Hallo, ich habe wieder mal ein Problem oder eher eine Verständnissfrage, ich habe vor mit einen Gal die Schrittfolge eines Steppers vorzugeben. Das Problem ist das der Stepper nur ca. 7 Umdrehungen in 10 Sek. machen soll. Da wollte ich gerne die mit Hilfe des GAL die Drehzahl regulieren. Mein Problem ist, wenn ich an PIN 1 der CLK Eingang ein Rechtecksignal anlege, schaltet der GAL auch nur in diesem Moment wo mein CLK Eingang "High" ist ein Ausgang? Könnte das funktionieren? Mfg
Hi Irgedwie hast du Probleme mit dem Verständnis einer Schrittmotoransteuerung. Die Steuerung eines Schrittmotors erfolgt durch eine bestimmte Abfolge der Bestromung der Spulen. Die Drehzahl resultiert aus der Frequenz dieser Zustandsänderungen. Wenn du schon einen GAL verwenden willst, dann lass den die Bitmuster für den Treiber erzeugen und steuere das Ganze mit einer entsprechend niedrigen Frequenz. Mit einfachen Abschalten von Ausgängen kannst du die Drehzahl nicht beeinflussen. MfG Spess
Hey Spess, die Abfolge der Bestromung der Spulen ist mir verständlich. Aber auf Grund der langsamen Drehzahl die haben möchte muß ich die Logik bremsen. Da der GAL die Logik sehr schnell schaten würde, wenn ich ein Gleichspannung anlege. Aber wenn ich den GAL statt mit einer Gleichspannung sondern mit einer Rechteckspannung mit z.B. 1Hz versorge müßte es doch funktionieren? Aber welche Aufgabe hat er CLK Eingang am AL?
Du hast das Prinzip des Schrittmotors bzw. das Konzept der Ansteuerung überhaupt nicht verstanden. Bitte besorg' dir ein gutes Buch zu dem Thema oder les' dir die diversen Beiträge dazu im Internet durch. Eine gute Seite zu dem Thema ist z.B.: http://www.roboternetz.de/wissen/index.php/Schrittmotoren
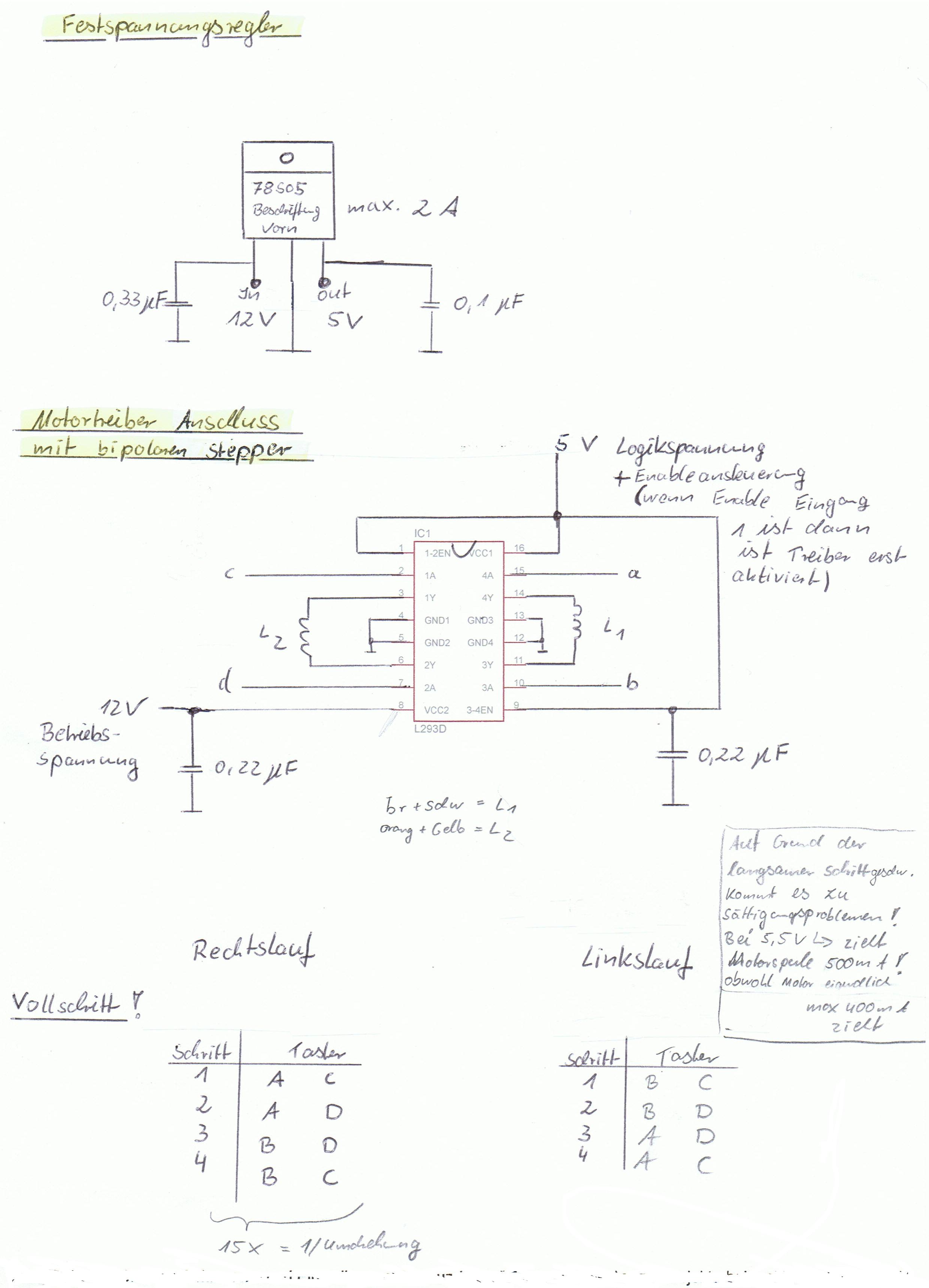
Hey Kobaltchlorid, ich hatte mich schon viel belesen über Stepper, ich habe auch schon die ersten Versuche gamacht. Ich habe im Anhang mal den Schaltungsaufbau eingefügt. Die Ansteuerung der Eingänge a,b,c,d hatte ich mit Tastern vorgenommen und der Motor drehte sich. Was ich aber absolute nicht weiß wie ich das realiesieren soll ist das Punkt wie ich die logik bremsen soll?
Hi Ich habe selbst noch nichts mit GALs gemacht. Wenn ich mein GAL-Buch richtig interpretiere, dient der Clock-Eingang der Datenübernahme wenn die Macrocell als Register konfiguriert ist. Meinesachtens müsstest du mit dem GAL einen Zustandsautomaten realisieren, der mit jedem CLK-Impuls weitergeschaltet wird. MfG Spess
da müßte es ja so funktionieren, ich gebe an Vcc die Versorgungsspannung des GALs und an CLK lege ich eine 1Hz Rechtecksignal an. Da müßte der GAL ja theortisch jede 0,1 Sekunde eine Spule des Steppers bestromen. ODER???
>> ich hatte mich schon viel belesen über Stepper Welches Kapitel hast du ausgelassen? > Da müßte der GAL ja theortisch jede 0,1 Sekunde > eine Spule des Steppers bestromen. Ein Schrittmotor ist ohne Strom momentenlos. Oder schlimmer: er kann zurückrasten. Dann hast du Schrittverluste.
Das ist mir bewußt, das er in dem Moment wo keine Spule bestromt ist der Motor momentlos ist... Das hilft mir jetzt aber auch nicht weiter
Ich habe den Eindruck, daß hier jemand wieder pitschologische Provokationen prüfen möchte. @Beginner: nimm einen Gleichstrommotor.
> Das hilft mir jetzt aber auch nicht weiter Ich vermute, dein Problem liegt in dem eingerahmten Kommentar, dass der Strom durch den Motor zu hoch sei? Mir scheint allerdings, du verwechselst Ursache und Wirkung: Es ist nicht so, dass der Motor eigentlich nur 400mA ziehen soll (laut Datenblatt) und trotzdem irgendwie 500mA fließen. Umgekehrt wird ein Zopf daraus: auf Dauer kann der Motor nur 400mA ab. Und DU bist dafür verantwortlich, dass der nicht mehr bekommt. Dafür gibt es jetzt mehrere Möglichkeiten: 1) niedrige Versorgungsspannung 2) Vorwiderstand 3) Stromsteuerung mit PWM 4) Stromregelung mit PWM Du willst offenbar sowas wie (3) machen: Die Spannung kurz anlegen, dann wieder ausschalten. Dann wieder an, wieder aus... Dies sollte aber unabhängig vom aktuellen Schritt mit einer Frequenz um 10kHz passieren. Schau dir mal die Datenblätter und APP-Notes zu anderen Schrittmotor-Treibern an (L297/298). Denn der L293 ist kein Schrittmotor-Treiber, sondern ein ordinärer Leistungsschalter. Du kannst nicht mal vernünftig einen Strommesswiderstand anschließen. EDIT: @ Gast (Gast) > Ich habe den Eindruck, daß hier jemand wieder pitschologische > Provokationen prüfen möchte. Was ist pitschologisch und wer ist jemand? ;-)
Das ist doch mal eine Aussage... Der Motor ist eigendlich mit einer Betriebsspannung von 12V angegeben. auf Grund der zu hohen Spulenströme bin ich auf 5V gegangen. Aber die 500mA zieht er ja nur wenn er ganz langsam bestromt wird, wird der Motor aber schneller bestromt kommt es ja nicht zu den Sätigungsproblemen somit sinkt auch der Spulenstrom... Mein prolem ist ja eigendlich das, das ich den Motor nur mit ca. 1 Umdrehung je Sekunde laufen lassen will und das über den GAL realiesieren will...
Hi
>Das hilft mir jetzt aber auch nicht weiter
Dein Hauptproblem ist, das deim Motor eigentlich nicht für einen Betrieb
mit konstanter Spannung gedacht ist. Wie ich dir in deinem anderen
Thread schon geschrieben habe, werden für solche Motoren Treiber mit
Stromreglung benutzt. Mit deiner Kombination GAL-Treiber-Motor wirst du
nicht glücklich werden. Bei Pollin gibt es Schrittmotoren mit höherem
Strangwiderstand, bzw. Motoren mit Treiberplatine aus Scannern, bei
denen Motor und Treiber zusammenpassen.
MfG Spess
Ich wollt aber gern diesen Motor verwenden, würde sich der Motortreiber L297 bzw. L298 dann nicht besser eignen?
> Mein Problem ist, wenn ich an PIN 1 der CLK Eingang ein Rechtecksignal > anlege, schaltet der GAL auch nur in diesem Moment wo mein CLK Eingang > "High" ist ein Ausgang? > Könnte das funktionieren? kannst doch teiler programmieren... die kapazität eines GAL ist natürlich sehr begrenzt, CPLD hätte da mehr möglichkeiten.
Hi Nicht 'L297 bzw. L298' sondern 'L297 und L298'. Meine letzte Steuerung habe ich mit dem L6219 gemacht. MfG Spess
Spess, hast du da mal bitte nen Schaltplan das ich mich rein denken kann? Und warum eigendlich L297 UND L298? Was würdest du empfehlen?
> Und warum eigendlich L297 UND L298? Würdest du BITTE mal diese Seite ansehen: http://www.roboternetz.de/wissen/index.php/Schrittmotoren Da ist auch die Schaltung mit L297 und L298 beschrieben! Und lies' dir BITTE auch alles andere auf dieser Seite durch. NACHHER kannst du immer noch Fragen stellen, wenn dir immer noch etwas unklar sein sollte.
> Der Motor ist eigendlich mit einer Betriebsspannung von 12V angegeben. Der Motor ist eigentlich mit einem Strom von 400mA angegeben. Schrittmotoren werden mit einem Nennstrom verkauft. Eine Spannung stellt sich da eher zufällig ein (und ist zudem noch temperaturabhängig). > Mein prolem ist ja eigendlich das, das ich den Motor nur mit ca. 1 > Umdrehung je Sekunde laufen lassen will und das über den GAL > realiesieren will... Nein, dein Problem ist, dass du derzeit die Schrittfrequenzerzeugung und die Spulenansteuerung als eine Einheit siehst. Trotzdem: Wieviele Schritte braucht dein Motor für eine Umdrehung? Nehmen wir z.B. 72. Eine Umdrehung pro Sekunde heißt, dass der Motor dann pro Sekunde 72 Schritte ausführen muß. Also muß zuerst eine Frequenz von 72 Hz erzeugt werden. Mit dieser Frequenz wird dann (mit Takt/Richtung) über den Schrittsequencer die Treiberstufe angesteuert. Daran hängt die Endstufe (evtl. mit Stromregelung) und dahinter der Motor. Takterzeugung --> Schritterzeugung --> Treiber --> Endstufe -- > Motor
Da versuche ich es mal mit den L297 und L298, die Schaltung hab ich gefunden werde sie morgen mal aufbauen nachdem ich bei Corad war. Ich denke mal, wenn ich an CW, CCW meinen Gal Impuls anlege, an Clock mein Rechtecksignal mit 60HZ (60 Schritte= 1 Umdrehung) müßte es doch dan funktionieren...
. > . . . nachdem ich bei Corad war. ich lache mich Schlapp ;-))) http://www.pollin.de/shop/detail.php?pg=NQ==&a=NzgwOTk4OTk=
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.