Hy ich versuche grad eine Strecke mit Matlab zum simulieren, um einen PID Regler zu entwerfen... leider schwank die Totzeit und ab einer gewissen Zeit wird die gesamte Übertragungsfunktion dann instabil! kann man dann überhaupt ein Regler nutzen? also die eigentliche Strecke besteht aus einer Totzeit + PT2. Der Ausgang wird über eine Totzeit2 (gleiche dauer wie =Totzeit + PT2) mit dem Eingangssignal verglichen das reinging und soll gegen 0 geregelt werden... leider wird das ganze instabil und ich kann auch nicht instabile Pole/NS kürzen, da die Totzeiten varieren. Kann mir jemand helfen?
Totzeiten macht man mit einem langsamen Integrator weg. Er darf waehrend der Totzeit nicht allzu stark weglaufen.
Wieso willst du einen PID Regler entwerfen? Dieser ist idealisiert und bringt dir in Wirklichkeit gar nichts... Die Stellgrößenbeschränkung solltest du miteinbringen. Die Totzeit sieht man ja nur im Phasengang. Die Kunst liegt dahinter, durch den differentiellen Anteil, den Ausbruch, der durch die Totzeit verursacht wird, sprich das das ganze Richtung -180° bei k=1 geht, zu verzögern... Dieser Kunstgriff nützt dir NICHTS wenn die Totzeit variiert! In dieser Hinsicht ist der D-Anteil zu, naja, gefährlich... ICh würds mit ganz normalem PI-Regler versuchen, und dafür eine längere Anregelzeit in Kauf nehmen... Kommt natürlich auf die Anwendung drauf an! lg jÜrgen
ok vielen Dank. Mit dem PID habe ich nach Tests erfahren müssen, dass es schwierig bis unmöglich ist. Daher bleibt nur ein PI über und das wär auch ausreichend. Nur was kann ich gegen die instabilität der Strecke tun? Mein Totzeitbereich liegt zwischen 30 und 80 Sekunden. bis 40 sek ist alles Stabil. wenn ich drüber gehe wird F(s) instabil und die NS wandern mit. Daher kann ich auch direkt mit nem Regler keine NS kürzen... würde gern das Simulonk bild posten aber kann es ohne ML daheim leider nicht öffnen... Die Strecke an sich ist auch nicht das Problem. Nur da ich ja dem Wert am Eingang und den Wert mit Totzeit am Ausgang vergleichen muss, verursacht mir die Verzögerung parallel zur Strecke, die zur Differenzbildung dient, die instabilität. Habe sie so gewählt, das die Strecke eingeschwungen ist ist so eingentlich keine Probleme enstehen sollten aber laut Berechnung ist sie dann instabil und schwingt auch im Scope(auch mit nur einem PI)... Eine Sukzessive Approx. müsste auf jeden Fall möglich sein aber ist zu langsam...
Ein PID ist ein Tool, das fast immer passt, aber nicht immer. Eine Idee : Einen Beobachter(Simulation) fuer das fehlende Signal nach dem Tiefpass, aber vor der Totzeit. Oder ist zuerst die Totzeit und dann der Tiefpass. Auch gut. Das Signal in der Mitte simulieren und einspeisen.
Angehängte Dateien:
-

Strecke.jpg
220 KB
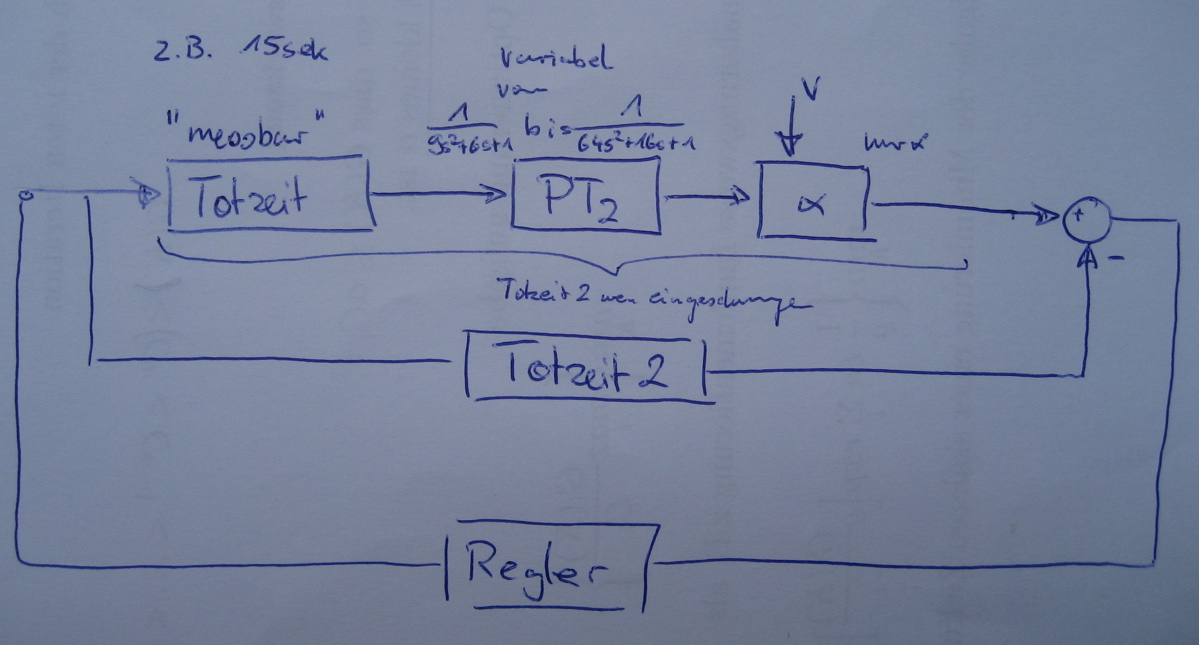
habs mal schnell aufgezeichnet. Totzeit2 hab ich über testen so angepasst, das Totzeit+PT2 allein eingeschwungen (Sprungantwort) sind.
Siehe in dem eBook "Grundlagen digitale regelung mit SCICOS/SCILAB" auf www.ebookaktiv.de
@ebookaktiv Ach Herr Auer, man könnte fast meinen Sie schreien nach einer Abmahnung!
ok vielen Dank. Habe glaube ich leider einen grundsätzlichen Fehler?! Brauch ich überhaupt die zweite Totzeit? Ich kann doch auch einfach immer die aktuellen Werte verlgeichen oder geht das mit einem PID Regler nicht? also das ich Eingang und Ausgang immer vergleiche, obwohl die Reaktionszeit von Eingang zum Ausgang die Totzeit hat. also die gleiche Strecke, nur das Totzeit2 einfach nur 1 ist und ein Durchgriff bildet...
Also meines Erachtens nach kannst du die Totzeit nicht einfach vernachlässigen: Der Regler soll ja auf die aktuellen Ereignisse reagieren. Wenn du eine Totzeit drin hast, lässt die Wirkung des Reglers aber u.U. zu lange auf sich warten. Das bedeutet, dass die Wirkung des Reglers, wenn sie eintritt, sozusagen nicht mehr zeitgemäß ist. Es kommt nun auf deine Strecke und ihre Dynamik an, ob das zu fatalen Reaktionen der Strecke (Instabilität) führt, oder nicht. Bei solchen extremen Totzeiten brauchst du schon eine verdammt gutmütige Strecke... ;-) Vielleicht kannst du dein System dahingehend ändern, dass du die Totzeiten verkürzt? Gruß Konrad
Ein PID regler ist die duemmste Loesung. Wenn's geht ist gut, falls nicht, muss man einem Regler mehr Wissen ueber die Strecke beibringen. Man kann auch nichtvorhandene Messwerte einfliessen Lassen. dies indem man eine Simulation dieser Werte einbaut.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.