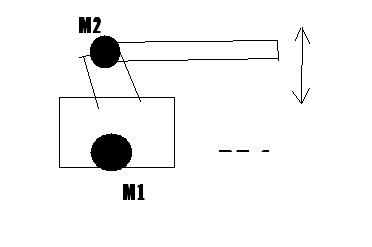
Guten Abend Die Problemstellung meines Auftrags. Ich habe einen Geschützturm. Dieser wird in der vertikalen Lage mittels eines Motors (Bild M1) von oben nach unten bewegt, um ein schütteln zu imitieren. Ein zweiter Motor (Bild M2) muss den Lauf immer auf das Ziel halten. Meine Aufgabe ist es nun die auslenkung (Bild Pfeil) zu messen. ich werde erst morgen erfahren wie gross sie auf 2 Meter sein kann. Ich gehe davon aus das sie au 2m nicht grösser als plusminus 2cm sein wird. Meine Idee: einen Laserpointer am Lauf befestigen und in zwei Meter entfernung auf einen Print zielen lassen. Auf dem Print sind in vertikaler Lage SMD Fotodioden aneinander gereit. Der Lauf wird auf die mittlere Diode ausgerichtet und M1 fängt an seine Bewegungen zu machen. Der Lauf bewegt sich geringfügig und "aktiviert" die entsprechende Diode bei auslenkung des Laufes. Die ausswertung erfolgt über einen PIC mit Display. Könnt ihr mir vileich etwas anderes vorschlagen? Ich habe den Auftrag bekommen ein
Da es hier keine Bilder gibt, rate ich mal: Motor M1 schüttelt das Objekt (Turm) und Motor2 soll diese schüttelbewegung ausgleichen und die Objektrichtung konstant auf einen vorgegebenen Wert halten?? Sehe ich das so richtig??
Dann würde ich das Regelkreis auffassen: Mittels eines Winkelssensors wird der aktuelle Winkel des Rohres gegen die Horizontale ermittelt. Diese wird mittels eines Reglers auf einen Sollwert verglichen und mit dem Motor M2 nachgeführt.. Der Motor M1 simuliert Störungen... Sowas nennt sich Lageregelung... Ich würde den Ansatz wohl so nehmen...
Ein Kreisel würde hier möglicherweise helfen. Das Servo das den Lauf bewegt muss dann mit dem Kreisel entsprechend gekoppelt werden.
Leider lässt sich mit einem Kreisel eine lineare Bewegung nicht erfassen und auswerten. Wenn Beschleunigungssensoren nicht einsetzbar sind, ist Target tracking imho die einzige verbleibende Möglichkeit. Arno
Kein Wunder, daß bei Manövern immer wieder Beobachter ums Leben kommen. Marks Regelung braucht ja auch garnicht so richtig zu funktionieren, weil Deutschlands Freiheit ja am Hindukusch nicht mit Panzerkanonen verteidigt wird. Vielleicht auch besser so, wenn man die Frage liest. Feuer frei! Detlef
die Regelung für die Bordkanone vom Leopard hat mein ehemaliger Prof entwickelt. Jedes Semester musste sich immer wieder den gleichen Salomon anhören... (obwohl - hab's mal live gesehen - echt beeindruckend) .
Ich würde es mit zwei gyroskopen machen, die gyroskope haben durch den drehimpuls raumfeste achsen. wenn der winkel bloß interressant ist brauchst du bloß ein gyroskop, im rohr. Wird das ziel anvisiert werden die raumfesten achsen bzgl des rohres gespeichert, stellt sich eine verschiebung des unteren bereiches ein so verändert sich im "ersten moment" auch das rohr, nun kompensiert man dieses. das klappt für alle drei achsen. natürlich muss man die relative position des zieles zu dem eigenen (z.b. durch wärmestrahlungssensoren oder optische erfassung) messen. rohr abgleichen, gyroskopdaten abspeichern, kompensieren, ziel erfassen, rohr abgleichen,..... feddich,.. an deiner stelle würde ich eine simulation schreiben, die raumfesten achsen des gyroskop und die achsen des koordinatensystem (kartesisch) können dabei ein und dasselbe sein, dann erzeugst du durch random eine beschleunigung nach oben oder unten, das ziel anzuvisieren würde ich in der simu durch einfache vektoraddition verwirklichen, dann "gyroskopdaten" abspeichern, bewegungen kompensieren,.. das wär mein ansatz,.. aber naja grüüße
Du sollst doch die Motoren garnicht steuern, sondern nur die "Güte" dieser Steuerung messen, oder???
@ Kai Scheddin: wenn das System sich längs einer noch so raumfesten Achse verschiebt kann das mit einem Kreisel oder Gyro nicht ausgewertet werden. Hier bewegt sich der Turm gemäß "Zeichnung" nur senkrecht auf und ab, ein Kreisel ist also sinnlos. Arno
hm ja,.. stimmt,.. aber bei kippbewegungen siehts anders aus,.. also funktionierts mit gyro nur für zwei achsen,... wenn es kippt,.. k,.. grüüße
Man kann auch einen Stellkondensator zwischen Lauf und Karosse bringen und anhand seiner Kapazität (Federeffekt - Ausdehnung - Hub/Senke des Laufes), den Motor steuern. Zugegeben, das würde an nem Leo ziemlich doof aussehen aber um's Aussehen geht es ja bekanntermaßen nicht wirklich. Allerdings wundert es mich schon dass sich die Military-Fraktion hier Rat holt...
Dadurch kennt man nur den momentan winkel zwischen Rohr und karosse, welche sich ohne weitere anseuterung ja nicht verändert. Wichtig ist halt immer noch die zielerfassung, und zwar die relative position des ziel's zum fahrzeug,.. wenn man wirklich nur delta h, also die veränderung der höhe, wie oben genannt betrachten will ist es schwierig, den ein Gelände ist tückisch und hat binnen einem meter auch mal 30cm höhendifferenz, also ist die einzige position an welcher die koordinaten abgelesen werden sollten, das zentrum des turms. GPS ist zu langsam und ungenau,.. eine alternative sind beschleunigungssensoren (wurde oben schon genannt), die geben ziemlich gut beschleunigung, (momentan)geschwindigkeit, und strecke des rütelns wieder, schnell sind die dinger auch. beschleunigung messen, zurückgelegte strecke ausrechnen, die balistik auf die alte relative position des ziels berechnen, neue position des ziels mit der zielerfassung bestimmen,... >Allerdings wundert es mich schon dass sich die Military-Fraktion hier >Rat holt... hier werden ja fräsen und sonstiges gedönst gebastelt, wo von klassischer mechanik über mathematik, software und hardware alles in einen Topf fliesst. Mich würde es auch nicht wundern wenn es in wirklichkeit um ein Echtzeit Strategiespiel ginge, wobei das oben genannte problem aus einer sicht gelöst werden will die hier im Forum anzutreffen ist. Wie schon gesagt, von Detektoren bis zu Michelson Interferometrie ist hier (fast) alles zu finden. grüüüüße (langer text g )
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.