Hallo Ich entwickle für einen Hexacopter einen FC. Ich habe schon alles realisiert. Jetzt muss nur noch der Regler eingestellt werden. Die Theorie für die Regelung habe ich von dieser Webseite übernommen: http://www.rn-wissen.de/wiki/index.php/Regelungstechnik Ich habe jedoch eine Frage zu den I-Anteil: Wenn ich über eine längere Zeit (2-3s) den Hexacopter in eine Schräglage halte, versucht der Hexacopter durch den I-Anteil dies immer stärker auszugleichen. Aber wenn ich nun den Hexacopter in die Mitte zurückgehen lasse, wie kann der I-Anteil überhaupt null werden? Denn es wird ja immer so aufsummiert: esum = esum + e; e ... Sollwert - Istwert Ich verstehe daher nicht ganz wie esum überhaupt null werden kann, wenn der Copter wieder in der Mitte ist. Kann mir das einer erklären? Danke im Voraus für eure Hilfe LG Marcel
Hallo Marcel, der I-Anteil ist normal der Anteil, der sehr gering in den Regler eingreift. Nur eben über die Zeit. Der P-Anteil geht am meisten in den Regler ein und sollte auch schnell reagieren. Jetzt zu deiner Frage. esum = esum + e ---> e gibt es auch mit -e sprich wenn der Kopter zum Ausgleich über die Mitte Überschwingt wird e negativ und gleicht sich aus. Aber was passiert wenn der Kopter in der schräg Lage gehalten wird.... ja dann wächst esum an. Um ein Überschwingen zu dämpfen, wenn der Kopter wieder frei gelassen wird, kann man ein Max esum einbauen. Sprich esum darf einen Wert nicht überschreiten. ( Dabei Vorzeichen beachten !!) Gruß Thomas
Danke Thomas für deine Hilfe. Mir ist auch eine andere Möglichkeit eingefallen das Problem zu lösen: Ich speichere die letzten Werte in einem Array. Dadurch werden nur eine bestimmte Anzahl von Werten in die Berechnung mit einbezogen. Aber deine Idee hört sich auch sinnvoll. LG Marcel
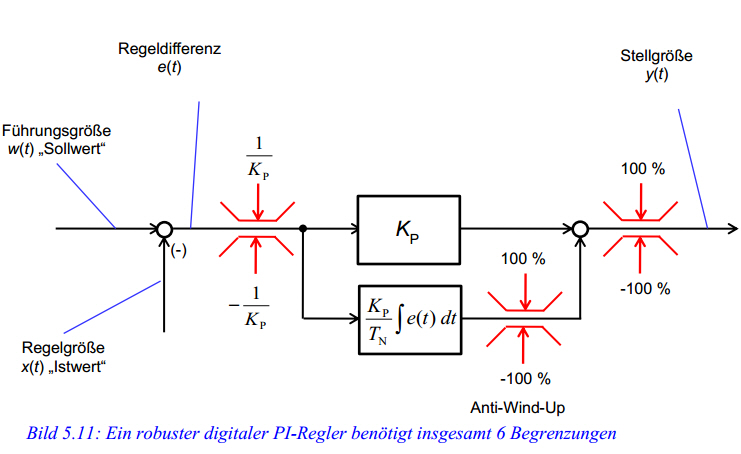
Der Ueberschwing I-anteil wird vom P-anteil solange korrigiert, bis der P-anteil Null ist. Der I-Anteil wird festgehalten sobald das Stellglied an die Begrenzung kommt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.