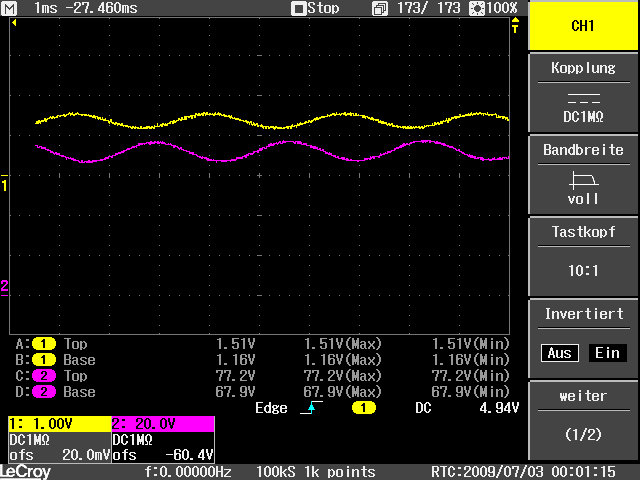
Hallo, ich versuche gerade für einen Piezomotor eine Positionsregelung aufzubauen. Die Position wird über Dehungsmesstreifen erfasst, das dort entstehende Signal (etwa 15mV) in einem INA 326 Instrumentenverstärker mit G=200 verstärkt und an den PID Regler gegeben. Der PID Regler besteht nur aus einem OpAmp und steuert dirket den Piezotreiber an. Leider finde ich keine guten Reglerparameter, egal, was ich mache, es schwingt. Einstellregeln nach Ziegler-Nichols oder nach Betragsoptimum greifen nicht. Meine Vermutung ist, dass die Phasenverscheibung zu groß ist. Im Anhang eine Aufnahme der Schwingung. Man sieht Piezospannung (violett) und Ausgang des INA326 (gelb). Die Frequenz entspricht der Resonanzfrequenz des Piezos. Kann es sein, dass der INA326 für diese Anwendnung zu langsam ist? Seine 3db Grenzfrequenz liegt bei 1 kHz. Welche Ursachen gibt es noch? Gruß und Vielen Dank!
Angehängte Dateien:
-

ACRN0048.PNG
5,9 KB
Angehängte Dateien:
-

pid2.jpg
67 KB
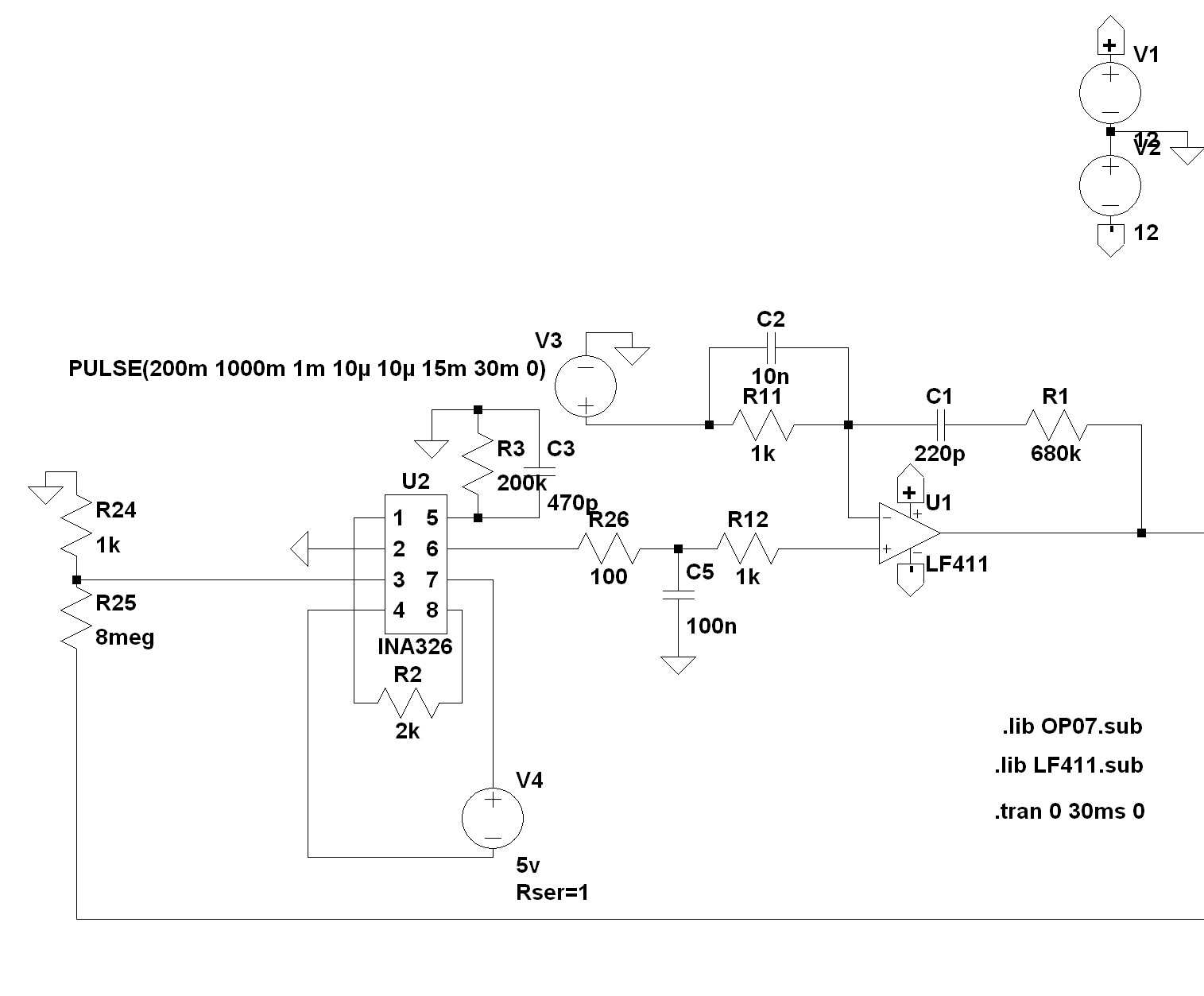
Einen Schaltplan des Reglers uns des INA326 habe ich natürlich auch noch. Den Spannungsteiler einfach ignorieren, das war nur der Versuch, die Schaltung zu simulieren. Rechts gehts dann zum Treiber weg. Grüße, Benito
Hallo, kann keiner etwas dazu sagen? Was mir zu denken gibt ist die Tatsache, dass die Piezospannung und die Spannung am Dehnungsmessstreifen nahezu um 180° Phasenverschoben ist. Selbst im Resonanzfall dürften es aber nur 90° sein. Das kann ich mir nicht erklären. Kann die weitere Phasenverschiebung durch den verwendeten Instrumentenverstärker hervorgerufen werden? Kann ein Wechsel zu einem anderen Verstärker hier Abhilfe schaffen? Grüße, Benito
Die einfachste Maßnahme um das Schwingen in den Griff zu bekommen, ist die Verstärkung herabzusetzten. MfG
Phasenschiebung ist meine Meinung nach korrekt. Wenn der Piezo "unten" ist, steurt der OPV nach oben. Er steuert gegen, finde ich korrekt. somit hast du eigentlich keine Phasenverschiebung! Ich denke die Verstärkung ist zu hoch. Sie ist so hoch, dass es sich gerade nicht aufschwingt, es schwingt stabil. Nimm Kp etwas runter und erhöhe Ki, den Integral-Anteil.
Mein Tip: D-Anteil erhöhen. und I-Anteil verringern. Da er doch schon gegensteuern soll, sobald sich der Piezo in die korrekte Richtung bewegt. Momentan schwingt er noch zu weit ueber, da der I-Anteil zu groß ist würde ich sagen.
Was ist denn die Bandbreite des Piezos ? Was ist die Bandbreite des Systems ?
Danke für eure Antworten. Werde noch etwas mit den PID-Parametern spielen und mal einen anderen Instrumentenverstärker testen. Der Piezo hat seine Resonanzfrequenz bei etwa 400 Hz, beim System ist die langsamste Komponente der Instrumentenverstärker, der seine -3db Frequenz bei 1kHz hat.
Hallo, meiner Meinung nach ist es wichtig das Verhalten des angeschlossenen "Mechanischen" Systems zu kennen. Die Anlage bildet ja mit der mechanischen Strecke und der Elektronik zusammen ein rück gekoppeltes System. Optimal einstellen kannst Du das nur wenn Du das Verhalten des mechnischen Systems kennst. Aus meinen Vorlesungen weis ich noch das man das Verhalten eines solchen Systems durch messen der Sprungantwort bestimmen kann. Dazu legst Du ein 0->1 Signal auf Dein Steuerglied und misst über deinen Sensor das Verhalten. Diese Sprunkantwort kannst Du dann mathematisch zerlegen und die exakt benötigte Rückkopplung bestimmen. Versuchen und Probieren geht natürlich auch. Ich weis aber das PID-Regler nicht so einfach in den Griff zu bekommen sind. Es kann sehr langwierig sein sich an die optimalen Parameter heran zu tasten.
Mit einer Piezoresonanz bei 400Hz, sollte man den Piezo mit weniger ansteuern, dh bei 400Hz sollte schon nichts mehr kommen. Ich wuerd einen RC Tiefpass von 150Hz zwischen der Treiberstufe und Piezo haben. Der Regler sollte eubrigens nicht nur als Endwertregler dimensioniert werden sondern auch zur Stoergroessen Unterdrueckung. Trittschall, Luefter, Infraschall von Aussen, .. kann das System beeinflussen.
Um Wolfgang Heinemann noch ein klein wenig zu korrigieren. Der Einheitssprung darf nur im Bereich um denn Arbeitspunkt stattfinden. bei nichtlinearen Systemen wird das ganze schwieriger
Danke für eure Hilfe! Die Sprungantwort des Systems hatte ich schon aufgenommen und die PID Parameter dementsprechend ausgelegt. Das hat aber leider nicht funktioniert, das geschlossene System fing das schwingen an. Ich habe in Erinnerung, dass man die Pole und Nullstellen der Übertragungsfunktion des Reglers genau so einstellen kann, dass sie die Pole und Nullstellen der Übertragungsfunktion des Sytstems kompensiert. Da es sich aber um ein nichtlineares Sytstem handelt, scheint die Theorie, die ich kenne, nicht zu greifen. Ich teste heute mal einen Notch-Filter, der genau die Resonanzfrequenz des mechanischen Systems herausfiltert. Wenn es damit nicht funktioniert, steige ich auf den Tiefpass um, der aber wahrscheinlich viel Dynamik kosten wird.
Hi, um die Sprungantwort zu messen muss der Kreis aufgetrennt werden. Ich denke dass der Piezo anschwingt und dann langsam abklingt, da er ja keine neuen Impulse zur Schwingungsanregung mehr bekommt. Die Sprungantwort zu mesen ist bei dem System bestimmt nicht einfach und, ja man muss wohl mit kleinen Amplituden arbeiten damit der Piezo nicht zu stark schwingt. Ich denke übrigens auch dass mechanische Schwingungen probelmatisch werden können. Der Piezo kann ja schließlich auch als Sensor für mechanische Einflüsse genuzt werden. Ich glaube auch nicht dass ein Notch-Filter die Lösung ist. Ein Tiefpassfilter ist sicherlich der bessere Ansatz. Was den Verlust an Dynamik angeht ... ja, die Dynamik bleibt immer ein wenig auf der Strecke. Allerdings hat das System (mechanisch) eine obere Grenzfrequenz. Über die kommt man sowieso nicht raus. Darum ist es ja auch interessant die Sprungantwort zu kennen um möglichst nahe an diese obere Grenzfrequenz heran gehen zu können. Wenn das Tiefpassfilter "steiler" (höhere Güte) gewählt wird, kommt wieder näher an das maximum heran. Wenn ich mich aber nicht allzu sehr irre entspricht das genau dem Verhalten eines optimal abgestimmten PID-Reglers ...
Hallo, die Lösung mit dem Notch Filter funktioniert! Nach dem Einbau des Notch Filters habe ich nach Ziegler-Nichols eingestellt und ein recht gutes Ergebnis erhalten. Weitere Optimierung wird folgen. Die Sprungantwort am aufgetrennten Kreis zu messen ist relativ unspektakulär. Da kommt nur eine, bis zu einem Grenzwert, linear ansteigende Kurve bei raus. Das Einschwingen geht sehr schnell, der Piezoantrieb ist recht steif. Einen Tiefpassfilter mit 250Hz Grenzfrequenz und 24db Dämpfung pro Oktave habe ich auch probiert. Funktioniert auch, ist aber ein kleinwenig langsamer.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.