{kind=link}
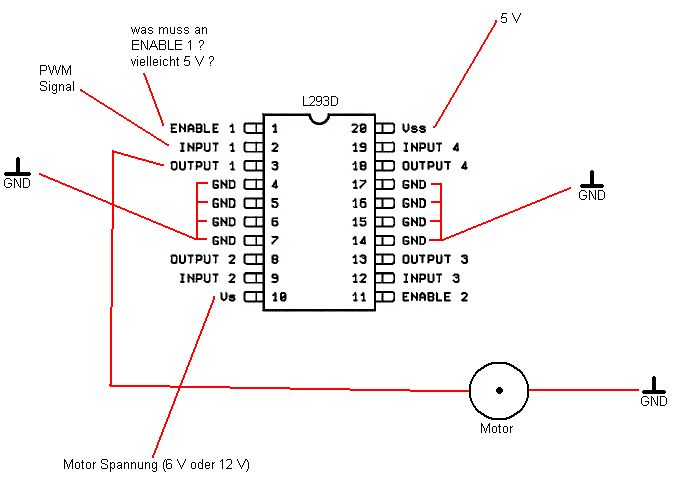
hallo, muss ich den motorentreiber so anschließen? und noch was: was muss an ENABLE 1, wenn der motor laufen soll? 5 v? und ist sonst alles richtig? Bild ist als anhang. mfg raoul4
Angehängte Dateien:
-

bild.gif
13 KB
:
Verschoben durch Admin
Hi, Scheint richtig zu sein. Enable beudeutet einschalten. Ich denk mal wenn du da 5V drauf gibts wird es laufen. Warum probierst du es nicht einfach aus? mfg
Du hast etwas falsch beschaltet. Mit den Input Eingängen wird die Drehrichtung gesteuert, mit Enable werden die FETs freigegeben. PWM muß also an Enable, Input1 auf High und Input2 auf Low. Du darfst NIEMALS Input1 und Input2 auf High setzen, wenn Enable High ist. Dann bekommst Du einen fetten Kurzschluß und das wars mit dem L293. Für Input3 und Input4 und Enable2 gilt natürlich dasselbe. mfg, Stefan.
HÄ? FET im L293D? Kurzschluß? Bei den von Stefan angegebenen Betriebsbedingungen gibts keinen Kurzschluß, der den Baustein zerstört.
Sorry, ich habe mich etwas verguckt. Ich habe gedacht, er betreibt das als Vollbrücke und habe dann etwas vorschnell geantwortet. Also so wie das Bild aussieht, funktioniert es. :-) Und ja, es sind auch keine FETs. mfg, Stefan.
Als ich eine L293D verwenden wollte, halfen mir diesen Seiten hier weiter: http://www.elektronik-projekt.de/dominik/hbrid04.htm http://www.me.umn.edu/courses/me2011/robot/technotes/L293/L293.html http://www.kmitl.ac.th/~kswichit/c52robot/c52robot.htm Gruß, Zoltan
Hallo, ich hätte noch ein paar Fragen zum L293D. Ausgangsschaltung Motor an 1Y und 2Y (nennt man das Vollbrücke?) PWM Signal an 1,2EN 1A und 2A an Controller zur Richtungssteuerung Ist folgendes Richtig 1A 2A 1 0 Motor dreht in die eine Richtung 0 1 Motor dreht in die andere Richtung Geschwindigkeit abhängig von PWM. Was passiert, wenn ich das PWM Signal auf 0 setze. Wird der Motor kurzgeschlossen (Vollbremsung) oder läuft der Motor einfach aus? Was passiert, wenn ich an 1A und 2A das gleiche Signal gebe während ein PWM Signal anliegt? Danke im Vorraus Gruß Jörg
Input1 legsch dies PWM signal Input2 legsch des invertirte PWM Signal so wenn jetzt a Tastverhältnis von 50/50 (des heisst Pulsbreit vo LOW = HIGH) denn stoht da Motor und des guat isch das da Motor denn noch zusätzlich blockiert. und links rechts machsch jetzt eba mit varriera vo da Pulsbreite vom PWM. Und ENABLE legsch vom MC uf High wenn dia ganze gschicht renna söll, und wenns immer renna söll kannsch as gleich uf 5V lega
2,5 Jahre alter Thread... Und dann auch noch Quatsch geschrieben... Zur Drehzahlregelung/-steuerung muß man die PWM an den Enable-Eingang legen. Die INPUTs geben die Drehrichtung vor. Liegt an beiden Eingängen der Voll-Brücke das gleiche Signal, wird der Motor kurzgeschlossen und somit gebremst. Wenn man da die PWM anlegt, wird er zyklisch gedreht und gebremst... nicht sehr effizient. Will man eine Drehmomentregelung realisieren, schaltet man die Chopperfrequenz auf den Enable-Eingang und die Drehzahl-PWM auf einen der INPUTs; der andere INPUT liegt in diesem Fall auf L-Pegel...
Hi, für beide Drehrichtungen muß der Motor zwischen zwei Halbbrücken gelegt werden. Im obigen Bild liegt er einseitig auf GND. Damit ist nur eine Drehrichtung möglich, und eine Kurzschlußbremsung des Motors. p.s. ...wie unterstreicht man hier was? ts
>p.s. ...wie unterstreicht man hier was?
Lineal auf den Bildschirm legen und mit einem dicken Edding einen
Strich unter das zu unterstreichende Wort machen...
Sonst geht das mit einem Unterstrich vor und hinter dem zu
unterstreichenden Wort.
>Im obigen Bild liegt er einseitig auf GND. Damit ist nur eine
Drehrichtung möglich, und eine Kurzschlußbremsung des Motors.
der soll wohl bloß in eine Richtung unterschiedliche Drehzahlen
maschen...
Hallo, ich will bei meinem motor nur die drehrichtung ändern, die drehzahl ist mir egal.soll ich dann auf enable einfach ein high-signal legen? die richtung mach ich ja dann mit den inputs mfg johnny
Hi, im Anhang ist das Datasheet zu l293. Da ist auch eine beschaltung für beide Drehrichtungen mit angegeben. Mal eine Frage zu dem PWM signal auf Enable. Geht die Beschaltung auf für beide Richtungen? Ich habe das signal nach dem Datasheet gemacht. Leiderns stürzt mir dann der uC nach einer gewissen Drehzahl ab. Also von null aufwärts bleibt er dann sehr bald hängen. Muss ich noch ein Entstörglied (snubber) einbauen? Die belegung ist 1A Richtung, 2A PWM, und enable = HIGH 1Y und 2Y gehen zum Motor. das PWM Signal läuft mit einer Frequenz von rund 13 Hz, ist es besser eine Frequenz von 16 KHz zu wählen? Vielen Dank daniel
>Mal eine Frage zu dem PWM signal auf Enable. Geht die Beschaltung auf >für beide Richtungen? Ja. >das PWM Signal läuft mit einer Frequenz von rund 13 Hz, ist es besser >eine Frequenz von 16 KHz zu wählen? Ja.
Hi, Sind das auch die Gründe warum der uC aussetzt? Oder liegt es am Schaltkreis. Ich habe beide Schaltkreise uC und l293d an der Versorgungsspannung. Habe auch mal den l293d weggelassen, aber der uC bleibt immer noch hängen. Es funktioniert sehr gut mit dem PWM Signal wenn die Stufe noch sehr niedrig ist also zwei drei Schritte über 0 (kein PWM). Und sobald man den das Tastverhältnis erhöht, bleibt der uC stehen und er reagiert auf nicht mehr nur noch RESET. Nach einem Reset funktioniert er wieder, jedoch tritt dann der Fehler wieder auf Woran könnte es liegen ? daniel
>Woran könnte es liegen ?
An deinem nicht geposteten Quellcode! Da muß ein mächtiger Fehler drin
sein.
> Woran könnte es liegen ?
Softwarefehler - oft
Kein EMV-gerechtes Design - meistens
Hi, ich denke nicht das es an der Software liegt. Es ist ein technischer Fehler. Bestimmt muss der Motor entsört werden und der l293d brauch vielleicht auch noch 200nF. http://www.mikrocontroller.net/forum/read-1-116577.html Ich habe diesen Thread gefunden aber ich weiss nicht was er meint mit, den uC "weich" aufhängen. Bzw. wie der R und das C geschaltet wird vor der Versorgungsspannung. R in Reihe und C gegen Masse? Ausserdem wie in er in diesem Thread den Motor entstört hat. Ich habe oben den Source Code, aber ich denke nicht das der Fehler da liegt. Denn es funktioniert ja alles, und es sind nur immer wieder die selben Routinen die verwendet werden. Wenn es einmal funktioniert bei niedrigen PWM-Tastverh. funkioniert es auch bei einem hohen PWM- Tastverh. Naja aber ich lass mich auch gerne belehren, bin ja nur ein Newbie. Vielen Dank für die hinweise daniel
Hi, der uC ist defekt. Ausserdem lässt er sich nicht mehr pogrammieren. Da wahrscheinlich der SCK- Eingang defekt ist. Vielleicht kamen sogar vom L293D Störspitzen die mir den Controller defekt gemacht haben. Man sollte doch immer 1k zwischen den Controller Pins und den l293 Pins machen. Schade :( daniel
Hallo, am Eingang meine L293D liegt schon bereit eine Spannung von ca. 2,5 V an, kann sein. kann sein dass ich es zerschossen habe......... Vielen Dank im Vorraus Teva
Einen älteren Thread hättest Du nicht ausgraben können. Oder? Warum machst Du nicht einen neuen auf?
Ich hatte das gleiche Problem. Bei mir war die Ursache EMV, die vom Motor verursacht wurde und den uC komische Sachen machen ließ, obwohl alles in korrekt war. Die Lösung war, einen Kondensator mit 1nF (und am besten 1000V) direkt zwischen die Motorkontakte zu löten. Danach lief alles ohne Probleme. raupenfreak jaja, die Leichenschändung. Wenn aber jemand das gleiche Problem hat, auf diesen Thread stößt und dann die Lösung hat, war es die Leichenschändung wert ;-)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.