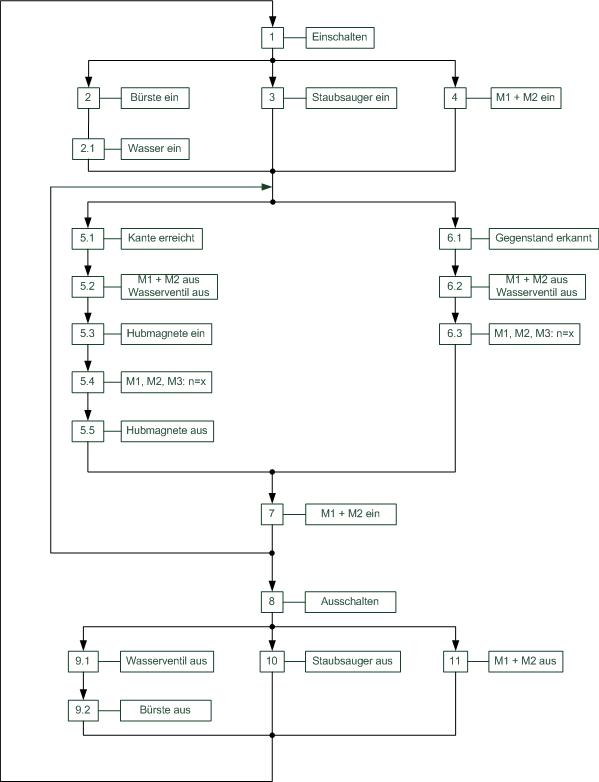
Hallo Im Rahmen einer Abschlussarbeit in der Schule bauen wir einen Roboter, der selbsständig einen Tisch reinigen soll. Das Ganze wird mit einem ATMEGA8L (myAVR) gesteuert. Der Roboter erkennt den Tischrand und Gegenstände automatisch und weicht ihnen aus. Leider stehen wir bei der Programmierung an, da wir noch nie einen Microcontroller programmiert haben und uns die Lehrer auch nicht weiterhelfen können. Ich wollte fragen, ob hier eventuell einer Lust und Zeit hätte uns Teile des Programms zu schreiben. Wir sind für jede Hilfe dankbar. Für nähere Infos bitte melden unter: moritz.spiess@gmx.net Im Anhang befindet sich der ungefähre Ablauf des Programms. Mit freundliche Grüssen Moritz
Hilfe von extern ist erlaubt! Es soll sich ja auch um ein Projekt handeln, wie man es bei der Arbeit antreffen kann. Dort kann man auch nicht alles alleine machen.
Ich kenn da ein Stichwort: Einarbeitung -->So schwer ists nicht Mfg und3rt4ker
Morris89 wrote:
> Im Anhang befindet sich der ungefähre Ablauf des Programms.
Hast du ihn an den Bildschirm getackert? :)
>ns die Lehrer auch nicht weiterhelfen können.
Was istn das für ne Schule????
In so einem Projekt, wie man es bei der Arbeit antreffen kann wird der Programmierer das Pflichtenheft durchlesen und seinen Preis nennen, Könnt Ihr Den auch bezahlen? Soll ja schliesslich ein realistisches Projekt werden! Ich glaub kaum das Jemand seine Zeit dafür umsonst opfern wird einigen Faulis ein Projekt zu programmieren. bye Frank
>Im Rahmen einer Abschlussarbeit in der Schule bauen wir einen Roboter, >der selbsständig einen Tisch reinigen soll. Warum nicht. >Leider stehen wir bei der Programmierung an, da wir noch nie einen >Microcontroller programmiert haben und uns die Lehrer auch nicht >weiterhelfen können. Jetzt wirds vollkommen unglaubwürdig.
Angehängte Dateien:
-

Grafecet.jpg
44 KB
jack wrote: >>Im Rahmen einer Abschlussarbeit in der Schule bauen wir einen Roboter, >>der selbsständig einen Tisch reinigen soll. > > Warum nicht. > >>Leider stehen wir bei der Programmierung an, da wir noch nie einen >>Microcontroller programmiert haben und uns die Lehrer auch nicht >>weiterhelfen können. > > Jetzt wirds vollkommen unglaubwürdig. ist leider so. ich erlenne den beruf automatiker und die haben normalerweise nicht viel mit mikrocontrollen am hut. desshalb haben auch die lehrer keinen plan. kann man sich das ganze in 2 wochen aneignen?
>Jetzt wirds vollkommen unglaubwürdig.
Genau, weil Lehrer ja auch immer soviel wissen, müssten die ja helfen
können...
>Dateianhang: Grafecet.jpg Da seit ihr ja schon fast fertig. Diese Schrittkette braucht doch nur noch eingetippt zu werden: Beitrag "Re: Programm bzw. Ablaeufe steuern"
Naja, man könnte ja mal wenigstens kurz die Anleitung lesen. Soweit ich das gesehen habe, hat das Teil UML Unterstützung und man kann so nen Plan direkt eingeben....
Hallo, nur mal so als Anmerkung: ein üblicher µC kann nur eine Sache zur gleichen Zeit erledigen. Ein Ablauf, der sich z.B. nach "Einschalten" in 3 parallele Zweige teilt, kann nicht programmiert werden. Er kann den Kram nur nacheiander erledigen und an einer Bedingung verzweigen. "Kante erreicht" wäre solch eine Bedingung. Da kann nur "ja" (also drauf reagieren) und "nein" (also weitermachen, womit???) folgen. Gruß aus Berlin Michael
Michael U. wrote: > Hallo, > > nur mal so als Anmerkung: > ein üblicher µC kann nur eine Sache zur gleichen Zeit erledigen. > Naja vielleicht verwenden sie einen Dual-Core-DSP... BF561 z.B. > Ein Ablauf, der sich z.B. nach "Einschalten" in 3 parallele Zweige > teilt, kann nicht programmiert werden. Mit Betriebssystem würd ich das Diagramm durchgehen lassen, obwohl es in diesem Fall auch nicht parallel abgearbeitet werden würde... Was ist ein Automatiker? So etwas wie Automatisierungstechniker?
Michael U. wrote: > nur mal so als Anmerkung: > ein üblicher µC kann nur eine Sache zur gleichen Zeit erledigen. > > Ein Ablauf, der sich z.B. nach "Einschalten" in 3 parallele Zweige > teilt, kann nicht programmiert werden. Das ist überhaupt kein Problem. Man kann ja mehrere FSM's nacheinander durchlaufen. Wenn ein Gesamt-Durchgang durch alle FSM's im Millisekunden-Bereich ist, erscheint das immer noch als "gleichzeitig" aus Sicht des Roboters. Es muss nur definiert werden, innerhalb welcher Zeit welche Aktionen durchgeführt werden müssen. -> Realtime-Anforderung. Auch ein normaler PC mit 1-Kern Prozessor tut nichts "gleichzeitig", das erscheint nur so, weil es schnell genug nacheinander gemacht wird.
Ich nehme an Michael ist es nur darum gegangen, dass das Diagramm falsche Eindrücke vermittelt, die zu flaschen Schlussfolgerungen führen können. Auch wenn die Abarbeitung der einzelnen Funktionen im Millisekunden-Bereich erfolgt, werden Funktionen sequentiell ausgeführt. Dies sollte natürlich auch im Diagramm ersichtlich sein, ansonsten hätte ein Diagramm absolut keine Aussagekraft.
Kann es sein, dass das ganze "leicht" aufwaendig ist? Sollt Ihr den kompletten Roboter mit Peripherie und allem drum und dran bauen?! Schau Dir mal den c't-Bot an (www.segor.de). Ausserdem: Wenn man das Ablaufdiagramm als nichtdeterministischen Automaten betrachtet, kann man diesen auch in einen Deterministischen umwandeln => Der Automat hat dann keine multiplen Instanzen mehr und befindet sich immer nur in einem Zustand. Davon abgesehen, das muss man nur richtig programmieren, auch Interrupts und Timer usw. nutzen dann ist das alles kein Problem. Gewusst wie.
Condi wrote: > Naja, man könnte ja mal wenigstens kurz die Anleitung lesen. Soweit ich > das gesehen habe, hat das Teil UML Unterstützung und man kann so nen > Plan direkt eingeben.... kann mir jemand vielleicht ein gutes freeware uml programm empfehlen?
Hy Mortiz, schau Dir mal ArgoUML an. Der "Hit" isses nicht aber es ist eigentlich recht brauchbar. Kannst Dich ja mal melden wenn Du willst: ICQ 307682079. Kann Dir ja ein paar Anregungen geben. lg, Michael
Hallo Moritz. Was habt ihr denn für Peripherie dran? Sensoren (optisch, mechanische) ? Wäre wichtig, da die entsprechend ausgewertet werden müssen. Erst nach einer Auswertung kann eine Aktion folgen.
Hallo, @Rooney Bob: genau darum ging es mir. Gerade ein Einsteiger sollte sich über solche Dinge klarwerden und einen machbaren Ablaufplan zusammenbasteln. Gruß aus Berlin Michael
Was habt ihr denn in der Ausbildung gelernt, wie ihr bei einem solchen Problem vorgehen solltet? Dass ihr ein Ablaufdiagramm habt ist ja schonmal die halbe Miete. Das Serialisieren der parallelen Prozesse könnt ihr erreichen, indem ihr einfach versuch ein Struktogramm daraus zu zeichnen oder das ganze in Pseudocode umformuliert - ich nehme mal stark an, dass ihr in der Richtung schonmal was gemacht habt. Der Pseudocode muss dann eigentlich nur noch in eine µC-kompatible Sprache eurer Wahl (BASCOM, C, AVR-Assembler) übersetzt werden und fertig ist. Gibt es den Roboter schon? Wie ist die Beschaltung der I/Os? Welche Sensoren verwendet ihr? Habt ihr alle Datenblätter der Sensoren vorliegen und wisst, wie die Kommunikation ablaufen soll? Habt ihr alle Entwicklerwerkzeuge da? Ich denke schon, dass dieser einfache Ablauf (sofern er denn stimmt) innerhalb von 2 Wochen zu schaffen ist, wenn euer Problem nur darin besteht euer Gedankengut in einen Controller zu schrumfen, aber sonst alles schon geht. Beschreib mal genauer, wo das eigentliche Problem ist. Fertigen Code schreibt euch hier keiner (wie du sicherlich schon rauslesen konntest). Aber helfen werden euch viele wenn man sieht, dass ihr euch bemüht und klar fomulieren könnt, woran es mangelt. Gruß Kai
Ach ja:
>kann mir jemand vielleicht ein gutes freeware uml programm empfehlen?
- ArgoUML
- StarUML
- Poseidon (von Gentleware)
- MS-Visio mit MSDNAA-Lizenz (müsst ihr eure Schule fragen)
Sollte alles für eure Zwecke reichen.
Poseidon hat eine Personal Edition und wäre meine eheste Empfehlung.
Da die Implementierung allerdings nicht objektorientiert sondern eher
prozedural erfolgt, empfehle ich nach der strukturierten Analyse
vorzugehen - es sei denn, ihr findet Entwickler-Tools, die die
Transformation für die Zielarchitektur hinbekommen. Daher mein Tipp auf
ein Struktogramm auszuweichen.
Naja, seid mal nicht zu optimistisch. Klar ist ein Ablaufplan schon mal etwas. Aber wer noch nie programmiert hat, geschweige denn auf einem Mikrocontroller - der wird allergrösste Mühe haben, dieses Schema umzusetzen und zu debuggen. Also Leute, es gibt nichts anderes als sich beinhart in die Materie reinknien. Bastelt euch ein Demoboard und einen ISP, holt euch ne passende IDE (z.B. AVRStudio) und dann los. Wenn ihr noch nicht programmieren könnt, würde ich mal sämtliche Wochenenden bis Mitte Sommer für die einplanenen, wenn ihr den Roboter so wirklich durchziehen wollt, noch etwas mehr. Entweder knallhart reinknien, Projekt massiv redimensionieren oder aber gnadenlos scheitern.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.