Die Geschwindigkeit eines Autos hängt von Luftwiderstand und Rolreibung ab. Das ganze wird durch folgende DGL beschrieben: http://www.arstechnica.de/auto/rolltest/dgl01.gif Irgendwo geht mir der ganze Gedankengang noch nicht ganz auf: Nehmen wir an v=0, dann verschwindet zwar der Luftwiderstand aber die Rollreibung ist noch verhanden. Das bedeutet dann, dass dv/dt nicht null ist und sich das Auto somit wegen der Rollreibung zu bewegen beginnt... Ist wohl eher nicht so! Jetzt gibt's zwei Möglichkeiten: 1. obenstehende DGL ist falsch 2. ich kappiere etwas nicht Ich finde die Geschwindigkeit sollte auch noch in irgendeiner Form in den Rollwiderstand hineinfliessen. Zum Beispiel proportional. Dann wäre dv/dt=0 wenn v=0 ist.
Äh und wie ist das mit der Haftreibung? Bei v=0 bist du ausserhalb der Randbedingungen des obigen Modells.
Die Gleichung gilt nur für v>0. Damit sie auch für v=0 und v<0 richtig ist, müsste man die rechte Seite noch mit sgn(v) multiplizieren, denn auch der Luftwiderstand muss beim Rückwärtsfahren sein Vorzeichen ändern. > Ich finde die Geschwindigkeit sollte auch noch in irgendeiner Form in > den Rollwiderstand hineinfliessen. Zum Beispiel proportional. Der Rollwiderstand ist sicher nicht ganz unabhängig von der Geschwindigkeit, aber eher konstant, als zur Geschwindigkeit proportional.
>Äh und wie ist das mit der Haftreibung? Also nehmen wir an das Auto steht still, dann ist m*dv/dt=-F_Haftreibung Somit besteht aber irgendwie noch immer das gleich Problem, dass dv/dt ist nicht gleich null wenn v=0. Das bedeutet wiederum Auto fängt sich an zu bewegen infolge der Haftreibung... boah, ich steh im moment ziemlich auf dem Schlauch. >Bei v=0 bist du ausserhalb der Randbedingungen des obigen Modells. Ich such ein allegemeines Modell, dass von stillstand bis zu endgeschwindigkeit gilt. Welche Koefizienten (Haft,Roll) wann verwendet werden ist mir ziemlcih egal, mir geht es nur ums Prinzip, so dass isch das Auto nicht mehr infolge der Haftreibung in Bewgung setzt! Wenn man annimmt dass die Haftreibung proportional zu v ist, dann ist dv/dt=0 wenn v=0. Somit ginge es mir endlich auf im Kopf.
Hallo, yalu hat recht, die Richtung der Rollwiderstandskraft steuert um, wenn die Geschwindigkeit negativ ist. Bei Geschwindigkeit null ist die Kraft auch null. Diese 3 Fälle müssen per Fallunterscheidung modelliert werden. Die Darstellung in einer geschlossenen DGL geht nur mit einer Signum Funktion, die implizit eigentlich bereits eine Fallunterscheidung darstellt für einen numerischen Integrator. Das ist aber eben noch nicht ganz korrekt, weil das Totband der Haftreibung in den Lagern des Rades vernachlässigt wird, bei dem die Widerstandskraft größer wird und das Rad anhält. Hier ist eine Aufteilung in 5 Fälle notwendig: v >> 0, v > 0, v == 0, v < 0, v << 0 Eine Modellierung mit einer einzigen DGL funktioniert nur, solange sich das Fahrzeug mit positiver Geschwindigkeit im Rollreibungsbereich bewegt. Grüße, Peter
Angehängte Dateien:
-

gummireib.gif
11 KB
{kind=link}
{kind=link}
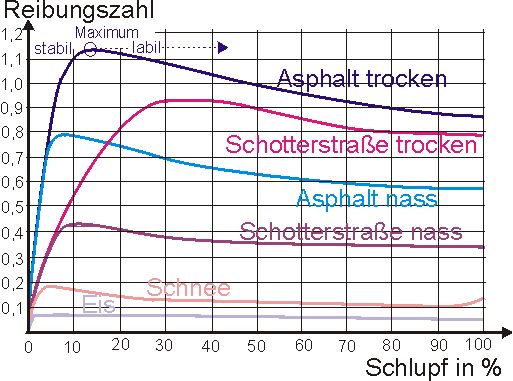
k_roll ist vom Schlupf abhängig, also der Geschwindigkeitsdifferenz zwischen Rad und Unterlage. Bei null Schlupf (wie es im Stand der Fall ist), ist auch k_roll null. Somit stimmt die Gleichung. Das Verhalten von k_roll ist qualitativ aus der angehängten Graphik ersichtlich.
>Bei null Schlupf (wie es im Stand der Fall ist)...
Dann wäre k_roll aber auch während der Fahrt immer 0 - wenn der Reifen
nicht gerade durchdreht :-)
Das ist ja der Witz an der Sache. Der Reifen dreht immer ein klein wenig durch.
Altes Problem, neuer Thread? Tut das Not? Beitrag "DC Motor simulieren" Nochmal: Der Rollwiderstand ist sgn(v) * f(von vielen Dingen) Was fällt auf? sgn(v) ist für v == 0 NICHT definiert, folglich braucht es eine Modellumschaltung, um das einigermaßen korrekt handzuhaben. Wenn v == 0, dann ist der Betrag des Rollwiderstands gleich der angreifenden Kraft, solange diese kleiner als die Haftreibung ist. Wenn die angreifende Kraft größer als die Haftreibung wird, braucht es wieder eine Modellumschaltung, weil dann die im anderen thread genannten Effekte auftreten.
@Ralf Schwarz >Das ist ja der Witz an der Sache. Der Reifen dreht immer ein klein wenig >durch. Sorry, hab jetzt nicht genau gelesen. (würde auch nicht helfen) Wenn jemand sagt: Rollwiderstand und Schlupf sind korreliert, evtl. sogar proportional zueinander, dann bezweifel ich das sehr, sehr stark.
> Wenn jemand sagt: Rollwiderstand und Schlupf sind korreliert [...] dann > bezweifel ich das sehr, sehr stark. Ist auch nicht so offensichtlich. Hab mir das auch nicht so gut vorstellen können, bis ich mich für eine Semesterarbeit mal mit einer Antriebsschlupf-Regelung befasst habe. Das ist halt generell ein wenig das Problem von uns Elektrotechnikern. Wir kennen knapp die Formel F=m*a und denken dann, dass wir jetzt auch Maschinenbauer sind und alles modellieren können.
@Ralf Schwarz >Ist auch nicht so offensichtlich. Hab mir das auch nicht so gut >vorstellen können, bis ich mich für eine Semesterarbeit mal mit einer >Antriebsschlupf-Regelung befasst habe. >Das ist halt generell ein wenig das Problem von uns Elektrotechnikern. >Wir kennen knapp die Formel F=m*a und denken dann, dass wir jetzt auch >Maschinenbauer sind und alles modellieren können. Also ich würde mal behaupten: Schlupf und Rollwiderstand haben sehr wenig miteinander zu tun. Gut, bei Geschwindigkeit Null sind beide auch Null. Beispiel Antriebsachse und nicht angetriebene Achse beim Auto. Der Schlupf tritt doch vorwiegend an der Antriebsachse auf. Rollwiderstand ist aber bei gleicher Gewichtsverteilung in etwa gleich bei Antriebs-und Nichtsantriebsachse/Rädern. Wie wäre denn deiner Meinung nach die mathematische Beziehung zwischen Rollwiderstand und Schlupf genau?
> Also ich würde mal behaupten: Schlupf und Rollwiderstand haben sehr > wenig miteinander zu tun. Gut, bei Geschwindigkeit Null sind beide auch > Null. Ja klar, sorry. Big mistake. Aber Schlupf und Reibhaftung schon.
>Ja klar, sorry. Big mistake. Aber Schlupf und Reibhaftung schon.
Hier ging es aber vorwiegend um Rollwiderstand.
Und eigentlich sagt man eher Haftreibung, jedenfalls in Deutschland.
Schlupf und Haftreibung sind selbstverständlich korreliert, auch wenn
die Beziehung sicher recht kompliziert ist und noch andere Faktoren
eingehen werden, u.a. die Verformung der Materialien usw.
Rollwiderstand und Schlupf korrelieren definitiv. Pauschal kann man grob sagen, dass je größer der Schlupf, desto größer der Widerstandskoeffizent. Im speziellen handelt es sich bei der Reibung von Gummi um Mischreibung, die sehr komplex ist und von vielen Einflussfaktoren abhängt (zum Beispiel Materialpaarung, Radlast, Temperatur,...). Kurz zum Beweis der Abhängigkeit des Rollreibungskoeffizients vom Schlupf: Die Antriebsleistung, die an das Rad abgegeben wird sei P_mech,An = M * omega_1 Die Leistung, die sozusagen über den Reifen auf die Straße übertragen wird, ist P_mech,Ab = F * v mit F = M * r_S und v=omega_0/r_dyn für reines Rollen, d.h wenn das Rad ohne Schlupf abrollen würde wie ein Zahnrad auf einer Zahnstange. r_dyn ist der dynamische Reifenradius (der Radius, den man berechnet, wenn man den Weg misst, den ein Rad zurücklegt bei einer vollen Umdrehung und das durch 2 * pi teilt). r_S is der Abstand von der Drehachse zur tangentialen Längsersatzkraft. r_dyn ist im allgemeinen ungleich r_S, weil der Reifen im Latsch abplattet, d.h. r_dyn > r_S. P_mech,Ab ergibt sich nach Einsetzen also zu P_mech,Ab = M omega_0 r_S/r_dyn. Weiter wird die Schlupfdefinition s = (omega_1-omega_0)/omega_0; omega_0 für reines Rollen. Daraus folgen zwei Erkenntnisse: 1) Annahme: Der Reifen ist unendlich steif und verformt sich nicht -> r_S = r_dyn, z.B Metallwalze oder Holzrad. Mit der Schlupfdefinition eingesetz folgt => P_mech,An = M * omega_1 = M omega0 (1+s) P_mech,Ab = M omega_0 1 Man sieht nun, irgendwo verschwindet also Leistung. Wo geht sie hin? Das ist die Rollreibung! Die Leistungsbilanz schaut nämlich so aus: P_mech,An = P_mech,Ab + P_v,R mit P_v,R Verlustleistung durch Rollwiderstand. Die Verlustleistung hängt also von der Fahrgeschwindigkeit und dem Schlupf ab. 2) Reifen sei nicht ideal steif. => dann kommt noch ein Anteil durch die Arbeit hinzu, die aufgewendet werden muss, um den Reifen vom Latscheinlauf bis zum -auslauf zu verformen. P_mech,An = M * omega_1 = M omega0 (1+s) P_mech,Ab = M omega_0 r_S/r_dyn Die Rollreibung hängt also auch von der Reifensteifigkeit, der Reifendämpfumg und der Radlast ab. Je steifer der Reifen, desto geringer der Rollwiderstand. Je größer die Reifendämpfumg, desto größer der Rollwiderstand. Je größer die Radlast, desto größer der Rollwiderstand. Je größer der Schlupf, desto größer der Rollwiderstand. Ich hoffe, ich konnte mit dieser Erklärung etwas Licht ins Dunkel bringen und habe sie bewusst einfach und anschaulich gehalten statt 100% formal korrekt und dafür komplizierter. Viele Grüße aus dem Motorsport ;-)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.