung loswerden, wenn der Schwenkbereich eingeschränkt sein kann. Das Problem bei Schneckenrädern ist, dass die Lagerung der Schneckenachse verwindungs- und spielfrei und Schnecke und Schneckenrad von sehr guter Qualität sein müssen, sonst schlackert das auch munter vor sich hin. In der Astronomie wird sowas verwendet, die Räder sind aber a) recht gross und b) sehr teuer, da sind dann selbst die Mädler-Preise für normale Zahn/Schneckenräder quasi geschenkt. "Echte" Remoteheads (zB. von Panther) verwenden zumindest "hintenraus" nur Untersetzungen mit Zahnriemen und haben damit so gut wie kein Spiel. Das wäre dann V2 meines RHs geworden, allerdings war der Leidensdruck bisher nicht so gross. Und dann gibt es inzwischen für 20-30EUR fertige Gimbal-Steuerungen, die auch noch fernsteuerbar sind... Irgendwas von beiden wirds, aber ich weiss noch nicht was ;) Ansonsten: Kugellager gibt es als Miniatur-Flanschversionen auch zum Einpressen für wenig Geld. Ist ingesamt etwas einfacher handhabbar als "normale" Lager, wenn man mechanisch nicht so präzise arbeiten kann.
Georg A. schrieb: > Das mit dem eigenen Remotehead habe ich schon ca. 7 Jahre hinter mir, > lange vor dem Gimbal-Hype ;) Ich habe kleine Getriebmotoren mit > Inkrementalencoder (Zebra auf einer Achsscheibe+2 Reflexlichtschranken) > verwendet, damit war mit einem PID-Regler direktes Anfahren auch > möglich. Gimbal wollte ich später auch noch bauen, wollte mich aber erstmal an dem RH jetzt probieren... > Das Problem bei Schneckenrädern ist, dass die Lagerung der > Schneckenachse verwindungs- und spielfrei und Schnecke und > Schneckenrad von sehr guter Qualität sein müssen, sonst schlackert das > auch munter vor sich hin. In der Astronomie wird sowas verwendet, die > Räder sind aber a) recht gross und b) sehr teuer, da sind dann selbst > die Mädler-Preise für normale Zahn/Schneckenräder quasi geschenkt. > > "Echte" Remoteheads (zB. von Panther) verwenden zumindest "hintenraus" > nur Untersetzungen mit Zahnriemen und haben damit so gut wie kein Spiel. ok, dann überlege ich mir vlt mal besser was mit Zahnriemen... > Ansonsten: Kugellager gibt es als Miniatur-Flanschversionen auch zum > Einpressen für wenig Geld. Ist ingesamt etwas einfacher handhabbar als > "normale" Lager, wenn man mechanisch nicht so präzise arbeiten kann. ok, danach such ich mal
Felix B. schrieb: > Ich möchte jetzt für ein anderes Projekt gerne einen kleineren zweiten > bauen, der zudem noch über Schrittmotoren gesteuert wird, da ich gerne > komplett programmierbare Kamerafahrten realisieren möchte Echt, willst du von einer Position zur anderen ruckeln ? Man nimmt wohl lieber BLDC mit Vektorregelung. Georg A. schrieb: > Das Problem bei Schneckenrädern ist, dass die Lagerung der > Schneckenachse verwindungs- und spielfrei und Schnecke und > Schneckenrad von sehr guter Qualität sein müssen, sonst schlackert das > auch munter vor sich hin. Ja. Felix B. schrieb: > Ich weiß nur nicht ganz wie ich die 90° Ecke bei dem oberen Schrittmotor > angehen soll bzw ob es überhaupt sinnvoll ist. Es gibt flache Motoren. Man vermeidet möglichst jedes Getriebe, denn man hat immer Ärger mit Getriebespiel. Ein Zahnriemen geht noch, man kann Riemen sogar umlenken, aber man kann sich den Aufwand auch sparen. Klare Sache: Deine Schrittmotoren sind eine schlechte Idee. Selbst im Mikroschritt ist deren Bewegung nicht gleichmässig. Daher verwenden Gimbals eher BLDC. Einfacher ist ein normaler DC Gleichstrommotor, dem man einen hochauflösenden Incrementalencoder auf die Achse steckt.
:
Bearbeitet durch User
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.