Hallo Ich habe mit meinem µController eine gleitende Mittelwertberechnung realisiert. Wenn ich mir die Werte die errechnet werden in Excel importiere, ist das Tiefpassverhalten gut zu sehen. Wie kann ich diesen Tiefpass nun berechnen? Also Grenzfrequenz, Eckfrequenz, Ordnung des Tiefpasses... Generell würde mich der theoretische Hintergrund interessieren. Sicher könnt ihr mir da weiter helfen. Grüße! Bean
Die Grenzfrequenz berechnet man nicht, die gibt man vor, wenn man ein Filter bastelt. Also genauer: Wenn man die Koeffizienten des Filters berechnet. Und dafür gibt's z.B. MATLAB :-) Für die Theorie siehe z.B. hier: http://wwwex.physik.uni-ulm.de/lehre/physikalischeelektronik/phys_elektr/node65.html Ach so, jetzt versteht ich die Frage erst so richtig glaube ich: Die Koeffizienten eines FIR-Filters erhält man ja, wenn man sich die Impulsantwort anschaut. Von dieser kommt man zum Frequenzgang durch eine inverse diskrete Fouriertransformation.
Außerdem: Ordnung d. FIR-Filters = Anzahl d. Filterkoeffizienten minus 1
Hallo ja genau, Also ich habe mir jetzt im Excel eine Sprungantwort des Filters zeichnen lassen. Aber ich habe diese Sprungantwort eben nur als "Bild". Wie bekomme ich jetzt die Werte raus mit denen ich weiterrechnen kann? Gruß!
Ausgehend von der Sprungantwort müsstest Du die Ableitung bilden, um die Impulsantwort zu erhalten. Aber wozu die Mühe, wenn eine einzelne 1 ins Filer reingeschickt doch schon die Koeffizienten ergibt :-) Die Zahlenwerte an sich hast Du doch, oder was steht in den Zellen Deiner Excel-Tabelle?
Angehängte Dateien:
-

Diagramm.png
13 KB
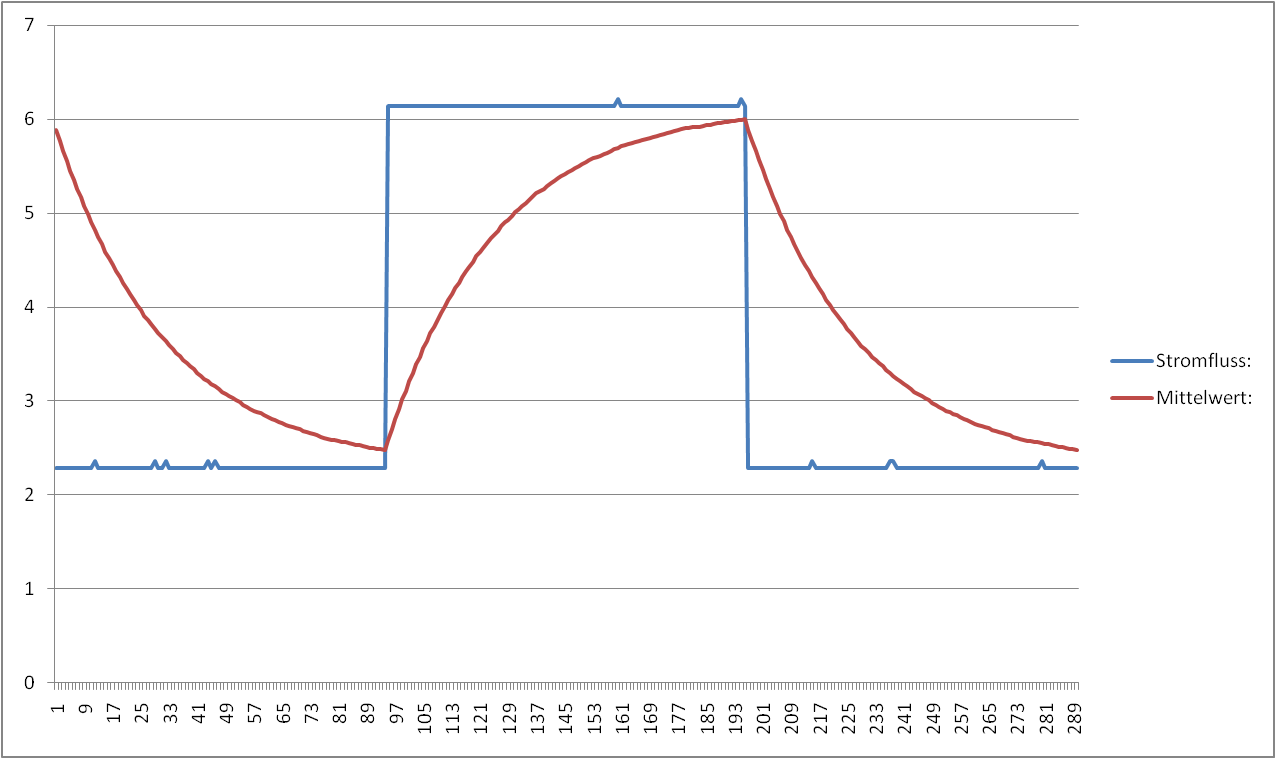
hmm ja, in den Zellen stehen Zahlenwerte. Ich messe einen Strom. Dieser steigt dann Sprunghaft an. So "simuliere" ich einen Sprung. (Siehe Bild) Die Werte des Mittelwerts nähern sich dann an den eigentlichen Strom an. Ich brauch doch aber irgendwie die Zeitkonstante oder täusche ich mich da? Wie kann ich mit den Werten die ich in Excel habe weiter rechnen? Gruß!
Was willst Du jetzt berechnen, ein digitales FIR-Filter oder ein analoges RC-Glied? Das ist mir im Moment nicht so ganz klar.
Einen digitalen Filter. Die rote linie in dem Diagramm sind die Mittelwerte die in meinem Controller berechnet wurden. Ist also denke ich digital ;-) Gruß!
Am einfachsten würdest Du die Grenzfrequenz erhalten, wenn Du einen Funktionsgenerator benutzt und einen Sinus mit variabler Frequenz duch Deinen µC schickst. Dann siehst Du mit einem Oszilloksop am Ausgang, bei welcher Frequenz sich Dein Eingangssignal mehr oder weniger schnell verabschiedet ;-) Ah ja und Deinen Code könntest Du auch mal posten, zumindest den für die Berechnung relevanten Teil.
Wie bereits gesagt: Filterordnung = Koeffizienten -1 = Fensterlänge -1 Ein Mittelwertfilter mit gerader Anzahl Koeffizienten blockt alle Signale mit 2, 4, 6, ..., halbe Anzahl Koffizienten x Sampling Frequenz. Am einfachsten kann man die Grenz und Eckfrequenzen ermitteln, indem man die Amplituden über Frequenz plottet.
Hallo Vielen Dank für die Antworten! Hier mal noch der Code den ich zur Mittelwertbildung verwende. Stammt auch aus einem Beitrag hier im Forum:
1 | long mittelwert_filter(long newval) |
2 | {
|
3 | static short n = 1; //Zählvariable anlegen |
4 | static unsigned long avgsum; //Variable zur Summenspeicherung anlegen |
5 | unsigned long avg; //Variable zur Mittelwertspeicherung anlegen |
6 | |
7 | if (n<32) //Mit dieser if Schleife wird die Fenstrgröße festgelegt |
8 | //hier sollte eine 2er potenz für die Größe gewählt werden.
|
9 | {
|
10 | avgsum += newval; //Wert n-mal aufaddieren |
11 | avg = avgsum/n; //Summer durch n teilen |
12 | n++; //n um eins erhöhen |
13 | }
|
14 | else
|
15 | {
|
16 | avgsum -= avgsum/32; |
17 | avgsum += newval; |
18 | avg = avgsum/32; |
19 | }
|
20 | return avg; |
21 | |
22 | }
|
Zum Messen der Grenzfrequenz mit dem Oszi noch eine Frage. Ich habe ja in dem Sinne keinen Ausgang. HIerfür bräuchte ich ja wieder einen DAC. Oder wie hast Du das gemeint @Marc Brandis ;-) Gruß Bean
Dein TP per Mittelwertbildung sollte durch ein PT1-Glied gut angenähert sein. In der Sprungantwort in Deinem Diagramm sucht Du 63% vom Maximalwert (Strom). Genau an dieser Stelle findest Du Deine Zeitkonstante!
Mr Bean schrieb: > Zum Messen der Grenzfrequenz mit dem Oszi noch eine Frage. Ich habe ja > in dem Sinne keinen Ausgang. HIerfür bräuchte ich ja wieder einen DAC. > Oder wie hast Du das gemeint @Marc Brandis ;-) Ja, so in der Art. Sinus-Signal mit variabler Frequenz --> ADC --> Rein ins das "Filter" --> Digitale Ausgangswerte aus Deinem Algorithmus --> DAC --> Eingang Oszilloskop.
Das 'gleitende Mittelwertfilter', das Du beschrieben hast, ist ein IIR Filter mit der Differenzengleichung y(k)=-1/32*y(k-1)+x(k) Das Ding hat die z-Übertragungsfkt. H(z)= 1/(z+1/32) Ersetzen des z durch exp(j*w) liefert Dir den Frequenzgang, nen Tiefpaß 1.Ordnung mit einer maximalen Sperrdämpfung bei der halben Abtastfrequenz von ca. 0.5dB. Ich hoffe, dass ich mich nicht verrechnet habe. Cheers Detlef
Detlef _a schrieb: > Das 'gleitende Mittelwertfilter', das Du beschrieben hast, ist ein IIR > Filter mit der Differenzengleichung > > y(k)=-1/32*y(k-1)+x(k) Nehmen wir an, diese Differenzengleichung sei korrekt. Nun die z-Transformation:
Mit z durchmultiplizieren:
Die Terme mit Y(z) auf eine Seite bringen:
Y(z) ausklammern:
Durch X(z) und durch (z+1/32) dividieren:
Dies ist die Übertragungsfunktion. Es gibt eine Nullstelle (z=0) und eine Polstelle (z=-1/32). Dies erscheint mir für ein IIR-Filter ehrlich gesagt auch plausibler als nur eine Polstelle :-)
Dein Filter berechnet einen "modifizierten gleitenden Mittelwert" nicht den "gleitenden Mittelwert" im eigentlichen Sinne. (FIR Filter mit Mittelwert über die letzten N Werte)
ja, meiner Überragungsfkt. fehlt das z. Das macht aber für den Betragsfrequenzgang keinen Unterschied, weil die Entfernung von jedem Punkt des Einheitskreises zum Nullpunkt immer eins ist (das ist ja gerade das Schöne am Einheitskreis). Die Eins steht dann im Zähler der Übertragungsfkt. wenn der 'alte wert des Zustandsspeichers' (also im Beispiel avgsum vorm update) Ausgangswert wäre. Cheers Detlef
Hallo! Vielen Dank für eure Antworten. Hat mir egentlich wirklich sehr geholfen. Ich hab jetzt aber nochmal für mich die Formel aufgestellt und komme irgendwie auf was anderes.
Das ist was ich heraus bekomme. Wo liegt da mein Rechenfehler? Ich hab halt noch den Therm mit
drinnen. Bin von folgender Formel ausgegangen:
Oder bin ich einfach von der falschen Anfangsformel ausgegangen? Gruß! Bean
sorry, sollte
heißen. Gruß Bean
y ist der modifizierte, gleitende Mittelwert und u ist der Eingang. Die Differenzengleichung ist dann y_k+1=31/32 y_k+1/32 u_k+1 (oder evtl y_k+1=31/32 y_k+1/32 u_k was aber eher ungewöhnlich wäre.) Im ersten Fall hat man die Übertragungsfunktion zY =31/32 Y +1/32 zU U/Y= (1/32 )z/ (z-31/32) Also eine Nullstelle bei z=0 und ein Pol bei z=31/32<1. Somit ist das Filter stabil und zudem schwingt es nicht. Es hat eine statinäre Verstärkung von 1. In der "Filterdarstellung. U/Y= 1/ (1-31 z^1) Es gibt also keine Verzögerung.
Guten Morgen! @Gast: Danke für die Antwort. Allerdings habe ich Schwierigkeiten nachzuvollziehen wie Du auf die Differentialgleichung kommst. Kannst Du das noch etwas näher erklären? Hast Du die aus meinem C Code abgeleitet? Außerdem wären ein paar Klammern glaube ich hilfreich. Gruß Bean
Angehängte Dateien:
-

Mittelwert.PNG
18 KB
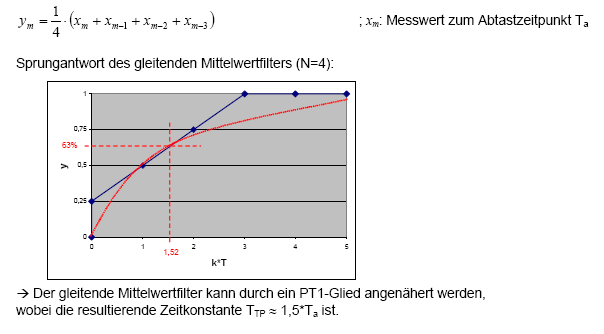
Wie ich schon am 06.07.2009 schrieb, kann man die Mittelwertbildung näherungsweise durch ein PT1-Glied beschreiben. Sicher ist das Aufstellen und Berechnen der Übertragungsfunktion die 100%-ige Variante... und wenn's gefordert ist, führt kein Weg daran vorbei! Wenn's aber nur darum geht, das Verhalten des Mittelwertfilters in guter Näherung zu beschreiben, dann würde ich auch die wesentlich einfachere Näherungslösung bevorzugen. Exemplarisch mal an einem Mittelwertfilter mit N=4 dargelegt.
Ja das stimmt, klar kann man das ganze annähern. Ich wollt aber trotzdem gerne die Übertragungsfunktion. :-) Grüße Dominik
Hi Mr Bean,
also ich habe mir den C Code nochmal angeschaut.
Du hast
avgsum -= avgsum/32;
avgsum += newval;
avg = avgsum/32;
Was abgesehen vom Rundungsverhalten, Rechenaufwand (?) und der
Initialisierung sich wie
avgsum -= avgsum/32; (1)
avgsum += newval/32; (2)
avg = avgsum; (3)
verhält. Du willst nur die Ü-Funktion, also ist dies egal.
Nimm
y - avgsum
u - newval
Also ist
y_(k+1)=y_(k)-y_(k)/32+u_(k+1)/32
(die ungewöhnliche Variante wäre Vertauschung von (2), (3))
Dann die z-Trafo zur Ü-Funktionbestimmung (ohne Berücksichtigung von
Anfangswerten)
zY(z)=31/32 Y(z)+1/32 U(z)
Umstellen, fertig.
Matlab liefert ein monotones Tiefpassverhalte mit -36 db bei der halben
Abtastfrequnz. Grenzfrequenz -3db ca bei 1/200 der Abtastfrequenz.
Also sehe ich das richtig dass sich die Differentialgleichung zu:
und die Übertragungsfunktion zu :
?? Wenn ich das dann durch Y ausklammern etc. umstelle, komme ich auf:
Fehlt mir da nicht noch ein ein z im Zähler? Gruß und Danke Bean
Ah ich habe da ein Tipp-Fehler gemacht zY(z)=31/32 Y(z)+1/32 zU(z) <-- z vor U(z) Es ist keine Differentialgleichung, sondern eine Differenzengleichung.
Hallo Ah ja, jetzt passt es. Aber der Pol bei 31/32 macht mich doch etwas stutzig, ich meine mich dunkel daran erinnern zu können dass bei einem stabilen System kein Pol in der rechten s-Halbebene vorkommen darf. Ist aber auch schon ne ganze Weile her... :-) Gruß Bean
Es ist ein zeitdiskretes System (Differenzengleichung) und kein zeitdiskretes (DGL)! Für Stabilität müssen alle Pole in der z-Ebene (!) im Einheitskreis sein - 31/32 ist das. Da der Pol auf der rechten Seite auf der Realteil-Achse ist, schwingt das System nicht.
Hallo Ich hab mir die Sache noch einmal angeschaut. Ich habe leider noch immer Probleme mit der Formel ansich die sich aus dem Code ergibt. Muss ich die Summe die sich in der ersten if Schleife ergibt nicht auch bei der Transformation berücksichtigen? Ich hab ja eigentlich sowas:
Wie kann ich eine Summe transformieren? Sorry dass ich den Thread nochmal vorkram und nochmal frag, aber ich stolper immer wieder über diese Formel und bin mir nicht sicher ob die Transformation so stimmt. Gruß Bean
Hi Bean, Der Einfachheitshalber würde ich nur den Teil ab n=32 anschauen (mit z-Trafo). Nach einiger Zeit ist der Anfangsteil vernachlässigbar. (Filter ist asymptotisch stabil) Auch kann man mit der z-Trafo nur Übertragungsfunktionen von zeitinvarianten Systemen anschauen. Fazit: die ersten 31 Schritte ändern das Übertragungsverhalten nur am Anfang des "Filterns". Summe transformieren: wie oben erwähnt musst du dazu die Filterformeln umschreiben.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.