
Hallo Leute, ich weiß nicht, ob das so ganz hier reinpasst aber ich hätte da mal eine Frage zur Parktransformation: Ich verstehe nicht, wieso sich die Simulink abc-dq-Transformation und die in der Literatur zu findende derart unterscheiden, dass sin und cos in der Transformationsmatrix vertauscht sind. Ich habe probeweise nachgerechnet, indem ich die a-Phase aus einem gegebenem Raumzeiger berechnet habe und komme auf das gleiche Ergebnis wie die Literatur es vorgibt. Damit die Matrix von Simulink stimmt, müsste ich d- und q-Achse vertauschen. Oder was läuft da schief? Danke vielmals...
Angehängte Dateien:
-

AbcDq.jpg
67 KB
Ich glaube, das hat etwas damit zu tun, dass man in der Technik elektrischer Maschinen die Realachse nach oben und die Imaginärachse nach links zeichnet. Im Endeffekt musst du es einfach so schreiben, dass es auf das Koordinatensystem deiner Maschine bzw. deines Drehgebersystems passt. Grüße, Peter
Danke für deinen Beitrag, aber ich denke, das würde doch nichts an der Berechnung ändern, da die Reihenfolge gleich bleiben würde.
Angehängte Dateien:
-

AbcDq2.jpg
220 KB
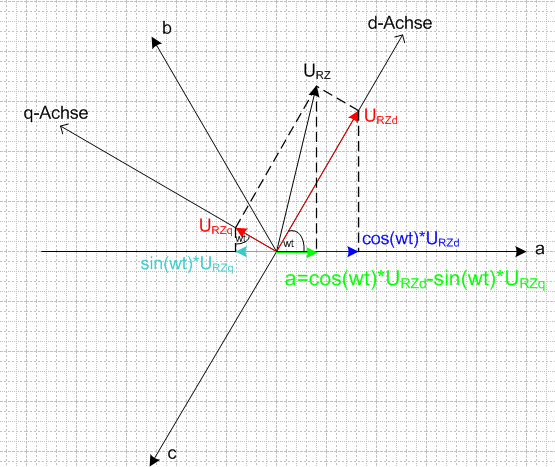
Habe nochmals meine Berechnung aufgezeichnet, Der Raumzeiger URZ ist gegeben, ich möchte aus seinen dq-Komponenten URZd und URZq die abc-Komponenten berechnen. Im Bild sieht man nur die Berechnung der a-Komponente (ist gleichzusetzen mit der alpha-Komponente). Das entspricht der 1.Zeile der Berechnungsmatrix aus der Literatur. Das dq-System rotiert mit Kreisfrequenz w. Das abc-System ist stationär.
Ich empfehle immer wieder gerne die Appilication Notes von TI, dort werden die Zusammenhänge recht gut dargestellt. In diesem Fall lohnt sich ein Blick in das folgende pdf: http://focus.ti.com/lit/an/bpra073/bpra073.pdf Grüße, Peter
Danke dir Peter, ich denke der Unterschied ist einfach, dass die Literatur ihre drei Phasen mit cosinus-Termen definiert, also: a=cos(wt), b=cos(wt-2pi/3) und c=cos(wt+2pi/3), während das in Matlab mit sinus-Termen geschieht...
Hallo nochmal, ich muss mich noch einmal korrigieren, man versteht etwas halt erst dann richtig, wenn man es zehnmal versucht zu erklären. Die Transformationen sind deshalb unterschiedlich, weil sie einen unterschiedlichen Winkel zur Berechnung heranziehen. Die Simulink-Variante verwendet den Netzwinkel, also der Winkel, den die Phase A hat. Zur Zeit t=0 wären das 0°. Die Transformation aus der Literatur verwendet den Winkel des Raumzeigers, das wären bei t=0 -90°. P.S. Hat eigentlich jemand Erfahrung mit den Linkports des TS201-EZ-Kit Lite Board von AD? Konkret soll das DSP über den Linkport Daten an ein Altera-FPGA-Board senden.
Mit dem Tigersharc habe ich noch nicht gearbeitet, aber mit zwei Sharc Prozessoren und dem 8bit Linkport. Das war relativ easy. Mit DMA und Packing kamen die 32-48 Bit Daten aus dem Speicher. Hakelig wird eine bidirektionale Kommunikation über denselben LinkPort. Sofern Du das benötigst empfehle ich Dir zwei Linkports zu nehmen, einen für RX und einen für TX. Wenn ich mich nicht irre, dann sind die Linkports bei den TS mit differentiellen Leitungen ausgestattet. Irgendwo (bei Xilinx glaube ich) gibt es auch einen VHDL Code für die Anbeinung an den Linkport. Bei den neueren Generationen der Sharcs ist der LinkPort quasi ausgestorben, dafür steigt die Anzahl der serial ports. Für ein Industrieprodukt würde ich mir nochmal überlegen ob der TigerSharc langfristig sinn macht. Hat zwar viel Floatingpoint Rechenpower (die Sharcs holen bereits stark auf) aber wenig universelle Peripherie. Gruß Michael
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.