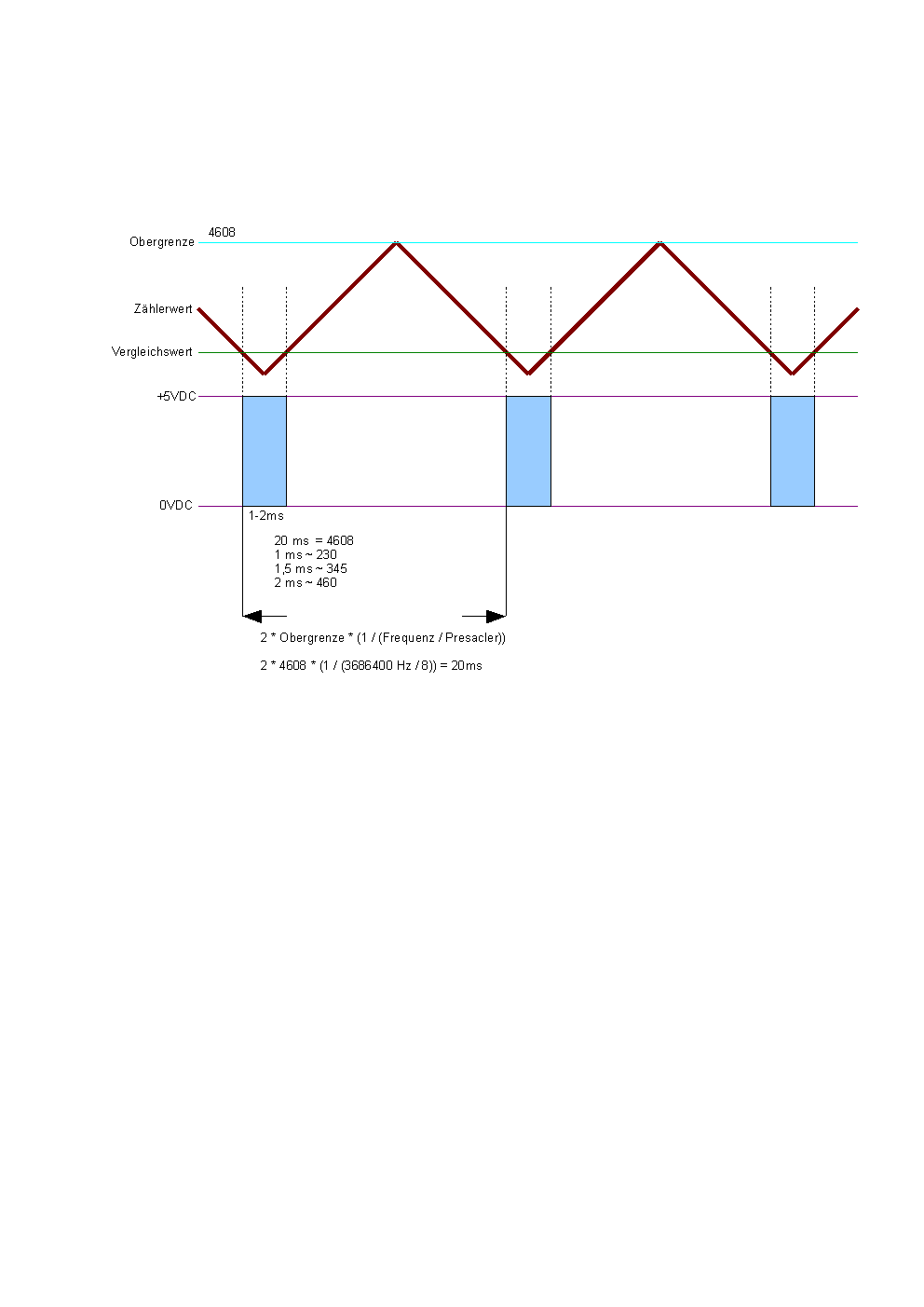
Hi, Ich weiss das das schon oft gefragt wurde, aber eine Klare Antwort hab ich auch nach Tagelangem suchen noch nicht gefunden. Im Anhang ist eine Grafik die sich an die des Tutorials anlehnt. Ist das was ich in dieser Grafik gezeichnet habe soweit korrekt ?? Ich möchte mittels der PWM eines 8515 einen Servo (Conrad 4,95) ansteuern. Ist es richtig das die Periodendauer 20ms betragen sollte, aber eher unkritisch ist, und der Puls zwischen 1 und 2ms ?? Ist meine Berechnung der Obergrenze und des Vergleichswertes so richtig ?? Dank für eure Antworten! Bouni
Angehängte Dateien:
-

PWM.png
8,8 KB
@Elias B. (bouni) Nach meinen Informationen hast du deine Fragen schon selbst richtig beantwortet.
Hi, Hab mir das Tutorial nochmal durchgelesen und bin stutzig geworden. Was hat es mit den 8, 9 oder 10Bit auf sich? Im Tutorial steht das dadurch die Obergrenze gesetzt wird (10-Bit = 1023), Im Beispielprogramm jedoch steht
1 | // den Endwert (TOP) für den Zähler setzen
|
2 | // der Zähler zählt bis zu diesem Wert
|
3 | |
4 | ICR1 = 0x6FFF; -> 28671 dez |
Wieso ist die Obergrenze grösser als 10-Bit ??
1 | TCCR1A = (1<<WGM11)|(1<<WGM10)|(1<<COM1A1); |
Denn hier wird ja WGM11 & WGM10 auf 1 gesetzt = 10Bit PWM. Ich steh auf m Schlauch :) Danke für eure Hilfe Bouni
Das is sicher n Druckfehler. Wenn du das binär mal anschaust, muss statt der 6 eine 3 stehen. Also 0x3FFF
Elias B. wrote: > Hab mir das Tutorial nochmal durchgelesen und bin stutzig geworden. > Was hat es mit den 8, 9 oder 10Bit auf sich? Das legt eine feste Obergrenze (TOP) und damit abhängig vom eingestellten Prescaler-Wert eine feste PWM-Frequenz fest. > Im Tutorial steht das dadurch die Obergrenze gesetzt wird (10-Bit = > 1023), > Im Beispielprogramm jedoch steht > [...] > Wieso ist die Obergrenze grösser als 10-Bit ?? > >
1 | > TCCR1A = (1<<WGM11)|(1<<WGM10)|(1<<COM1A1); |
2 | >
|
> > Denn hier wird ja WGM11 & WGM10 auf 1 gesetzt = 10Bit PWM. Und was ist mit WGM12 und WGM13 im TCCR1B? Wenn WGM13 auch gesetzt ist (was ich aus dem Zusammenhang heraus mal vermute), dann ist das nämlich keine 10-Bit-PWM, sondern Phase Correct PWM mit ICR1 als TOP... Bei 8-, 9- und 10-Bit-PWM wird der TOP-Wert nicht explizit angegeben, sondern ist fest vorgegeben (eben je nachdem 0xFF, 0x1FF oder 0x3FF). Wenn im ICR1 ein TOP-Wert angegeben wird, dann handelt es sich um einen anderen PWM-Modus, bei dem TOP frei gewählt werden kann.
Micha R. wrote: > Das is sicher n Druckfehler. Und nein, das ist höchstwahrscheinlich kein "Druckfehler" > Wenn du das binär mal anschaust, muss statt der 6 eine 3 stehen. > Also 0x3FFF Siehe oben. 0x3FFF wären übrigens 14 Bit, und die gibt's nicht als feste Obergrenze... Es gibt übrigens im Datenblatt eine schöne, übersichtliche und mit Liebe gemachte Tabelle (steht bei der Beschreibung der Steuerregister des Timers), in der alle Timer-Betriebsarten mit den dazugehörenden Konfigurationen der 4 Steuerbits WGM13..10 dargestellt sind. Und jetzt frag bitte keiner, wo man denn das Datenblatt herbekommt...
Johannes M. wrote: > Micha R. wrote: >> Das is sicher n Druckfehler. > Und nein, das ist höchstwahrscheinlich kein "Druckfehler" > >> Wenn du das binär mal anschaust, muss statt der 6 eine 3 stehen. >> Also 0x3FFF > Siehe oben. 0x3FFF wären übrigens 14 Bit, und die gibt's nicht als feste > Obergrenze... Ich entschuldige mich vieltausendmal für diese Fehlinformation von mir. Soll nicht wieder vorkommen.
Elias B. wrote: > Der Vollständigkeit halber: > > Hier die Tabelle: Das hättest Du Dir sparen können, steht alles im Datenblatt (und v.a. in besserer Qualität!). Allerdings hatte ich mich oben verguckt. Du hattest geschrieben, dass WGM11 und WGM10 gesetzt sind. Dann macht das mit ICR1 keinen Sinn. ICR1 wird nur in den Modi 8, 10, 12 und 14 benötigt. Der "Fehler" liegt also woanders. EDIT: Im Tutorial (habe grad nachgesehen) steht erstens eindeutig, dass es sich auf PWM-Modus 14 bezieht (wie von mir bereits weiter oben wegen der Benutzung von ICR1 vermutet) und zweitens nichts davon, dass WGM10 gesetzt werden soll! Klar, dass das mit den Angaben widersprüchlich ist. Das "1 << WGM10" gehört da schlicht und ergreifend nicht hin. Wenn Du Änderungen am Code des Tutorials machst, darfst Du Dich nicht wundern, wenn er nicht das macht, was da steht.
So, nach weiterer Recherche neue Erkenntnisse: In http://www.mikrocontroller.net/articles/AVR-GCC-Tutorial#PWM_.28Pulsweitenmodulation.29 steht eine Beispielzeile im Text, in der beide WGM-Bits in TCCR1A gesetzt werden. Diese Zeile gehört aber nicht zum Initialisierungsbeispiel für Modus 14 darunter, aus dem die Zeile "ICR1A = 0x6FFF;" stammt! Deshalb gehören die beiden Zeilen, auf die sich die Frage bezog, gar nicht zusammen. Das Beispiel zur Initialisierung für Modus 14 ist soweit völlig korrekt und vollständig. Die andere Zeile ist nur als Beispiel für die Verwendung der (mittlerweile gar nicht mehr so) neuen Bezeichnungen der Bits gedacht.
Hallo zusammen, Ich bin grade wieder am servo probieren. Ich bin jetzt so weit das er an den Anschlag im Uhrzeigersinn läuft :( Ich arbeite mit folgendem Code auf dem Atmega8515L:
1 | #include <avr/io.h> |
2 | |
3 | int main() |
4 | {
|
5 | |
6 | DDRB = (1 << PD5 ); |
7 | |
8 | // beim Atmega 8515L der OC1A
|
9 | |
10 | TCCR1A = (1<<COM1A1) | (1<<WGM11); |
11 | TCCR1B = (1<<WGM13) | (1<<WGM12) | (1<<CS01); |
12 | |
13 | // CS02 CS01 CS00 Description
|
14 | // 0 1 0 clkI/O/8 (From prescaler)
|
15 | //
|
16 | // Mode WGM13 WGM12 WGM11 WGM10 Typ TOP UPDATE
|
17 | // 14 1 1 1 0 Fast PWM ICR1 BOTTOM
|
18 | //
|
19 | // COM1A1 = 1 :Clear OC1A/OC1B on Compare Match (Set output to low level).
|
20 | |
21 | ICR1 = 0x1200; // = 4608 dezimal |
22 | |
23 | OCR1A = 0x0159; // = 345 dezimal |
24 | |
25 | |
26 | while( 1 ) |
27 | ;
|
28 | }
|
Mein CPU Takt ist 3686400 Hz Mein Prescaler ist 8 Prescaled Takt = 460800Hz Periodendauer = 1/460800Hz = 2,17e-6 sek für 20ms brauche ich demnach 0,02s/2,17e-6s = 9216 Perioden, Da aber nur die hälfte der 20ms hochzuzählen ist ist die Obergrenze bei 4608 zu setzen. 4608 dez = 0x1200 Da der Servo zwischen 1 und 2ms Takte braucht um die Position anzufahren muss ich den Zählerwert zwischen 4608/20ms = dez 230 und 4608/(20ms*2) = dez 460 wählen die Mittelstellung sollte demnach bei dez 345 liegen (0x159) Das tue ich doch, aber wo liegt mein Fehler ?? Ich bin ratlos! Danke im Voraus Bouni
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.