Ich habe Schwierigkeiten mit dem Lösen folgender Aufgaben: Das Rauschen eines CCD-Chips ist recht hoch , so dass die Standardabweichung der Grauwerte σ=10 ist. Es sollen 10 Bilder gemittelt werden. Welchen Wert kann man für die Standardabweichung des gemittelten Bildes erwarten? Da ich keine vertikalen Streifen haben will, soll das Bild gedreht und verschoben werden. Dadurch wird der Punkt P1(30, 40) in den Punkt Q1(145.98, 119.64) und der Punkt P2(60, 80) in den Punkt Q2(191.96, 139.28) transformiert. Wie lässt sich der Rotationswinkel sowie die Verschiebung berechnen? Für jede Hilfe schonmal vielen Dank!
1) Stichwort: Wurzel - n - Gesetz? 2) Wie wär's mit Skalarprodukt zwischen den P1P2 und Q1Q2? Oder Q1 auf P1 schieben ... Kannst du erst mal grafisch lösen, dann kennst du die Lösung schon ungefähr.
Danke Netbird für die Hilfe. Mit der Aufgabe 2 hab ich noch so meine Schwierigkeiten. Kannst du mir da noch weiter helfen`?
Rotation + Verschiebung. Die Zusammenfassung beider Operationen führt zu folgenden Gleichungen Q1x = P1x * cos(a) + P1y * sin(a) + dx Q1y = -P1y * sin(a) + P1y * cos(a) + dy und das Ganze dann natürlich noch für P2/Q2 Damit hast du 4 Gleichungen in 4 Unbekannten: sin(a), cos(a), dx, dy und kannst das erst mal lösen. Wenn du dann cos(a) und sin(a) kennst, kannst du auch a ausrechnen.
>Wenn du dann cos(a) und sin(a) kennst, kannst du auch a ausrechnen.
Drehwinkel: Vektor P1P2 = (30 40), Vektor Q1Q2 = (46 20) (gerundet!,
selbst genau nachrechnen..)
Dann P1P2 * Q1Q2 = |P1P2|.|Q1Q2|.cos phi, * steht für Skalarprodukt.
Hieraus Phi um 29 Grad rechts herum ...
Verschiebungsvektor ergibt sich nach dem Drehen als Vektor von P1 zu Q1,
müsste um (116 80)sein, Angaben wie beim Lotto, weil Freitag abend ist
:-)
Falls die gesamte Transformation gefragt ist: Siehe Karl Heinz
Angehängte Dateien:
-

Matrix.JPG
43 KB
Diese Schreibweise kenne ich nicht so: Q1x = P1x * cos(a) + P1y * sin(a) + dx Q1y = -P1y * sin(a) + P1y * cos(a) + dy In der Lösung steht α=30°, b1=b2=100.
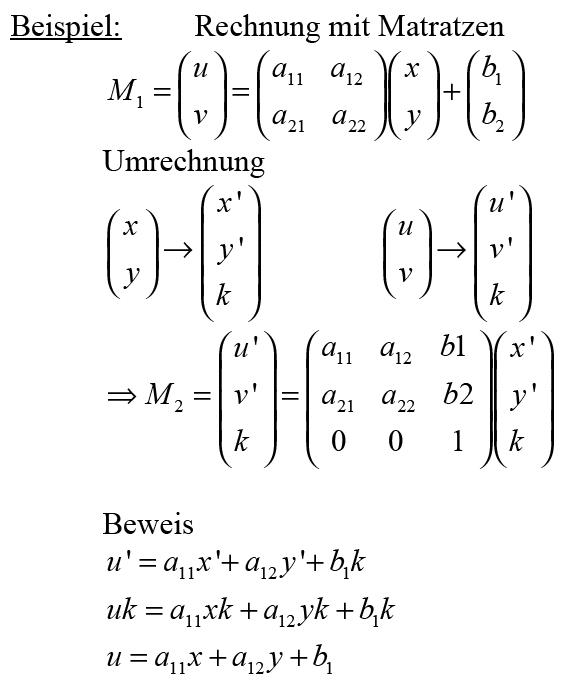
bunny wrote: > Diese Schreibweise kenne ich nicht so: > > Q1x = P1x * cos(a) + P1y * sin(a) + dx > Q1y = -P1y * sin(a) + P1y * cos(a) + dy Sie ist aber völlig gleichwertig und ich wusste ja nicht ob du mit Matrizen etwas anfangen kann. Die obigen Gleichungen sind einfach nur die Matrixmultiplikationen ausgeschrieben. Dein k ist dabei 1.0 Rotationsmatrix: R = ca sa 0 wobei ca = cos(a) -sa ca 0 sa = sin(a) 0 0 1 Transformationsmatrix: T = 1 0 dx 0 1 dy 0 0 1 die komplette Matrix die einen Punkt (um den Ursprung) rotiert und verschiebt, lautet daher M = ca sa dx -sa ca dy 0 0 1 Und dein Punkt P transformiert sich zu Q durch die Multiplikation von M mit P Q = M * P eingesetzt ergibt das | Qx Qy 1 | = | ca sa dx | * | Px | | -sa ca dy | | Py | | 0 0 1 | | 1 | Anstatt das als Vektor Matrix-Gleichung zu schreiben, kann die Matrixmultiplikation auch in mehrere Gleichungen extrahiert werden: (jede Zeile der Matrix mit dem Spaltenvektor multiplizieren und die einzelnen Summanden aufaddieren) Qx = ca * Px + sa * Py + dx * 1 Qy = -sa * Px + ca * Py + dy * 1 1 = 0 * Px + 0 * Py + 1 * 1 Und damit hast du aber die beiden Gleichungen die ich vorher angegeben habe.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.