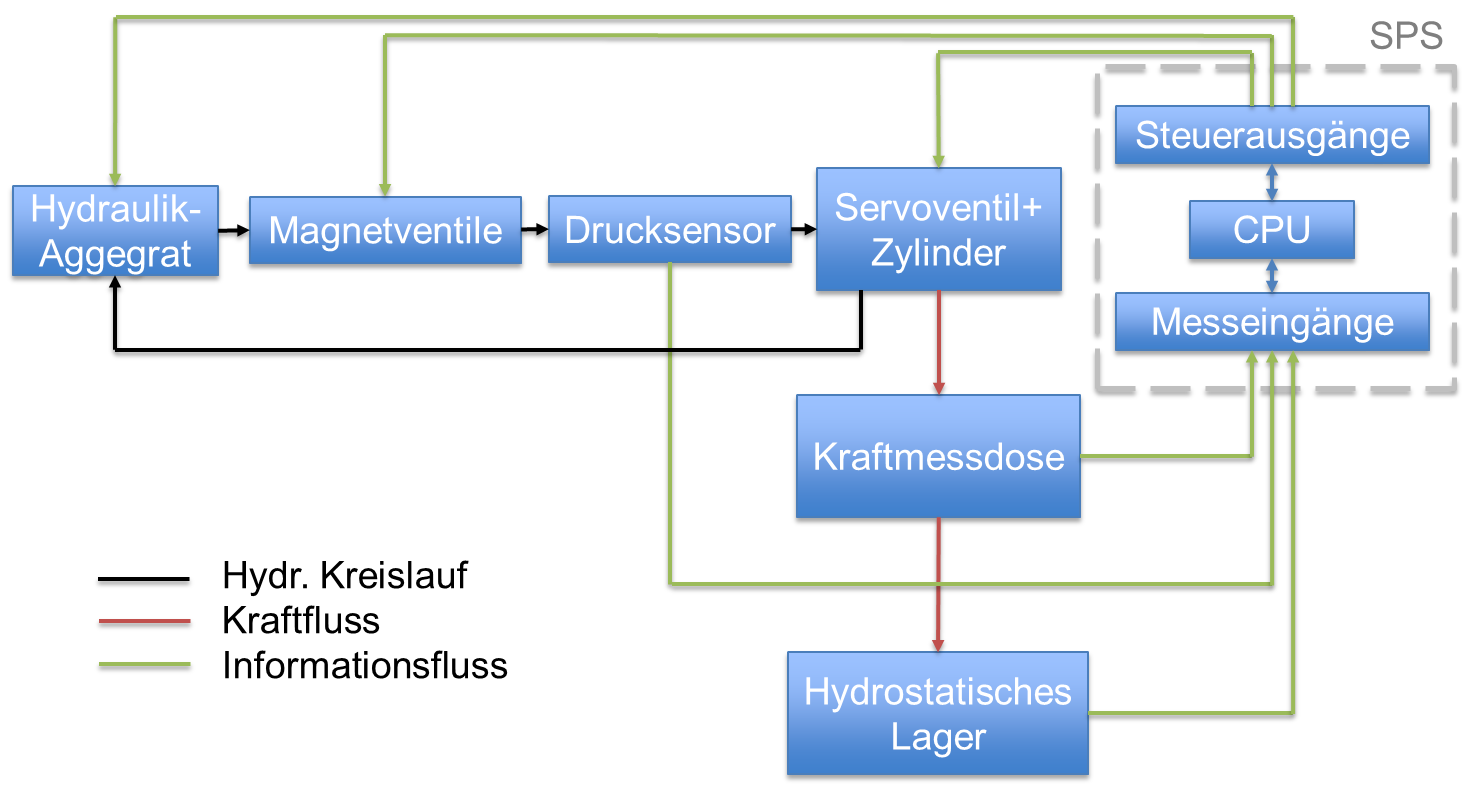
Hi! Folgende Aufgabenstellung hätte ich zu bewerkstelligen: Für verschiedenste periodische Eingangsssignale [Sinus; Rechteck; Dreieck; Trapez, ...] mit Amplituden von [0.5KN bis 10KN] und unterschiedlichsten Gleichanteilen möchte ich eine Kraftregelung entwerfen. Zum Verständnis habe ich auch ein Schema gezeichnet, bei dem man den Regelkreis erkennen kann (Der Drucksensor dient nur zur Überwachung). Um das zu bewerkstelligen habe ich mir auf der SPS verschiedene Werkzeuge gebastelt: *Aufnahme der Sprungantwort -> zeitl. Verläufe der Sprungantworten *Aufnahme des Zeitverhaltens -> zeitl. Verläufe bei periodischer Anregung *Aufnahme des Frequenzverhaltens -> Bode-Diagramm All die Werkzeuge lassen sich automatisieren (verschiedene Lastkollektive bei verschiedenen Reglerparametern etc) - das habe ich aber noch nicht umgesetzt, da viel Arbeit. All die Untersuchungen geschehen bei geschlossenem Regelkreis. Erste Experimente ergaben, dass ein PI-Regler ausreichen sollte um die Regelung zu bewerkstelligen. Allerdings zeigt das System recht komplexes Verhalten (siehe Bild im Anhang), was nicht auf einfache Parameterführung am Regler schließen lässt. Nun gehts an die Reglersynthese und da stehe ich das erste mal an. Ich bräuchte kreativen Input aus der Praxis bezüglich folgender Punkte: (1) Wie setze ich die obigen Werkzeuge am Besten ein, damit ich bei vertretbarem Aufwand zu einem guten Ergebnis komme? (2) Wie sollte ein vernünftiges Ergebnis überhaupt aussehen? Dazu habe ich mir bereits ein paar Gedanken gemacht: Für die Synthese: Man könnte Sinus, Rechtecke und Dreiecke mit verschiedenen Amplituden fahren (zB Schrittweite 500N). Dabei permutiert man die Parameter; natürlich in vernünftigen Grenzen. Danach errechnet man sich die Steigungen in jedem Zeitschritt für jedes Lastkollektiv und ordnet ihm ein optimales Parameterpaar (kp, ki) zu. Wie ich das Frequenzverhalten da mit hineinnehme weiß ich allerdings nicht. Im Betrieb: Jedesmal wenn dann im Betrieb ein Lastkollektiv generiert wird, wird für jeden Zeitschritt ein optimales Parameterpaar aus dem Katalog hinterlegt. Wird das Lastkollektiv nun periodisch abgefahren, so wird auch der auf die konkrete Problemstellung reduzierte Parameterkatalog periodisch durchlaufen. Interpolieren wäre natürlich auch möglich! Und, so könnte man auch nicht-periodische Signale behandeln (als dicke Draufgabe!!!) Ich hoffe euch mit dem überlangen Beitrag nicht komplett verwirrt zu haben, es geht mir hier kurzum um eine Frage nach einer praxistauglichen Herangehensweise an die Reglersynthese und den anschließendene -entwurf. Sollte die Antwort nur aus einer Buchempfehlung bestehen, ist mir auch schon geholfen! Vielen Dank für eure Einwürfe! LG LeFish
Angehängte Dateien:
-

Schema.png
88 KB
Nachreichen möcht ich noch die Sprungantwort zu obigem Beispiel! LG LeFish
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.