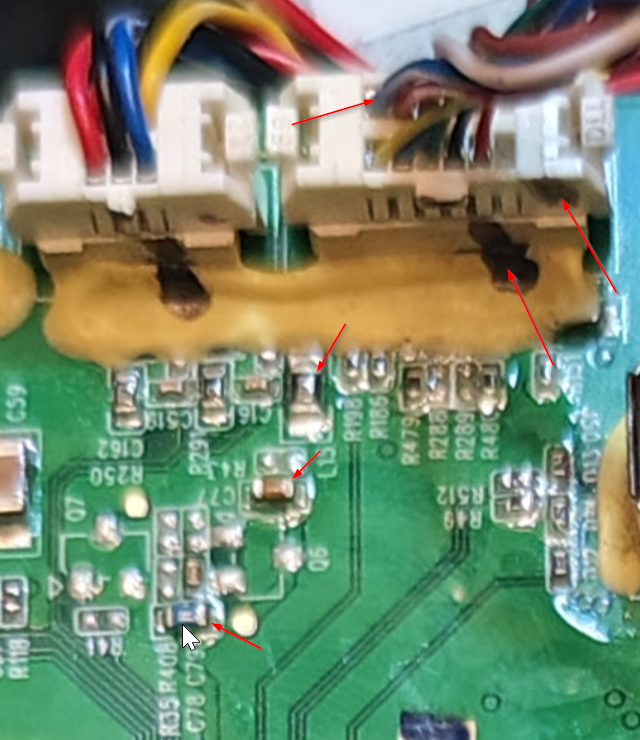
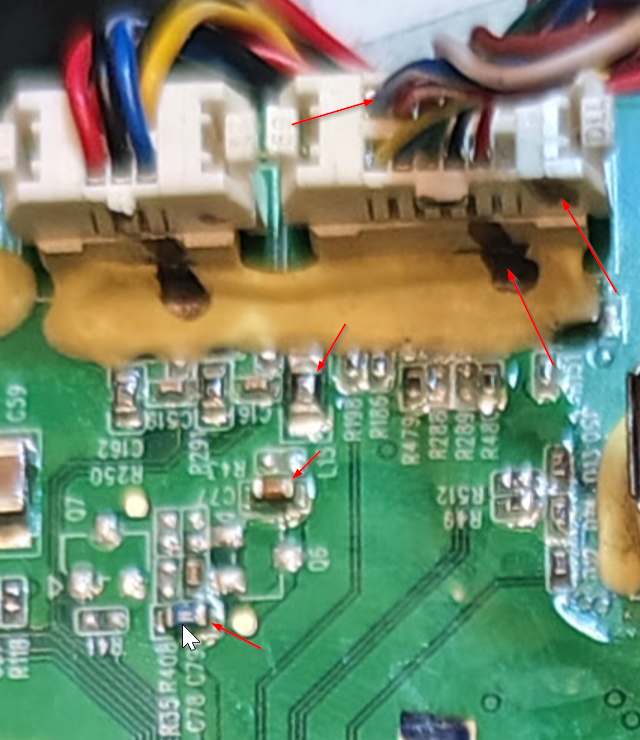
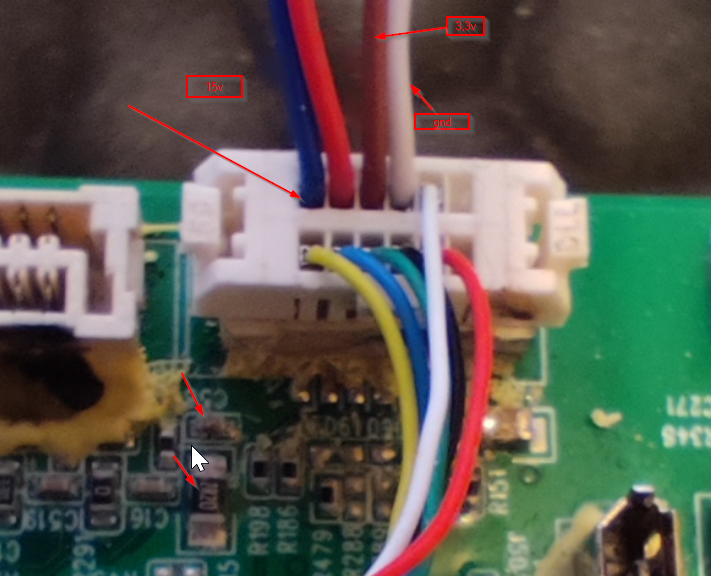
Hallo leider komme ich nicht weiter vielleicht kann mir jemand einen Tipp geben. Der Roboter läuft los uns meckert nmach ein Drehung man soll die Absturzsensoren reinigen. 1. Die Markierung des Connectors passt nicht, bei den anderen passt die Edding-Markierung. Ich befürchte das es neues Teil verbaut wurde was nicht zu dieser Version des Mainboard passt.(ich finde aber keine andere es scheint nur die zu geben!) Der blaue Pin sollte der Ground der IR-LED sein auf der Platine messe ich gegen ground aber volle Akkuspannung. Von dem Pin blau geht es auf der Platine zu einem cap->2r20->cap- N/Z Fuse Der Rote sollte wie bei anderen Absturzsensoren 3,3v haben Braun und weiß gegen zur Fotodiode die haben an allen anderen connectoren der anderen 4 sensoren 0V, hier hat der Braune aber 3,3v. Bei den anderen Connectoren ist immer erst ground, 3,3v für die IR-LED und dann 2 Pins für die Fotodiode. Der dünne weiße hat 5V für einen anderen Sensor. Ich habe die Vermutung das alles fotodioden in reihe geschalten sind? mit akkuspannung? und das pin 3-4 für die IR-LED sein sollte. Ich kann aber pin blau rot keinen durchgang zu den anderen messen, was dem wiederspricht. das messen auf der platuine macht keien spaß alles mit silikon voll und vias die irgendwo hin führen. Platine:Ecovacs 201-2417-2408 Hauptplatine von Deebot Sensorkabel:Ecovacs 201-2417-2330 Rechtes Anti-Drop- und Stoßstangenkabel für Staubsauger-Roboter
Angehängte Dateien:
-

Deebotx8_1.png
590 KB -

Deebotx8_1.png
590 KB -

Deebotx8_2.png
450 KB
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.