{kind=link}
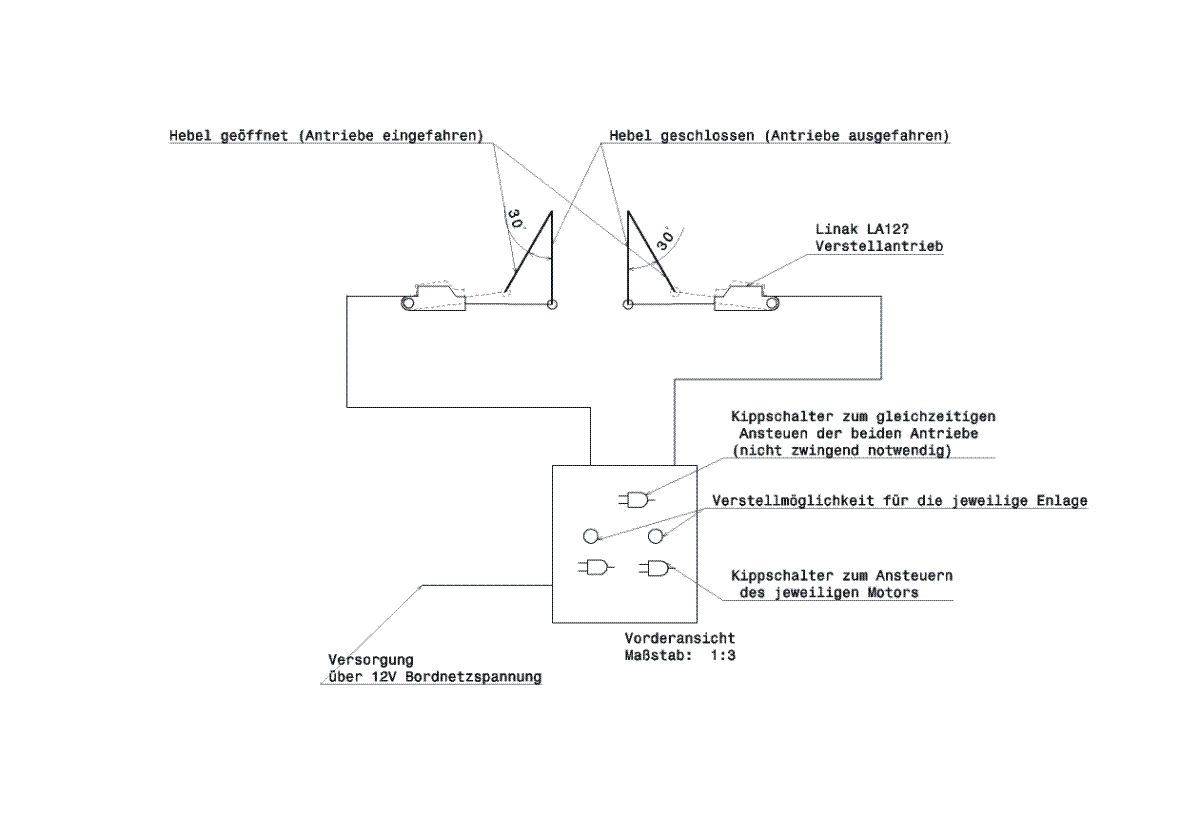
hallo zusammen, ich bin Maschinenbauer und möchte zwei Klappen elektr. Leben einhauchen. Jedoch habe ich keinerlei Erfahrung wie ich Aufgabe umsetzen kann (analog, Mikrocontroller....?) Meine Aufgabe: An einem Sonderfahrzeug (12V) sollen zwei Klappen mit einer einfachen Positionssteuerung ausgestattet werden. Bei Fa. Linak ist der Verstellantrieb LA12 erhältlich der die mech. Anforderungen erfüllt. Jedoch kann ich über die elektr. Ausstattung des Verstellantriebs keine Entscheidung treffen (Hallsensor, Potentiometer, Reed-Kontakt). In einer Voreinstellung (Bedienelement) soll eine Klappenöffung von beispielsweise 50% eingestellt werden können. Mittels eines Kippschalters soll der jeweilige Motor die vordere Endlage (voreingestellte 50%) oder die hintere Endlage anfahren. Die Positionierung muss nicht sonderlich genau funktonieren (+/-0,5mm). Zum einen sollen die zwei Motoren separat mit dem jeweiligen Kippschalter angesteuert werden. Außerdem wäre ein übergeordneter Kippschalter, der beide Motoren gleichzeitig anspricht ganz nützlich. Vielleicht könnte man einen Ultraschallsensor einbinden, der geschwindigkeitsabhängig und mit hinterlegen Kennfeld die Klappen steuert. Aber das wäre erstmal zuweit gegriffen. Ihr findet noch ein Schema(GIF-Datei) zur Verdeutlichung. Ich hab zwar irgendwann mal eine SPS (S-7) programmiert und mit C und Matlab/Simulink handtiert. Jedoch bin ich nicht in den Genuss gekommen eine Positionssteuerung zu verwirklichen. Wenn jemand weiß welche Komponenten ich benötige lasst es mich wissen. Ach noch was: ich werde dann eueren Rat dann noch öfters brauchen :-). Gruß Karl
Angehängte Dateien:
-

schema.gif
24 KB
(+/-0,5mm) klingt schon ziemlich genau, macht aber keinen Sinn, da du bislang nur den Winkel deiner Klappen angegeben hast. Musst Du mal auf eine Genauigkeit umrechnen. Ansonsten einen Absolutwinkelgeber an die Klappen. Antriebe sind meistens träge und zeigen ein lastabhängiges Verhalten (Nachlauf). Je nach Anforderung an die Genauigkeit musst du wirklich Regeln und entsprechende Parameter finden, oder du unterscheidest nur zwei Fälle (auf, zu) und stellst einen praktisch ermittelten Offset ein (z.B. = ein halbes Grad vorher abschalten). Vielleicht kann man das auch Analog aufbauen. Poti/Spannungsteiler als Winkelgeber, Trigger auf den Winkel, etwas Logik für die Ansteuerung. Oder halt Controller.
Karl Nachtmann wrote: > hallo zusammen, > > ich bin Maschinenbauer und möchte zwei Klappen elektr. Leben einhauchen. > Jedoch habe ich keinerlei Erfahrung wie ich Aufgabe umsetzen kann > (analog, Mikrocontroller....?) > > Meine Aufgabe: > An einem Sonderfahrzeug (12V) sollen zwei Klappen mit einer einfachen > Positionssteuerung ausgestattet werden. Bei Fa. Linak ist der > Verstellantrieb LA12 erhältlich der die mech. Anforderungen erfüllt. > Jedoch kann ich über die elektr. Ausstattung des Verstellantriebs keine > Entscheidung treffen (Hallsensor, Potentiometer, Reed-Kontakt). > > In einer Voreinstellung (Bedienelement) soll eine Klappenöffung von > beispielsweise 50% eingestellt werden können. Mittels eines > Kippschalters soll der jeweilige Motor die vordere Endlage > (voreingestellte 50%) oder die hintere Endlage anfahren. Die > Positionierung muss nicht sonderlich genau funktonieren (+/-0,5mm). Zum > einen sollen die zwei Motoren separat mit dem jeweiligen Kippschalter > angesteuert werden. Außerdem wäre ein übergeordneter Kippschalter, der > beide Motoren gleichzeitig anspricht ganz nützlich. Kombiniert man deine Frage nach der elektr. Ausstattung mit den Anforderungen ist das doch recht einfach: Wenn das Anfahren der gewünschten, verstellbaren Position vom Motor selbst initiert werden soll fallen die eingebauten Endlagenschalter schon mal raus, denn die sind nicht einstellbar und sorgen lediglich dafür daß sich das Ding nicht selbst kaputtfährt. Der Reedkontakt ist zwar mit Sicherheit positionierbar dafür muß man aber zum Umpositionieren unter Garantie den Antrieb aufschrauben. Der Poti hat laut Datenblatt eine Toleranz von +/- 20% auf 100mm, das ist zweifelsohne "nicht sonderlich genau" aber auch nicht +/- 0,5 mm. Es wird dir also nichts anderes übrigbleiben als den Hallsensor zu nehmen - In Kombination mit der 2mm Spindel ist das Ding zwar bestimmt saulangsam aber du kommst auf deine geforderten +/- 0,5 mm. Wenn du die Positionierung mit externen Komponenten lösen willst reicht dir selbstverständlich die einfachste Variante des LA12. > Vielleicht könnte man einen Ultraschallsensor einbinden, der > geschwindigkeitsabhängig und mit hinterlegen Kennfeld die Klappen > steuert. Aber das wäre erstmal zuweit gegriffen. > > Ihr findet noch ein Schema(GIF-Datei) zur Verdeutlichung. > > Ich hab zwar irgendwann mal eine SPS (S-7) programmiert und mit C und > Matlab/Simulink handtiert. Jedoch bin ich nicht in den Genuss gekommen > eine Positionssteuerung zu verwirklichen. Wenn jemand weiß welche > Komponenten ich benötige lasst es mich wissen. Ach noch was: ich werde > dann eueren Rat dann noch öfters brauchen :-). Einen Positionssteuerung mit Hall-Sensoren lässt sich durchaus mit einer SPS aufbauen, es müssen ja "nur" impulse gezählt werden und mit einer Zielanzahl verglichen werden. > Gruß > Karl liebe Grüße Frank
Noch ein kleiner Nachtrag weil solche "kleinen Details" gerne mal übersehen werden: Die 20% ED beim LA12 sind dir bekannt? liebe Grüße Frank
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.