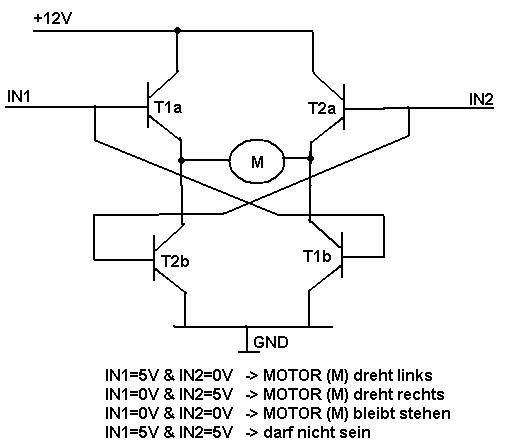
hallo ihr ich bastle gerade an einem autonomen Robotor und brauche eine schaltung für jeden motor (links und rechts) um die motoren mit einem avr steuern zu können. hab mir eine schaltung ausgedacht und diese (bitte nicht lachen) in paint aufgezeichnet. würde die schaltung funktionieren? hab ihr eine bessere idee? in1 und in2 sind eingänge M ist der Motor 1000 dank im voraus
Angehängte Dateien:
-

motorsteuerung.jpg
29 KB
Hi Christoph... Such mal hier im Forum nach H-Brücke, da wirst du sicher fündig. Deine Schaltung (ich habe nicht gelacht, sondern an meine Anfängerzeit gedacht) geht zwar in die richtige Richtung, stimmt aber noch lange nicht... Gruß... - ...HanneS...
Hallo christoph, ich schließe mich Hannes an. Das Ding wird dir um die Ohren fliegen. Wenn du dem oberen Transistor nur 5 V gibst, stellt sich am Emiter ca. 4,3 V ein. Das heißt, du hast 8V * Motorstrom Verlustleistung in den oberen Transistoren. Michael
Moin! Die Schaltung entspricht doch schon fast dem Aufbau einer H-Brücke. Bis auf das Fehlen von Emitter-Pfeilen und ein paar Widerstände... Die unteren beiden Transistoren müssten NPN-Typen sein, und die beiden oberen PNP. Und das Zusammenschalten der Basen solltest Du dir noch mal überlegen... Gruß Rahul PS: ein bißchen Grinsen musste ich schon... das mache ich aber auch, wenn ich wieder irgendwelches Zeug "verdreht" habe.
Angehängte Dateien:
-

motorschaltung.jpg
25 KB
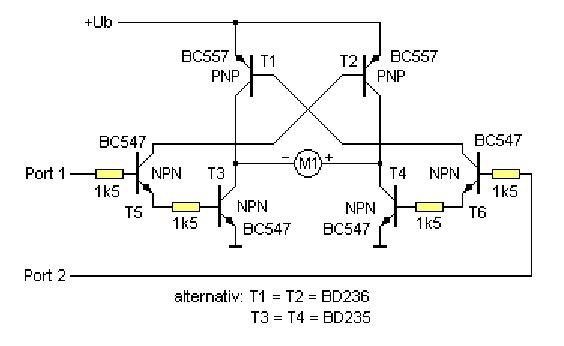
Danke leute, ich bin beim surfen auch auf diesen motortreiber L298 gestoßen, hört sich gut an, außerdem gibts den auch bei reichelt. ich hab mal vor einiger zeit eine motorschaltung gefunden, die ich sogar nachgebaut habe. die schaltung ist im anhang zu finden. was an der schaltung mist ist: der motor läuft nicht an, oder nur manchmal, aber der soll immer mit voller power anlaufen! kann ich die schaltung trotzdem nehmen, muss ich vielleicht nur andere wiederstände einbauen oder so? oder soll ich den motortreiber L298 nehmen? Danke christoph
Das ist nichts für einen Motor, sondern für ein Motörchen. Wenn der angeschlossene Motor nicht anläuft, denke ich die Betriebsspannung ist zu gering oder der angeschlossene Motor benötigt mehr als 200 bis 300 mA. Die BC 557 und 547, welche Typen sind das von der Stromverstärkung? Michael
Angehängte Dateien:
-

motorschaltung.jpg
25 KB
meine motor ist ein 12V gleichstrommotor, braucht bis zu 2,5 A, 12V und ist mit 1000 bis 4000 umdrehungen pro minute angegeben. also kein kleiner motor. dem entsprechend habe ich die schaltung auch mit den altanativ angegenbenen transistoren aufgebaut. der BD235 und BD236 sind angegeben. bei der schaltung läuft der motor trotzdem zu langsam an, der schein nicht genug strom zu bekommen, er, wenn er läuft, keine großartige kraft hat. christoph
Mess mal die Spannung über dem Motor, wenn er 100% laufen sollte Michael

pass nur auf, dass du nicht beide Ports aus Versehen auf high schaltest, dann fängt es an zu rauchen.
@ Chritoph, ich habe eben mal nach dem Datenblatt des Transistors gegoogelt. der hat eine Stromverstärkung von 25. Das bedeutet, daß du die Basisvorwiderstände so dimensionieren mußt, daß ein Strom von 2,5 A / 25 = 100mA in die Basis des einzelnen Widerstandes fließen muß. Überschlagen würde ich sagen, daß du 100 Ohm basisvorwiderstände einsetzen mußt. Michael
Angehängte Dateien:
-

motorschaltung.jpg
25 KB
super, langsam kommen wir zum ziel, heiß das, ich kann die angehangene motorschaltung verwenden? ich muss nur die basiswiederstände anders dimensionieren? aber alle gleich denke ich mal oder? wenn das so ist werde ich das wahrscheinlich noch heute, an sonsten aber morgen ausprobieren! danke euch allen
toll, ich hatte keine 100 ohm wiederstände, hab also einfach die wiederstände weg gelassen, der motor hat sich immer noch nicht so stark wie erwartet gedreht. aber daführ hat es lustig gequalmt schäm oh oh gott, ich glaube ich bestell mir nen L298 und versuch es damit. wenn das nicht klappt erschieß ich mich danke gruß christoph
Hi... Nimm lieber Relais, fallst du die Motoren micht per PWM in der Drehzahl steuern mussst. Brauchst dann 2 Relais mit je einem Wechsler und für jedes einen NPN-Transistor mit Basiswiderstand und Freilaufdiode. ...HanneS...
oder gleich die einfache "Profivariante": Pulsweitensteuerung mit einem npn Transi (oder FET) gegen Masse und Drehrichtung über ein Relais. Hat noch dazu den Vorteil dass nur ein Schaltwiderstand im Lastzweig ist. grüsse leo9
Du willst einen autonomen Roboter bauen, bei dem die Motoren immer mit voller Kraft laufen?????? Sebastian
Hi... Wer lesen kann, ist klar im Vorteil... Sorry, ich habe den "autonomen Roboter" überlesen... Dann muss es natürlich PWM sein... Gruß... ...HanneS...
Natürlich raucht es, wenn man einen Bipolaren Transistor ohne Basisvorwiderstand betreibt... Da wird er doch sehr übersteuert... Die Variante mit dem Relais hat auch den Vorateil, dass man nicht soviele Verluste über Transistor-Strecken hat, und somit weniger Leistung verbrät. Der Vorwiderstand an der Basis eines Transistor begrenzt den Strom, der in die Basis fliesst (NPN; beim PNP fliesst der Strom aus der Basis). Wenn man also mit 5V den Transistor schalten will, braucht man bei einem Basisstrom von 100mA einen Vorwiderstand von Rv=(5V-0,7V)/0,1A = 43Ohm. 39Ohm sollten auch noch gehen... Übrigens übersteuert man Transistoren auch gerne, da die Gleichstromverstärkung nur ein Richtwert ist. Die Übersteuerung gleicht dann Bauteilschwankungen aus. Gruß Rahul
ich besorge mir nochmal 100 ohm wiederstände in den nächsten tagen, löte die ein und versuch es noch einmal, wenn das nicht funktioniert bestelle ich mir bei reichelt einfach diese motortreiber L298 . die können PWM was ich für den roboter auf jedenfall benötige. melde mich wenn das funktioniert hat und fotos vom roboter gibts dann auch bald mal. danke an alle Christoph
Vielleicht solltest Du dir auch noch ein paar neue Transistoren besorgen... die Vertragen unnötige Hitze nicht besonders gut...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.