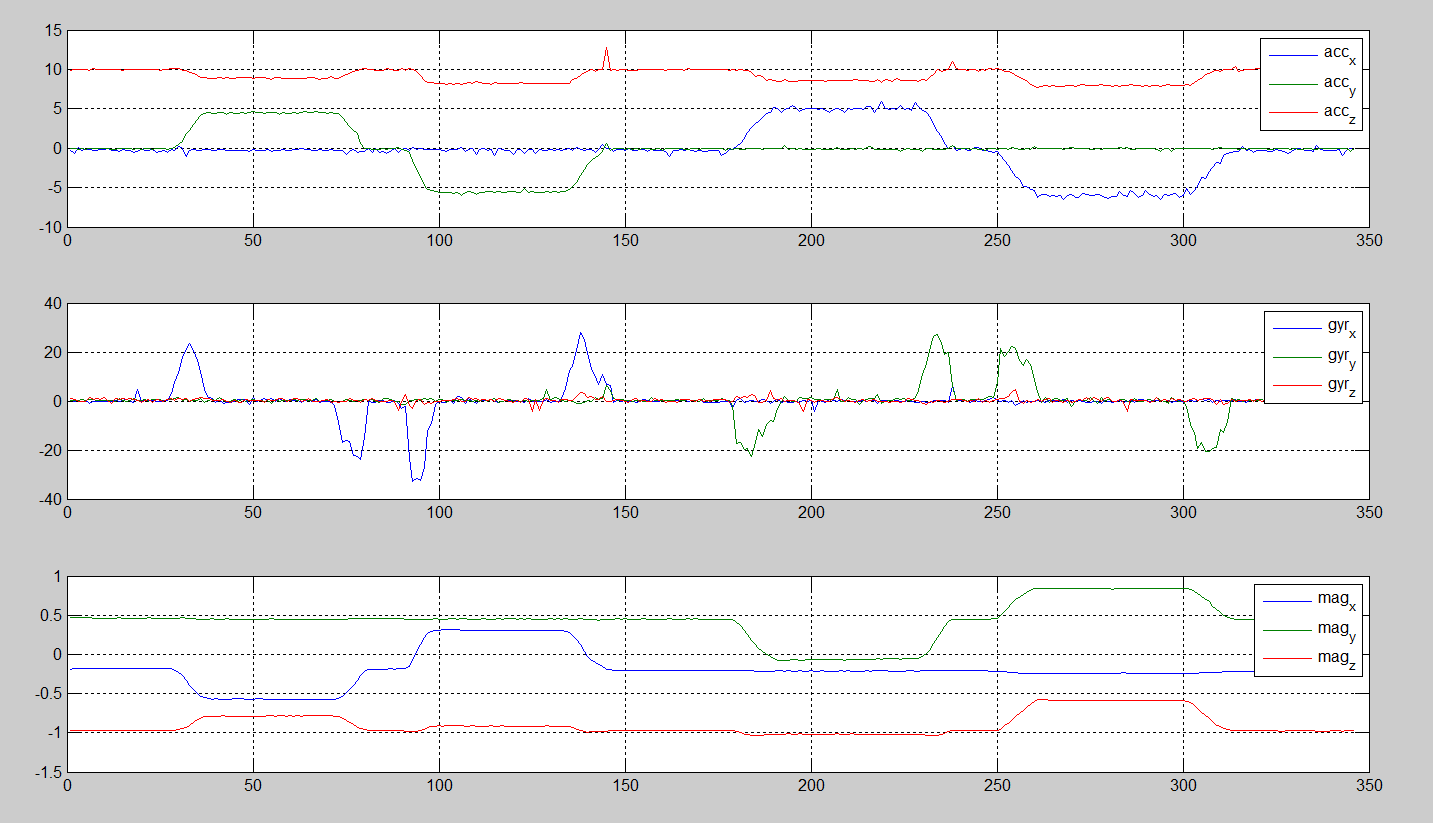
Hallo Zusammen, ich arbeite momentan an einem EKF (Extendet Kalman Filter) mit 6 Zuständen. Der EKF erhält Daten vom Acc, Gyro und Mag. Neben den 4 Quaternionen wird der Gyro Offset geschätzt. Leider klappt die Schätzung des Gierwinkels nicht sonderbar gut. Sobald ich das Sensorboard um die x- bzw. y-Achse drehe, ändert sich fälschlicherweise der Gierwinkel (Drehung um die z-Achse). Der geschätzte z-earth vector wird allerdings korrekt ausgegeben, der Fehler müsste also bei der Berechnung des Gierwinkels durch den Mag entstehen. Und da weiß ich momentan nicht weiter, hab schon alles mehrfach überprüft. Sicherheitshalber habe ich die Sensorwerte mal angehängt. Die Mag Werte finde ich allerdings nicht ganz plausibel!?!? Auch die EKF C Files liegen bei und stehen zur freien Verfügung. Hoffe jemand kann mir dabei helfen, Sam
Angehängte Dateien:
-

Unbenannt.PNG
17 KB
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.