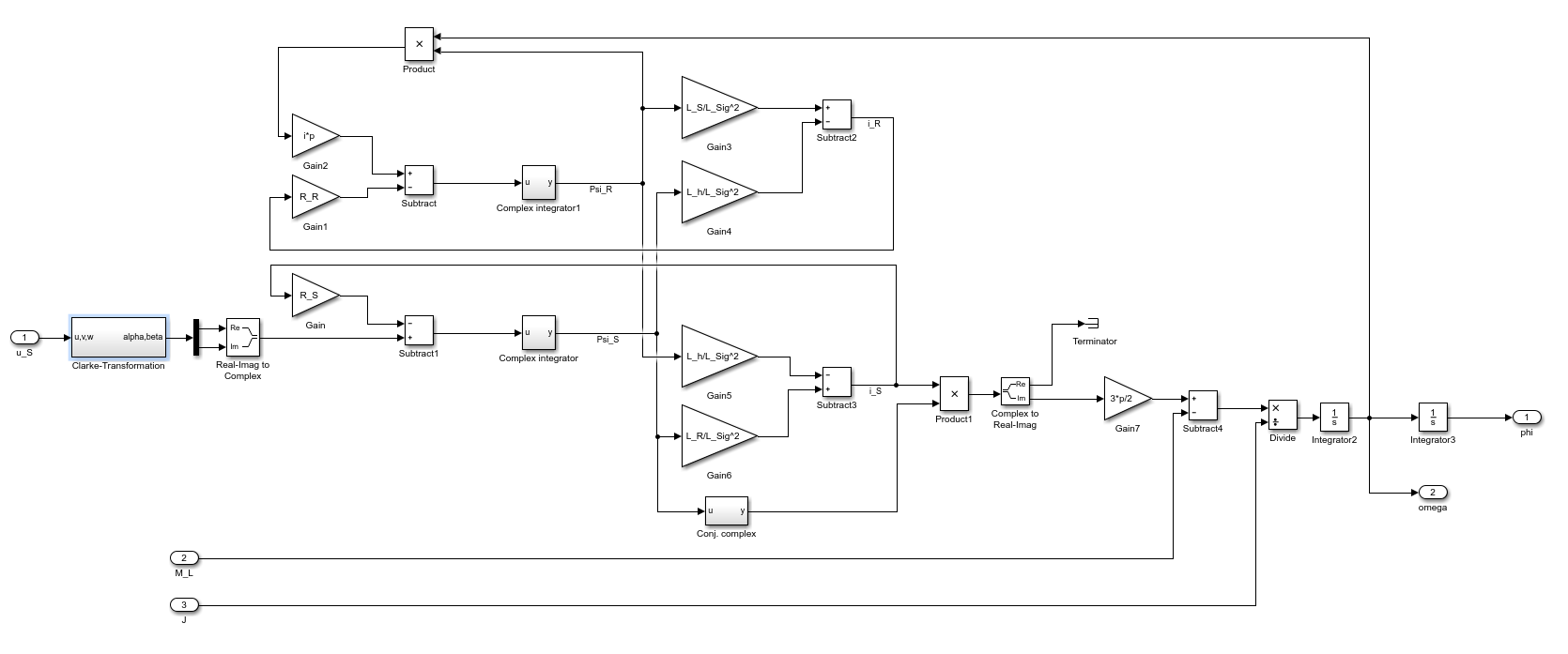
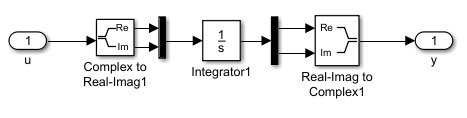
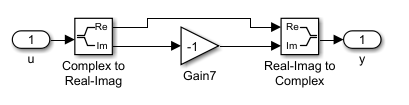
Hallo Gemeinde, seit einigen Tagen versuche ich das zeitliche Verhalten eines Asynchronmotors in MATLAB Simulink zu simulieren. Dazu habe ich das Buch "Geregelte Antriebe mit Drehfeldmaschinen und selbstgeführten Stromrichtern" (Ausgabe 2019) von Felix Jenni gefunden. https://felixjenni.ch/dokumente/Ger_Antriebe.pdf Dafür habe ich die Gleichungen 4.53 bis 4.58 aus dem Kapitel 4.4.1 (Seite 54) in Simulink umgesetzt. Mein Simulink Modell entspricht damit dem Blockdiagramm aus Abbildung 4.22 (Seite 58). Leider ist das System mit und ohne Lastmoment instabil. Leider kann ich den Fehler nicht finden. Für die Integration von komplexen Zahlen (Psi_R und Psi_S) und für die Berechnung der konjugiert komplexen Zahl (Psi_S*) habe ich Subsysteme erstellt, die im Anhang zu sehen sind. Vielleicht kann mir jemand helfen und hat eine Idee, wo der Fehler sein könnte? Danke und viele Grüße Der Simulant
Angehängte Dateien:
-

ASM.png
63 KB -

Komplexer_Integrator.png
5,5 KB -

Konjugiert_Komplex.png
4,6 KB
Hallo, ich denke ich habe den Fehler gefunden: Das Quadrat der Hilfsinduktivität war größer als das Produkt aus L_S und L_R womit L_Sig einen imaginären Wert hatte. Jetzt scheint es gut zu laufen. Danke alle! Grüße Der Simulant
Hallo Simulant, auch wenn dein Post schon etwas her ist, kannst du mir vielleicht weiterhelfen. Ich bin gerade dabei auch ein Modell einer Asynchronmaschine in Simulink umzusetzen und habe zufällig deinen Beitrag hier entdeckt. Wenn ich das Blockschaltbild wie bei dir zu sehen nachbaue, benötigt meine Simulation Tage um zu rechnen. Hast du hier irgendwas besonders eingestellt? Viele Grüße Matlab Amateur
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.