Hallo, ich bin noch relativ neu hier und auf dem Gebiet der Elektronik und Sensortechnik noch recht am Anfang, habe aber mal eine Frage bei der ich hoffe dass mir hier geholfen werden kann.. Und zwar habe ich die Aufgabe bekommen die Beschleunigung und den Neigungswinkel eines Fahrzeugs in Fahrtrichtung zu bestimmen. Als erstes habe ich mir gedacht, gut bestell ich mir einfach mal einen Beschleunigungssensor. Gesagt getan. Bestellt habe ich mir einen SCA3000 von VTI Technologies der auf einem Evaluation Board sitzt und den ich über meinen µC über I2C-Bus ansteuere. Funktioniert auch alles wunderbar. Die Beschleunigungen aller 3 Achsen kann ich ohne Probleme auslesen. Nach kurzer Einarbeitung ist mir dann aufgefallen, dass ich zwar den Neigungswinkel aus den 3 Beschleunigungen bestimmen kann, allerdings nur wenn der Sensor nicht in Bewegung ist, da sonst der berechnete Winkel verfälscht wird. Andererseits kann ich auch die Beschleunigung in Fahrtrichtung bestimmen, aber nur wenn ich den Neigungswinkel weiß. Da sich das ein wenig wiederspricht hab ich noch mal genauer nachgelesen und herausgefunden, dass man deshalb ein Gyroskop mit dem Beschleunigungssensor kombiniert. Das Gyroskop soll dann den Neigungswinkel messen, während der Beschleunigungssensor diesen nicht messen kann, also bei Bewegung. Jetzt habe ich vorhin auch noch etwas über Neigungssensoren (Inclinometer) gelesen, mit denen auch der Winkel bestimmt werden kann. Deshalb meine Frage: Welcher dieser Sensoren wäre sinnvoller?? Oder ist es überhaupt sinnvoll einen der beiden mit meinem Beschleunigungssensor zu kombinieren? Ich hoffe hier kennt sich jemand ein bisschen mit dieser Problematik aus und kann mir helfen. Ich freue mich auf eure Antworten ;)
Hallo John, bei Fahrzeugen kenne ich eine Geschwindigkeitsmessung / Beschleunigungsmessung mittels Kamera die auf den Asphlat zeigt und die Bildänderung erfasst. Dann bist Du langeunabhängig bei der Beschleunigung Axel
An sowas hatte ich auch schon gedacht, allerdings soll der Sensor/ die Sensoren mit auf einer Platine integriert werden, die irgendwo im Fahrzeug (Lage ist unbekannt) sitzt, also der Installationsaufwand soll eigentlich möglichst gering sein. Deshalb kommt wahrscheinlich nur ein Beschleunigungssensor in Frage.
Das Inclinometer arbeitet doch genau wie das Accelerometer mit einer trägen Masse. Ist also kein Unterschied. Die üblichen Gyroskope können die Drehrate messen. Das System muss also mit den Accelerometern auf Absolutwert geeicht werden. Billige Piezogyros sind extremst temperatursensibel und können nur Drehimpulse messen. Gute, wie das MLX90609, halten bis zu mehreren Minuten den Winkel.
@John Coffey, willkommen bei den Zauberern. Ohne einen Geschwindigkeits sensor geht es nicht. Denn nur mit so einem lassen sich Beschleunigung und Neigung trennen.
Beschleunigungsmesser werden in Schüttel-Prüfungen als Istwert-Aufnehmer eingesetzt ( "Schütteltische" ). Es sind cm-grosse Sensoren, oft mit Gewinde zum Einschrauben. Es handelt sich prinzipiell um eine kleine Masse, die gegen eine Feder einen Quarzkristall o.ä. verbiegt, so dass auf ihm Ladungen enstehen. Die werden mit Metallfolien abgeleitet und auf einen Ladungsverstärker gegeben. Integriert man dessen Ausgangssignal 2-mal, gewinnt man ein Signal für die Geschwindigkeit bzw. für den Weg ( Auslenkung ).
>Es sind cm-grosse Sensoren, oft mit Gewinde zum Einschrauben.
heute, 15 jahre später, gibt es MEMS beschleunigungsmesser in
prinfausführung für die platinenmontage in gehäusen bis 3x3mm
ebenso mems gyros
und nach meinem wissen liefert die erste integration der beschleunigung
die geschwindigkeit, die zweite die strecke...
erstmal das hier: www. mikrocopter.de dann weiter zum thema: Ich würde 2 Beschleunigungssensoren für jede Achse nehmen, die Du mit einem Abstand von sagen wir mal 100 mm montierst. Nun kannst du den Beschleunigungswert der beiden Sensoren subtrahieren, übrig bleibt der Neigungswinkel.. Inklinometer gehen auch, aber da ist der Winkel meist begrenzt. (+/-30 Grad oder ähnlich) Gyroskope gehen natürlich auch, aber du bekommst eine Drehrate, bei der Du den Drehwinkel durch Integrieren ermitteln mußt.
"und nach meinem wissen liefert die erste integration der beschleunigung die geschwindigkeit, die zweite die strecke..." Ja, genauso hatte ich es gemeint, ich hatte nur zusammengefasst geschrieben: "Integriert man dessen Ausgangssignal 2-mal, gewinnt man ein Signal für die Geschwindigkeit bzw. für den Weg ( Auslenkung )."
>Ich würde 2 Beschleunigungssensoren für jede Achse nehmen, die Du mit >einem Abstand von sagen wir mal 100 mm montierst. Nun kannst du den >Beschleunigungswert der beiden Sensoren subtrahieren, übrig bleibt der >Neigungswinkel.. ??? Beide Sensoren messen dieselbe Beschleunigung und denselben Winkel... Subrahiert man kommt 0 raus! >Inklinometer gehen auch, aber da ist der Winkel meist begrenzt. >(+/-30 Grad oder ähnlich) Die sind doch genauso beschleunigungsempfindlich! Ich hab's nicht im Detail nachgerechnet, aber folgender Ansatz: x-Achse in Fahrtrichtung, z-Achse parallel zur Erdbeschleunigung. Ist Neigungswinkel = 0, misst x nur Beschleunigung in Fahrtrichtung, z nur Erdbeschleunigung. Wird Neigungswinkel <> 0 misst jede Achse eine Kombination aus Beschleunigung und Erdbeschleunigung (bedingt durch Neigungswinkel) mit sin() und cos() verquirrlt. MathCad sagt, die Lösung dieses Gleichungssystems mit 2 Gleichungen und 2 Unbekannten (Beschl., Winkel) sei zu groß um angezeigt zu werden... aber rein theoretisch müsste man die Gl. lösen können!
Angehängte Dateien:
-

Beschleunigung.png
11 KB
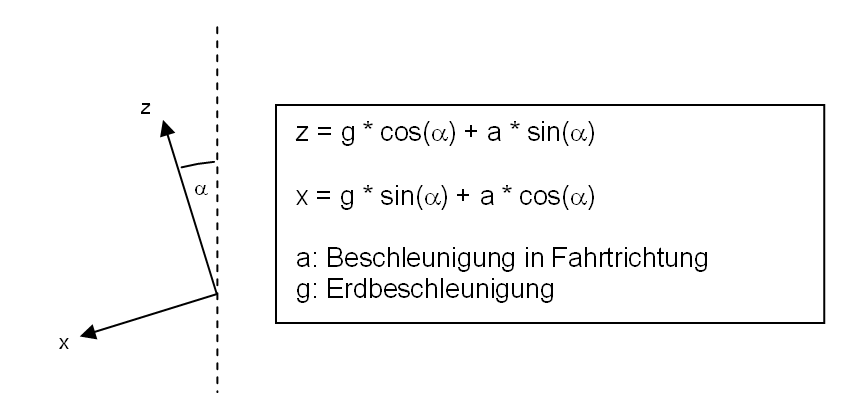
So in etwa: Gleichungssystem mit 2 Gleichungen und 2 Unbekannten (Beschleunigung, Neigungswinkel). Auflösen könnte vielleicht etwas schwierig werden... ;-) Vielleicht kann man sin und cos durch Polynome annähern...
ich hatte schon mal nen thread geöffnet, in dem ich nach "schnellen sin, cos, arcsin, arccos" fragte (bibliothek, cordic, und reihenetwicklung zu langsam, und tabelle zu gross) kennt hier wer noch einen kleinen schnellen algorhitmus um diese funktionen anzunähern?
Zu bedenken ist, dass ein Gegenstand in Ruhe(dazu gehört auch mit einer konstanten Geschwindigkeit fortbewegen) keine Beschleunigung erfährt. Daher wäre es besser einen seperaten Sensor für die Neigung zu nehmen, da die Beschleunigugnsphasen beim Auto ehr kurz sind oder ziemlich niedrig sind.
zu... innerhalb von 0 bis 3 Degree kannst du sin(x)=tan(x)=x verwenden ansonsten bist du wohl oder übel auf Tabellen oder die Reihenentwicklung beschränkt.
@Stefan (Gast): Das "Rausrechnen" klappt nur dann, wenn die Beschleunigung nur in einer Achse wirkt. Bei einem Fahrzeug, das sich um mehrere Achsen gleichzeitig bewegen kann und dazu nicht unbedingt geradeaus fährt klappt das nicht. Es ist eine Erfassung von Beschleunigungskräften und Drehraten notwendig. @Stefan Kunz (Gast): In Schwerelosigkeit vielleicht, auf der Erde hat man aber die leidige Erdbeschleunigung. Selbst wenn man einen Beschleunigungssensor verwendet der nur die Änderung der Beschleunigung misst (Funktionsprinzip Geophon) wird das nichts, da auch dann Zentripetalkraft nicht von Beschleunigung unterschieden werden kann. Wenn es mit ein Bischen rechnen getan wäre, dann würden inertiale Navigationssysteme schon lange keine Gyros mehr verwenden, da die inherent driften und viel Aufwand machen.
@Guido Körper vielleicht hab ich mich ein wenig falsch ausgedrückt. Es ging darum, dass der Winkel des Fahrzeuges mit hilfe der Beschleunigungen berechnet werden sollte. Und dies geht nun mal nicht so einfach, aus den Gründen die du genannt hast. Zur Zentripetalkraft(^^ bin mal erfreut das einer den korrekten ausdruckt benutzt) auf der erde ist zu sagen, dass das keine Rolle spielt. Wenn du den Sensor einfach irgendwo hinstellst, wird dieser keine Beschleunigung messen, da der Sensor auch keine Veränderung seiner Position sieht. In der Universität haben wir mal eine kleine Tauchdrohne damit ausgerüstet, um deren Position zu bestimmen, an sich gutes Prinzip, leider war der der Sensor zu ungenau.
@Stefan Kunz (Gast) Im Stillstand (gegenüber der Erdoberfläche) mißt der Sensor eben doch eine Beschleunigung (siehe auch Datenblatt/App-Notes der Sensoren). Und zwar in Höhe von 1 g. Global betrachtet ändert der Sensor ja auch seine Position, z.B. durch Erdrotation usw. Diese Beschleunigung ist auch immer Bestandteil der Messung, je nach Lage des Sensors halt verteilt auf die 3 Achsen. Problematisch ist nur das "Rausrechnen" dieser statischen Komponente.
Ich meinte nicht die Zentripetalkraft durch die Erddrehung, sondern durch die Tatsache, dass sich der Sensor nicht immer im Drehpunkt einer Bewegung des Fahrzeuges befindet. Die genaue Messung der Bewegungs- und Raumdaten mit inertialen Methoden ist nicht einfach und immer einer gewissen Drift unterworfen. Die Kompensation dieser Drift war es ja, die den Start der ersten Ariane 5 ein kleines Bischen versaut hat: http://www.youtube.com/watch?v=wXyHNKU1amk
Nachtrag: Die fehlerhafte Software zur Kompensation der Drift war das Problem.
Gibs eigentlich die möglichkeit mit die Ausgange vom Sensor jeweils 2 led´s pro achse zu versorgen so das wenn ich den rechts Schwenke eine led angeht und wenn ich nach Links eine andere led angeht, das gleiche für die 2 achse ?
>Und zwar habe ich die Aufgabe bekommen die Beschleunigung und den >Neigungswinkel eines Fahrzeugs in Fahrtrichtung zu bestimmen. Eine Messung über Beschleunigungen ist nicht möglich. Mathematisch schon, numerisch nicht, weil man dazu vektoriell so hoch auflösen müsste, dass man auch bereits eine geringe Abweichung in der z-Achsbeschleunigung von der Erdbeschleunigung erfassen kann. Das ist eigentlich mit keinem bezahlbaren Sensor möglich. Ich habe genau dieses Problem in einem selbstbalancierendem 2-Rad Fahrzeug (Segway). Der einzig praktikable Weg geht über die zweifache Differentiation des Fahrwegs. Diesen kann man ja einfach an den Rädern abgreifen. Die Masse und die Beschleunigung des Fahrzeugs kennt man jetzt (also die Masse kannte man schon vorher). Zusammen mit einer Drehmomentmessung im Antriebsstrang und der Bewegungsdifferentialgleichung ist es kein Problem, den Neigungswinkel der Fahrbahn zu bestimmen. Dafür braucht man keine einziges Accelerometer. Grüße, Peter
@Peter: Wie misst man denn "ganz einfach" das Drehmoment?
In meinem Fall war das Messen (oder genauer gesagt das Berechnen) des Drehmoments nicht so schwierig, ich hab in dem Fahrzeug zwei Brushlessmotoren mit Umrichtern, da entspricht das Moment einfach dem Strom in der q-Achse der Maschine. Als Antriebsmoment rechne ich den Mittelwert der beiden Maschinen. Bei einem echten Auto (KFZ) steht das Motormoment in der Regel auf einem der Bussysteme zur Verfügung. Wenn nicht, kann man es auch über das Motorkennfeld ausrechnen, dazu bräuchte man beispielsweise die Drehzahl und einen Abgriff der Einspritzzeiten. Das ganze muss man dann nur noch einmal auf ebener Strecke mit einem Accelerometer kalibrieren und schon hat man wirklich gute Werte für das Drehmoment. Aber aus eigener Erfahrung kann ich sagen, dass das Verfahren mit alleiniger Auswertung der 3-achsigen Beschleunigung und Drehraten in der Praxis nicht funktioniert. Es ist extrem anspruchsvoll ein ungebremstes Herunterrollen auf einer schiefen Fahrbahn von einfachem Stillstand auf der Ebene unterscheiden zu können, da sich die beiden Fälle ausschließlich um einem marginalen Betrag in der z-Achs Beschleunigung unterscheiden, den man gegenüber der reinen Erdbeschleunigung herausrechnen können muss. Und so wie diese Sensoren rauschen und über die Temperatur driften, kann man das einfach nur vergessen. Grüße, Peter
Buchtip zu dem Thema: Wendel, Jan Integrierte Navigationssysteme Sensordatenfusion, GPS und Inertiale Navigation Die bisher beste Abhandlung zu dem Thema, welche ich gelesen habe. Auszugsweise auch bei Google-Books zu lesen. Das "beste" bezieht sich dabei auf die Verständlichkeit im Vergleich zu anderer Literatur. Dennoch geht es in dem Buch recht mathematisch zu. Es werden auch verschiedene Sensorsysteme und die zeitlich zu erwartende Fehlerentwicklung betrachtet. Als Schlagwort für gängige Suchmaschinen kann man auch mal Strapdown-Algorithmus verwenden. Gruß Jan.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.