Guten Tag, ich versuche mich gerade daran, eine stromgesteuerte Bremse mit einem AVR zu anzusteuern (funktioniert mit PWM auch ganz gut). Der AVR soll zudem über ein Display das aufgebrachte Drehoment anzeigen. Da der Drehmomentverlauf nicht ganz linear ansteigt, habe ich das Drehmoment an der Welle über den Duty Cycle meiner PWM gemessen und den Verlauf in Excel mit einer Trendlinie nachvollzogen. Laut Excel lautet die Formel zur Trendlinie 6. Grades: y = 1E-10x^6 - 3E-08x^5 + 4E-06x^4 - 0,0003x^3 + 0,0087x^2 - 0,0227x Mithilfe dieser Formel soll der AVR nun das Drehmoment berechnen: unsigned int pwm_prozent; // PWM-Prozentwert 0...100 double moment_nm; double berechne_moment_nm(void) { moment_nm = (((double)(0.0000000001 * (pow(pwm_prozent, 6)))) - ((double)(0.00000003 * (pow(pwm_prozent, 5)))) + ((double)(0.000004 * (pow(pwm_prozent, 4)))) - ((double)(0.0003 * (pow(pwm_prozent, 3)))) + ((double)(0.0087 * (pow(pwm_prozent, 2)))) - ((double)(0.0227 * pwm_prozent))); return moment_nm; } Allerdings liefert mir der Controller nicht die erwarteten Ergebnisse. Als Controller verwende ich einen Mega16 mit dem Pollin-Board, als Compiler dient CodeVision, die math.h habe ich ebenfalls eingebunden! Kann das mit meinen Datentypen zusammenhängen? Habe auch schon mal gehört, dass es Probleme mit der pow-Funktion gibt, kann mir hier jemand weiter helfen? Vielen Dank schon mal im Voraus!
Schon mal was von der Horner Regel gehört?
y = a*x^2 + b*x
ist identisch zu
y = ( ( a * x ) + b ) * x;
(x wird einfach herausgehoben).
Damit wirst du die ganzen pow Aufrufe los, was der Genauigkeit
deiner Rechnerei zugute kommen dürfte (und schneller geht es
nebenbei auch noch)
y = (((((( 1E-10 * x ) - 3E-08 ) * x + 4E-06 ) * x - 0,0003 ) * x +
0,0087 ) * x - 0,0227 ) * x;
Wie sinnvoll es ist, die 6., 5. und 4. Potenz mit einzubeziehen
ist eine andere Frage, die man untersuchen müsste. Mit einem
WinAVR double, hast du gerade mal 6 bis 7 signifikante Stellen.
Und das wird dann schon mächtig eng.
> Wie sinnvoll es ist, die 6., 5. und 4. Potenz mit einzubeziehen ist > eine andere Frage, Der Wertebereich für x geht von 0 bis 100. Für x=100 liegen alle fünf Summanden des Terms in einer ähnlichen Größenordnung, so dass man keinen weglassen sollte.
Angehängte Dateien:
-

plot.png
12 KB
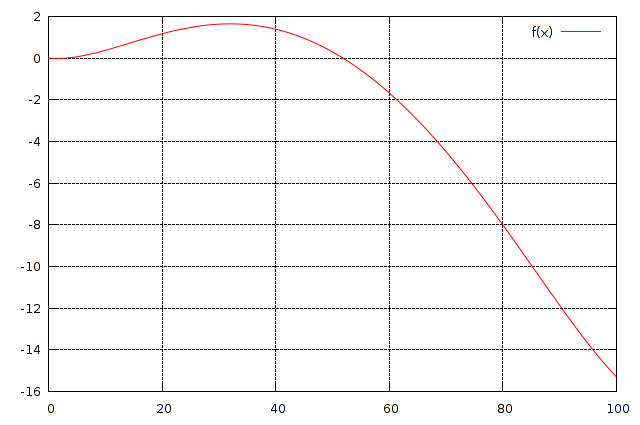
Die Funktion sieht für eine Bremse ja schon recht seltsam aus :) Oder sollte x vielleicht doch nur von 0 bis 1 gehen?
pow scheint im AVR-GCC nicht zu funktionieren. Für ganzzahlige Exponenten ist das aber schnell selber implementiert.
Garnix funktioniert. Das Problem hatte ich schonmal vor einer Weile. Spuckt irgendwelche Ergebnisse aus, die mit der Realität nix zu tun haben. Beitrag "pow()-Funktion"
Hallo, bau die Formel um. Nimm das Horner-Schema von Karl-Heinz. Weiterhin würde ich darüber nachdenken, die doubles in der Formel mit 1E10 zu multiplizieren, mit unsigned Ganzzahlen zu rechnen und das Ganze am Schluß zu dividieren, weil double beim GCC nur float-Genauigkeit hat. MfG Patrick
I_ H. wrote: > Garnix funktioniert. Das Problem hatte ich schonmal vor einer Weile. > Spuckt irgendwelche Ergebnisse aus, die mit der Realität nix zu tun > haben. > > Beitrag "pow()-Funktion" Schnee von gestern, davon abgesehen, dass dort auf Threads von 2004 verwiesen wird. Kurzes Testprogramm:
1 | Enter x, y: 3 3 |
2 | pow(3, 3) = 27 |
3 | Enter x, y: 3 5 |
4 | pow(3, 5) = 243 |
5 | Enter x, y: 5 3 |
6 | pow(5, 3) = 125 |
7 | Enter x, y: 2.54 3 |
8 | pow(2.54, 3) = 16.3871 |
9 | Enter x, y: 1e-5 2 |
10 | pow(1e-05, 2) = 1e-10 |
11 | Enter x, y: 1e-5 25 |
12 | pow(1e-05, 25) = 0 |
13 | Enter x, y: 2.5 2.5 |
14 | pow(2.5, 2.5) = 9.88211 |
15 | Enter x, y: -2.5 3 |
16 | pow(-2.5, 3) = -15.625 |
17 | Enter x, y: 10 3 |
18 | pow(10, 3) = 1000 |
19 | Enter x, y: 3 10 |
20 | pow(3, 10) = 59049 |
21 | Enter x, y: 2 10 |
22 | pow(2, 10) = 1024 |
23 | Enter x, y: 9 9 |
24 | pow(9, 9) = 3.8742e+08 |
25 | Enter x, y: |
Ziemlich viel für "garnix funktioniert", oder? Welche Zahlen soll ich dir noch eintippen?
Also vor ein paar Monaten hatte ich immernoch das Problem, auch mit einer aktuellen Verion. Btw. eintippen - du hast das aber schon auf 'nem AVR laufen lassen?
I_ H. wrote: > Btw. eintippen - du hast das aber schon auf 'nem > AVR laufen lassen? Ja, na klar. Ich habe immer irgendwo ein Gerippe für eine einfache stdio-Applikation via UART rumliegen, da habe ich einfach ein scanf() und ein printf() in einer Endlosschleife reingestopft. Wie gesagt, wenn du für die aktuelle Version (1.6.x) irgendetwas findest, wo pow() nicht geht (oder nicht im Rahmen der machbaren Genauigkeit), dann schreibe einen Bugreport. Momentan sehe ich keinen offenen.
Hab damals das neueste draufgemacht was der gentoo portage tree hergab (öhm... libc 1.4.6), und damit hat's nicht funktioniert. Hatte damals auch den passenden Bugreport gefunden, und mir dann pow(10, ...) selber geschrieben. Aber gut, wenn's inzwischen gefixt ist. Inzwischen ist 1.6.x auch im portage tree angekommen.
Ja, seit dem Weggang von Henrik Brix Andersen ist Gentoo's Support für die AVR-Toolchain ziemlich hinten runtergefallen, habe ich den Eindruck.
Hallo zusammen! An bounceboy: Bist du sicher, dass deine Interpolationsfunktion stimmt. Ich hatte mal den Fall bei einem NTC. Habe Werte aufgenommen und wollte die von Excel interpoliert haben. Ab dem dritten Grad kam nur noch Schrott raus. Die Interpolationspolynome haben die Stützstellen nicht mehr getroffen! Gib doch einmal die Interpolationsfunktion in Excel ein, und lass sie über die Messwerte legen.
Hallo, vielen Dank erst mal für eure Antworten...des Rätsels Lösung lag doch etwas näher als gedacht. Die Funktion, die mir Excel ausgegeben hat ist völliger Schwachsinn, warum auch immer?!? Habe das ganze mal in meinen grafikfähigen Taschenrechner eingedaddelt und komme auf das gleiche wie Yalu (Danke an dieser Stelle an Yalu und Andreas). Gibt es irgendwelche andere Möglichkeiten, Kennlinien mit durch Punkte mathematisch anzunähern?
Eine Interpolation bzw. Approximation durch ein Polynom n-ten Grades ist nicht immer geschickt. Oft ist es so, dass ein niedriger Grad zu ungenau wird, da die Kurve zu weit an den vorgegebenen Punkte vorbeiläuft, und ein hoher Grad zwar die Punkte trifft, aber zu unschönen Wellen zwischen den Punkten führt. Am besten ist es, wenn man die Physik hinter der ganzen Sache verstanden hat und eine allgemeine Funktion aufstellen kann, deren Parameter dann mit Hilfe der Stützpunkte geschätzt werden können. Oder man erkennt durch scharfes Anschauen der Punkte und ein wenig Ausprobieren, welcher Funktionstyp gut passen würde und schätzt die Parameter dann ebenfalls aus den Stützpunkten. An deiner Stelle würde ich die Messpunkte einfach mal posten, vielleicht hat ja jemand eine passende Idee.
Dann stell ich mal hier meine Parameter ein: PWM[%] M[Nm] 0 0 5 0,10 10 0,36 15 0,86 20 1,32 25 1,89 30 2,29 35 2,74 40 2,96 45 3,34 50 3,59 55 3,92 60 4,19 65 4,36 70 4,57 75 4,67 80 4,86 85 4,99 90 5,04 95 5,14 100 5,19 Wäre nett, wenn mir hier jemand mit einer sinnvollen und hinreichend genauen Funktion für den Wertebereich von 0 bis 100% aushelfen könnte. Vielen Dank
Nimm die Stützstellen, wie in deinem Post angegeben, und interpolier linear zwischen denen. Sollte hinreichend genau sein, und ist mit einer Zeile C erledigt.
Angehängte Dateien:
-

approx.png
16 KB
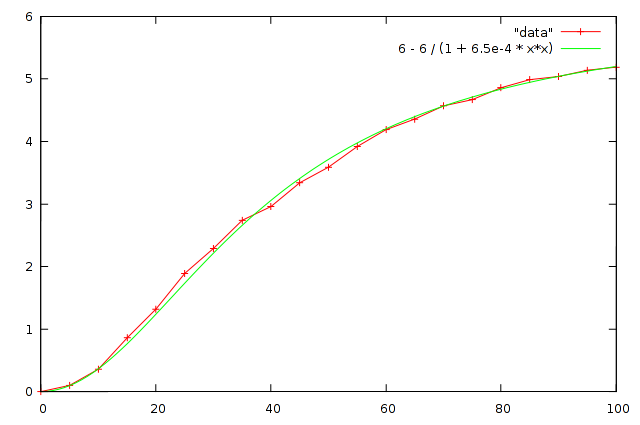
Ich habe gerade mal ein wenig rumgespielt. Mit Polynomen bin ich nicht sehr weit gekommen, mit
bzw.
1 | y = a - a / (1 + b * x*x) |
schon eher. Durch "visuelles Probieren" bin ich auf a=6 und b=6.5e-4 gekommen. Die Funktion ist relativ leicht zu berechnen (auf jeden Fall leichter als ein Polynom 6ten Grades), und der Approximationsfehler könnte noch halbwegs in der Größenordnung der Messfehler liegen. Die Ergebnisse im Vergleich (ym: gemessen, ya: approximiert): x ym ya Fehler 0 0.00 0.00 0.000 5 0.10 0.10 -0.004 10 0.36 0.37 0.006 15 0.86 0.77 -0.094 20 1.32 1.24 -0.082 25 1.89 1.73 -0.157 30 2.29 2.21 -0.075 35 2.74 2.66 -0.080 40 2.96 3.06 0.099 45 3.34 3.41 0.070 50 3.59 3.71 0.124 55 3.92 3.98 0.057 60 4.19 4.20 0.014 65 4.36 4.40 0.038 70 4.57 4.57 -0.004 75 4.67 4.71 0.041 80 4.86 4.84 -0.023 85 4.99 4.95 -0.043 90 5.04 5.04 0.002 95 5.14 5.13 -0.014 100 5.19 5.20 0.010
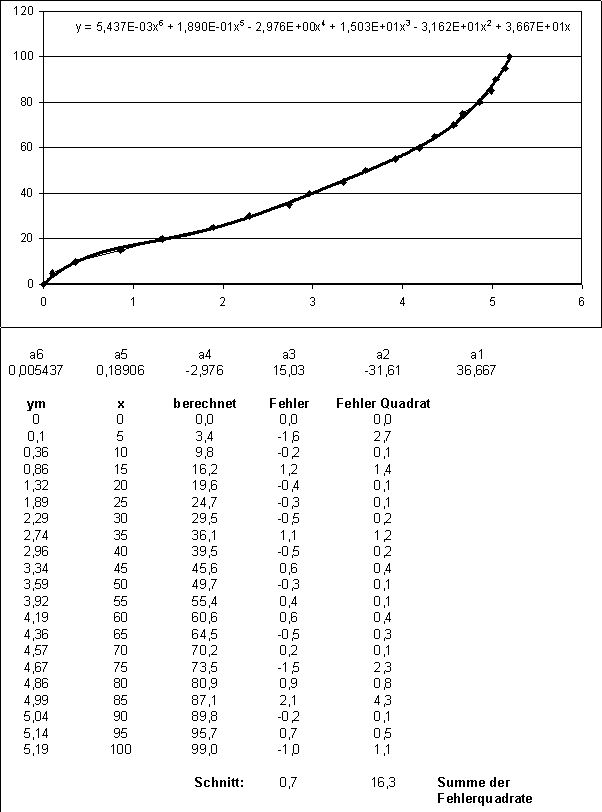
Kleiner Tip zu Excel: y = 1E-10x^6 - 3E-08x^5 + 4E-06x^4 - 0,0003x^3 + 0,0087x^2 - 0,0227x Das Ergebnis 1E-10x^6 ist zu ungenau. Dazu die errechnet Funktion mit der rechten Maustaste anklicken und als Zahlenformat Wissenschaftlich mit 3 oder 4 Nachkommastellen wählen. Benötigst Du nicht die Umkehrfunktion? Du möchtest z.B. mit 3 Nm bremsen und benötigst die Pulsweite dazu. X und Y vertauschen und dann nochmal eine neue Funktion suchen. Oder y = a - a / (1 + b * x*x) nach x umstellen x = sqr((a/(a-y)-1)/b)
Angehängte Dateien:
-

Umkehrfunktion.gif
9,9 KB
{kind=link}
Das Polynom laut Excel funktioniert ganz gut: y = 5,437E-03x6 + 1,890E-01x5 - 2,976E+00x4 + 1,503E+01x3 - 3,162E+01x2 + 3,667E+01x Aber y = sqr((a/(a-x)-1)/b) mit a = 5.989, b = 0.00065 kostet weniger Rechenleistung. Im Wertebereich x >= 0 und x <= 5.19 ist die Funktion stetig. Aber x muss vor dem Aufruf der Wurzelfunktion überprüft werden.
1 | int nm2pwm(float nm) |
2 | {
|
3 | int pwm; |
4 | |
5 | if (nm < 0) |
6 | pwm = 0; |
7 | else
|
8 | if (nm > 5.19) |
9 | pwm = 100; |
10 | else
|
11 | pwm = sqr((5.989/(5.989-nm)-1)/0.00065); |
12 | |
13 | return pwm; |
14 | }
|
Eine weitere Möglichkeit wäre, die Funktion aus 3 einfachen Polynomen 2. Ordung in der Form: y = a0 + a1*x + a2*x*x zusammenzusetzten. Die 3 Bereiche wären dann z.B. 0 - 1 Nm, 1 - 4 Nm und 4 - 5.19 Nm
1 | int nm2pwm(float nm) |
2 | {
|
3 | if (nm < 0) |
4 | return 0; |
5 | else
|
6 | if (nm < 1) |
7 | return // hier Polynom 1 |
8 | else
|
9 | if (nm < 4) |
10 | return // hier Polynom 2 |
11 | else
|
12 | if (nm < 5.19) |
13 | return // hier Polynom 3 |
14 | else
|
15 | return 100; |
16 | }
|
Etwas Mühe macht es, die Polynome and den Grenzstellen genau aufeinandertreffen zu lassen. Aber das Ergebnis wäre schnell und genau.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.