Hallo, ich habe hier einen Motor, 12V, Leerlauf ca. 2A, Vollast > 10A. Der soll mit einer PWM betreiben werden. Wenn die PWM grade an ist soll ein Kontakt auf 0V und der andere auf 12V liegen, klar. Aber was ist nun wenn die PWM aus ist? Der eine bleibt auf 0V und der andere? Inner Luft hängen lassen oder auch auf 0V ziehen?
Ein Pol des Motors liegt an +12V, der andere wird über einen FET auf GND geschaltet. Parallel zum Motor liegt eine Freilaufdiode (z. B. FESB16GT) mit der Anode gegen +12V. Otto
Also hängt dann ein Pol inner Luft? Halt nur mit der Diode gegen 12V.
Ja - es sei denn, Du möchtest auch Richtungsumkehr und/oder Kurzschlussbremsung durchführen. Dann verwendest Du besser ein H-Brücken Relais, von welchem der GND Anschluß mit PWM beaufschlagt wird. Otto
>Anode gegen +12V
und schwups, wars das. Der perfekte Mord für die Diode, würde ich sagen.
Kathode an +12V (in Sperrrichtung) schalten.
Angehängte Dateien:
-

Endstufe4.sch.png
81 KB
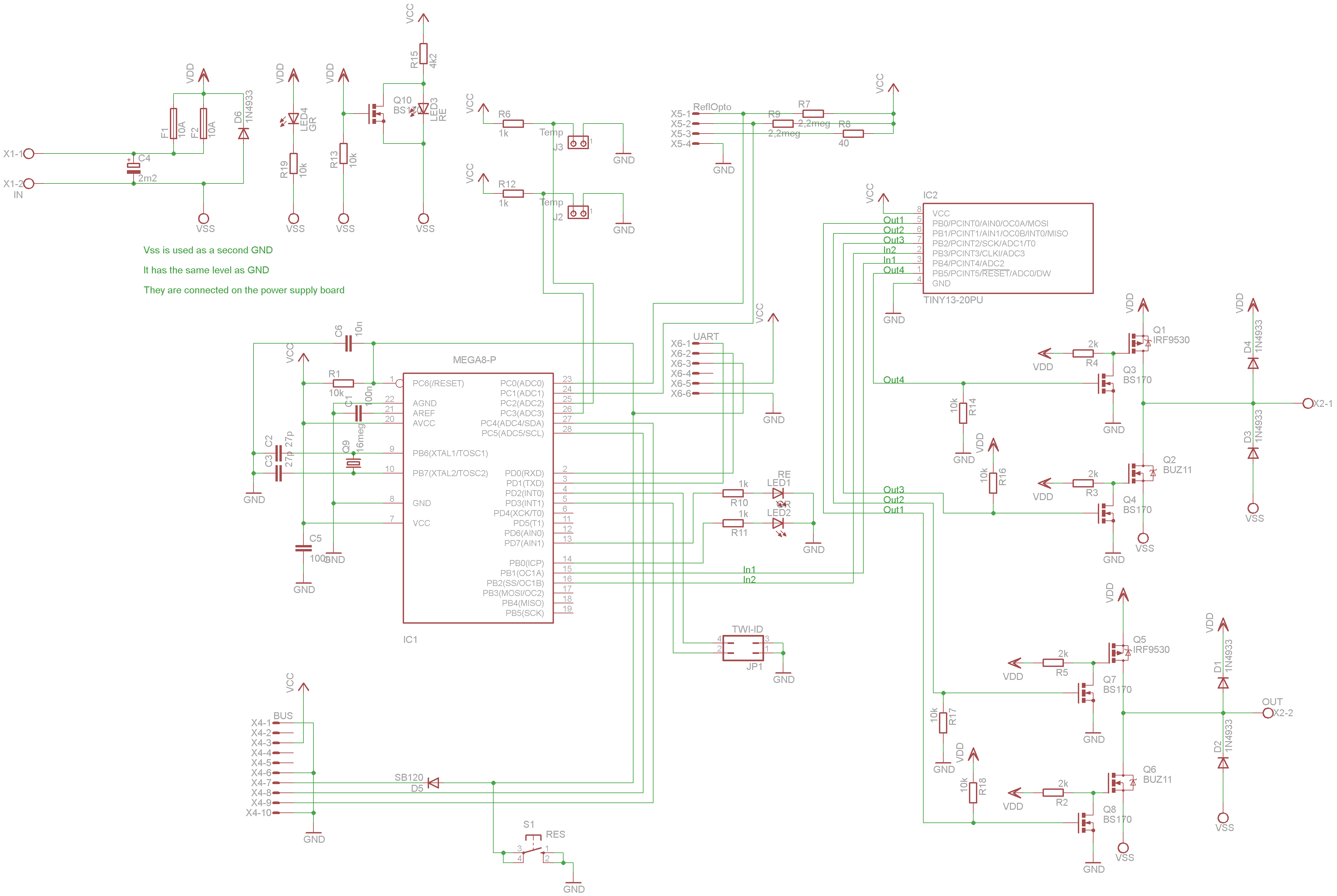
Also umdrehen will ich, hatte die Frage nur etwas vereinfacht ;) Habe es aber mit 4 Mosfets, ohne Relais gemacht. Im Anhang ist die Schaltung.
>Anode gegen +12V > und schwups, wars das. Der perfekte Mord für die Diode, würde ich sagen. > Kathode an +12V (in Sperrrichtung) schalten. MIST ! Otto
>Dateianhang: Endstufe4.sch.png (81,4 KB, 8 Downloads)
Die Dioden D1..D4 kannst du dir sparen. Die interen (im FET) reichen
aus.
PS: Die Ansteuerung der FETs geht so, aber besonders hoch sollte die
PWM-Frequenz da nicht sein. einige 100Hz könnten gehen..
@Otto
>Mist !
Was soll denn das heißen?
...Das du einen Fehler gemacht hast?
...Oder unterstellst du eine Falschbehauptung meinerseits?
Werd mal konkret.
Jo danke für den Tipp, besser wäre es, wenn ich jetzt noch verstehen würde warum. Also die Dioden: Mir ist klar, dass in den FETs auch welche drin sind, aber die werden dann doch nur unnötig warm oder? Ist ja nicht grade wenig Leistung die da verbraten wird. Und warum sollte die Frequenz nicht zu hoch sein? Wegen der Rise/Fall Time der Mosfets und der so mehr entstehenden Wärme?
Es soll heissen, dass ich einen Fehler gemacht habe.... Entschuldigung Otto
>Also die Dioden: Mir ist klar, dass in den FETs auch welche drin sind, >aber die werden dann doch nur unnötig warm oder? Ist ja nicht grade >wenig Leistung die da verbraten wird. Die internen Dioden eines FETs sind immer genauso stark wie der FET selbst. >Ist ja nicht grade wenig Leistung die da verbraten wird. SO? Wieviel soll denn das sein? >Wegen der Rise/Fall Time der Mosfets und der so mehr entstehenden Wärme? Ja. Aber nicht der FETs selbst, sondern der Ansteuerung. Die ist nur für kleinere Frequenzen geeignet.
Matthias Lipinsky schrieb: > Die internen Dioden eines FETs sind immer genauso stark wie der FET > selbst. na denn willl ich dir mal glauben > SO? Wieviel soll denn das sein? Weiß nicht, ist halt nicht wenig. Hängt eben ne etwas größere Induktivität hinter. >>Wegen der Rise/Fall Time der Mosfets und der so mehr entstehenden Wärme? > > Ja. Aber nicht der FETs selbst, sondern der Ansteuerung. Die ist nur für > kleinere Frequenzen geeignet. Was ist denn daran ungünstig oder falsch für höhere Frequenzen? Momentan steuer ich das ganze mit 600Hz PWM Frequenz an und das geht ganz gut, also die Motoren quietschen dabei fast nicht und sie haben auch nicht enorme Strom Spitzen.
@Otto
Dann ist es gut, irren ist Menschlich.
@Fabian
>Was ist denn daran ungünstig oder falsch für höhere Frequenzen?
Du hast als Verbraucher eine Spule und die verhält sich nun mal
FREQUENZABHÄNGIG. Wenn ich nicht irre nimmt der Strom mit zunehmender
Frequenz ab. Das bedeutet dann ja wohl das auch die Leistung sinken
müßte,
oder?
Bist du denn mit der Puls-Weiten-Modulation vertraut und sorgst du auch
dafür, das beide Mosfet garantiert und auch nicht kurzfristig
gleichzeitig
ein wenig leiten? Ansonsten haste eine Menge Verlustleistung unnötig zu
verheizen.
Die Dioden sollen außerdem die EMK die vom Motor reflektiert wird,
kurzschließen, bzw. auf die niederohmige Versorgung abgeleitet werden.
Da können die Dioden schon warm werden.
Bei der PWM gibt man gewöhnlich ein feste Frequenz vor und man ändert
das Impuls/Pausenverhältnis, je nach dem, was man mit der Schaltung
beabsichtigt.
Wäre gut, wenn in der Schaltung der/die Motor/en mit Wicklungen
eingezeichnet wäre/n.
> Du hast als Verbraucher eine Spule und die verhält sich nun mal > FREQUENZABHÄNGIG. Wenn ich nicht irre nimmt der Strom mit zunehmender > Frequenz ab. Das bedeutet dann ja wohl das auch die Leistung sinken > müßte, > oder? Jo, da hast Recht. > Bist du denn mit der Puls-Weiten-Modulation vertraut und sorgst du auch > dafür, das beide Mosfet garantiert und auch nicht kurzfristig > gleichzeitig > ein wenig leiten? Ansonsten haste eine Menge Verlustleistung unnötig zu > verheizen. Ich bin vertraut. Über die Frequenz habe ich mir jedoch noch nie sehr viel Gedanken gemacht. Immer nur ausprobiert was gut ist. > Die Dioden sollen außerdem die EMK die vom Motor reflektiert wird, > kurzschließen, bzw. auf die niederohmige Versorgung abgeleitet werden. > Da können die Dioden schon warm werden. Meinst du den Rückstoß durch die... öhh wie hieß das noch, eigen induzierte Spannung oder so? > Bei der PWM gibt man gewöhnlich ein feste Frequenz vor und man ändert > das Impuls/Pausenverhältnis, je nach dem, was man mit der Schaltung > beabsichtigt. Schon klar.
>Du hast als Verbraucher eine Spule und die verhält sich nun mal >FREQUENZABHÄNGIG. Wenn ich nicht irre nimmt der Strom mit zunehmender >Frequenz ab. Das bedeutet dann ja wohl das auch die Leistung sinken >müßte, >oder? Bist du Elektriker? ;-) Bei der PWM läuft das etwas anders.
@Matthias Lipinsky >Bist du Elektriker? ;-) Mindestens, aber nicht nur. >Bei der PWM läuft das etwas anders. Richtig, die Frage war ja mehr oder weniger, ob man die Frequenz beliebig verändern kann bzw. welche Frequenz für den Betrieb am geeignesten ist. Da die Frequenz gewöhnlich einmal festgelegt wird, kommt es bei PWM nur auf das Impuls/Pausenverhältnis an womit der Motor gesteuert wird. Du darfst aber gern deine eigene Meinung sachlich ausführlich hier posten sofern du da bessere Kenntnisse hast. @Fabian S. >Meinst du den Rückstoß durch die... öhh wie hieß das noch, eigen >induzierte Spannung oder so? oder so: EMK= Elektro Motorische Kraft Kommt bei jeder gleichstromdurchflossenen Induktivität vor. Für die Wahl der Frequenz würde ich das Datenblatt des Motors zu Rate ziehen oder von einem ähnlichen Motor mit vergleichbaren Daten. Ich meine mal gelesen zu haben das man selten über 200 Hz geht, erinnere mich aber nicht mehr, wo. Wenn die Kenndaten des Motors nicht per Datenblatt verfügbar sind muß man versuchen experimentel brauchbare Daten zu bekommen.
Schwups... schrieb: > Ich meine mal gelesen zu haben das man selten über 200 Hz > geht, erinnere mich aber nicht mehr, wo. Ich hätte jetzt eher gesagt >1kHz. Der Grund ist einfach: Damit der Strom möglichst gleichmäßig ist, muss die R*L Zeitkonstante der Motorwicklung größer sein als die PWM Frequenz. Ich habe mal willkürlich ein paar Datenblätter bei Bühler durchsucht, bei denen liegt die Zeitkonstante um die 1ms. Eine Frequenz von ein paar kHz ist daher empfehlenswert. Darunter läuft der Motor unrund, denn er beschleunigt im Takt der PWM Frequenz. Eine Frequenz von 1-3kHz hat aber einen Nachteil: In diesem Bereich hört man am besten. Man hört also deutlich das leiseste Pfeifen aus dem Motor. Daher verwende ich meist 8-15kHz. Je höher die Frequenz allerdings wird, desto größer werden die Verluste im Eisen durch die hochfrequenten Magnetfelder.
>Der Grund ist einfach: Damit der Strom möglichst gleichmäßig ist, muss >die R*L Zeitkonstante der Motorwicklung größer sein als die PWM >Frequenz. Das ist der Punkt zur Festlegung der Frequenz. Industrielle FUs haben eine einstellbare Frequenz von 1,2,4 und 8kHz. >Man hört also deutlich das leiseste Pfeifen aus dem Motor. Das gehört doch bei FUs dazu. Das muss fiepen ;-) >Verluste im Eisen durch die hochfrequenten Magnetfelder. Und in den FETs.
Mhhh das Fiepen in den Motoren stört mich ja nicht, viel mehr aber das, was dann aus der Schaltung kommt. Habe immer Angst, dass mir die gleich um die Ohren fliegt :( Denke mal das kommt irgendwie durch den 2,2mF Elko. Aber keine Ahnung warum. @Benedikt K.: Hab da grade auch mal nachgesehen bei Bühler. Was hast du dir denn da rausgesucht? Da steht ja nicht wirklich irgendwo ne Induktivität. Und zu beachten ist auch, dass keiner der Getriebemotoren an die Leistung kommt die meiner hat. Das hier ist der stärkste den ich gefunden habe: http://www.buehlermotor.de/C12572D40025EAF8/vwWebContentByChildsExtern/FA99D643BDE3B800C125758B0033B10E/$file/DC-Getriebemotor-1_61_050_de.pdf (mal hoffen, dass der Link funktioniert...) Beim 422 kommt die Drehzahl ganz gut hin, meiner hat jedoch glaube ich ein paar mehr Nm, 5 oder so. Edit: Noch mal eben zur Zeitkonstanten. tau=L/R wenn ich mich recht entsinne bei einer Induktivität! Aber was ist R? War das nicht der Widerstand über den L mit sich selber kurzgeschlossen ist??? Der wäre dann ja bei mir nahe unendlich :-/ Edit2: Mhh... müsste R nicht eigentlich die Diode sein, die gegen die 12V führt sein? Dürfte etwas umständlicher werden das zu berechnen ^^
Fabian S. schrieb: > Hab da grade auch mal nachgesehen bei Bühler. Was hast du dir denn da > rausgesucht? Da steht ja nicht wirklich irgendwo ne Induktivität. Hier (keine Ahnung ob und wie lange der Link geht) habe ich mir ein paar Motoren rausgegriffen: http://www.buehlermotor.de/C12572C600247071/vwContentByKey/W273RD58524WEBRDE z.B. diesen hier: http://www.buehlermotor.de/C12572D40025EAF8/vwWebContentByChildsExtern/CC25492E83E3B673C12575890040659F/$file/DC-Motor-1_13_018_de.pdf Die haben zwar "nur" 25W aber um mal grob einen Wert zu haben, reicht das. Leider geben nicht alle Hersteller dieser Werte an. Da steht unter Motorparameter der Werte Elektr. Zeitkonstante. Dieser Motor hat da einen Wert von 1,1ms. Bei den Getriebemotoren scheinen die die Werte auch nicht anzugeben. > Edit: Noch mal eben zur Zeitkonstanten. tau=L/R wenn ich mich recht > entsinne bei einer Induktivität! Ähm, ja. Das verwechsele ich immer mit R*C... > Aber was ist R? War das nicht der Widerstand über den L mit sich selber > kurzgeschlossen ist??? R ist der ohmsche Widerstand der Motorwicklung. > Der wäre dann ja bei mir nahe unendlich :-/ Wieso? Wenn L hinreichend klein ist, kommt auch wieder was kleines raus. Bei dem Motor aus obigem Datenblatt ist R=1,1Ohm und L müsste demnach 1,2mH haben, was durchaus im üblichen Bereich liegt. Stärkere Motoren haben meist weniger Windungen und daher weniger Induktivität. > Edit2: Mhh... müsste R nicht eigentlich die Diode sein, die gegen die > 12V führt sein? Dürfte etwas umständlicher werden das zu berechnen ^^ R eine Diode? Wo?
>Aber was ist R? War das nicht der Widerstand über den L mit sich selber >kurzgeschlossen ist??? Der wäre dann ja bei mir nahe unendlich :-/ Ankerinduktivität und -widerstand.
Ahhha... na denn :P Hilft mir ja nun noch weniger weiter. Naja ist auch eigentlich egal, meine eigentliche Frage ist ja geklärt. Aber etwas hätte ich da noch: Mir hat jemand gesagt, dass ich mit Hilfe eines Kondensators vom Gehäuse des Motors zur Masse EM-Felder verhindern/schwächen kann. Stimmt das und wenn ja wie groß müsste der Kondensator sein? Um der Frage vor zu beugen: Nein, das Gehäuse ist mit keinem Kontakt des Motors verbunden. Und dann noch die frage wie ich verhindern kann, dass die doch Starken Stromspitzden der Motoren nicht in die Schaltungen jagen? Auf dem Schaltplan weiter oben sieht man ja, dass ich auf der Platine schon zwei Massen genommen habe, damit kein Strom der Motoren durch den Platinen Verbinder fließt. Aber das ganze hängt ja an einem Bleiakku. Habe 4 von den Motoren, sprich da fließen schon mal so 10A gepulst. Drosselspule? Wie dimensioniert man die?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.