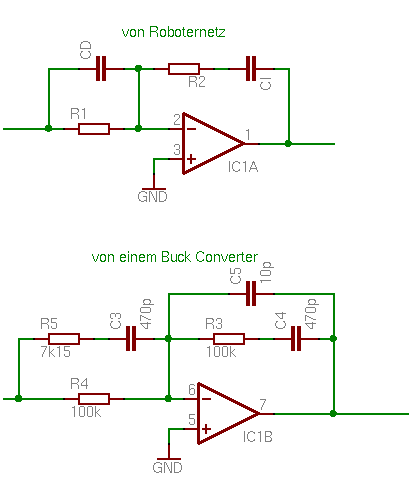
Hallo, ich hab ein Bild angehängt, auf dem man den PID-Regler von Roboternetz sieht, für die es auch die Formeln zum Berechnen der Größen Kp, Ki und Kd gibt. [1] Auf dem Bild gibt's außerdem eine Schaltung für einen Schaltregler, aus einer Applikation-Note, die genau ein PID-Regler sein sollte. Der OP ist eingebaut, die Komponenten werden außen angeschlossen. Hat jemand eine Ahnung, wie ich die Formeln von Roboternetz anpassen muss, dass ich Kp, Ki und Kd für die Schaltung, wie sie bei dem Schaltregler ist, erhalte? lg Gast, der sich schon tagelang die Finger wund-gegoogelt hat :-( [1]: http://www.roboternetz.de/wissen/index.php/Regelungstechnik#PID-Regler
Angehängte Dateien:
-

pi.png
2,8 KB
Du stellst einfach die Gleichung Ua/Ue auf und dann ist der Kp-Anteil der ohne komplexe Größe der Ki-Anteil mit iw im Nenner und der Kd-Anteil der mit iw im Zähler. Der Grundlage bildet die invertierende Grundschaltung mit zwei komplexen Widerständen Z1 und Z2, die du vorher berechnest und dann einfach in die Gleichung einsetzt.
>Gast, der sich schon tagelang die Finger wund-gegoogelt hat :-(
Ein PID Regler ist so etwas Triviales wenn man daruber nachdenkt. Aber
Kugeln scheint beliebter zu sein....
Angehängte Dateien:
-

pid2.png
2,9 KB

@ich: Danke für den Tipp, ich konnte die Formeln vom Roboternetz herleiten, den Rest schaff ich dann (wahrscheinlich) auch noch :-) (Bild im Anhang ...)
Hallo und guten Morgen, ich plag mich immer noch mit dem digitalen PID rum und hab jetzt 2 Ansätze gefunden ... In den meisten Datenblättern ist die Spezifizierung mittels Polen und Nullstellen in der gebrochen rationel Transfer-Funktion angegeben. Also eigentlich müsste man die Laplace-Transformierte nur ins zeitdiskrete (z-transformierte) übersetzen und könnte dann die IIR-Filter-Struktur quasi direkt ablesen. Bin ich da soweit korrekt? Der zweite Ansatz wäre, das Ganze auf ein PI-Filter zu beschränken, wie von Roboternetz. Das ist aber irgendwie nicht das Optimale, wobei es wohl gut genug gehen würde ... Die Unterschiede zwischen verschiedenen PI-Filtern mit einem oder 2 Polen gibts hier, für interessierte: http://www.analog-europe.com/howto/207602998?pgno=3 lg Gast
Ja. Entweder s->z transformieren (Abtasttheorem beachten!) oder die Sprungantwort in FIR-Filterkoeffizienten überführen. Beides hat mehr oder weniger Fehler (besonders wenn \Omega gegen 1 strebt). Es gibt noch ein paar andere, eher numerische Ansätze, optimale Koeffizienten für ein gegebene Übertragungsfunktion in digitale Filter zu überführen. Aber im Allgemeinen reichen die allgemeinen Ansätze. Man kann, zur Not, auch noch eine Fensterung der Sprungantwort (im Frequenzbereich) vornehmen um so die Aliasingeffekte zu verringern. Viele Grüße, Martin L.
Hallo Gast, hast Du es geschafft die Übertragungsfunktion von der 2. Variante der PID-Schaltung zu berechnen? LG Gast2
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.