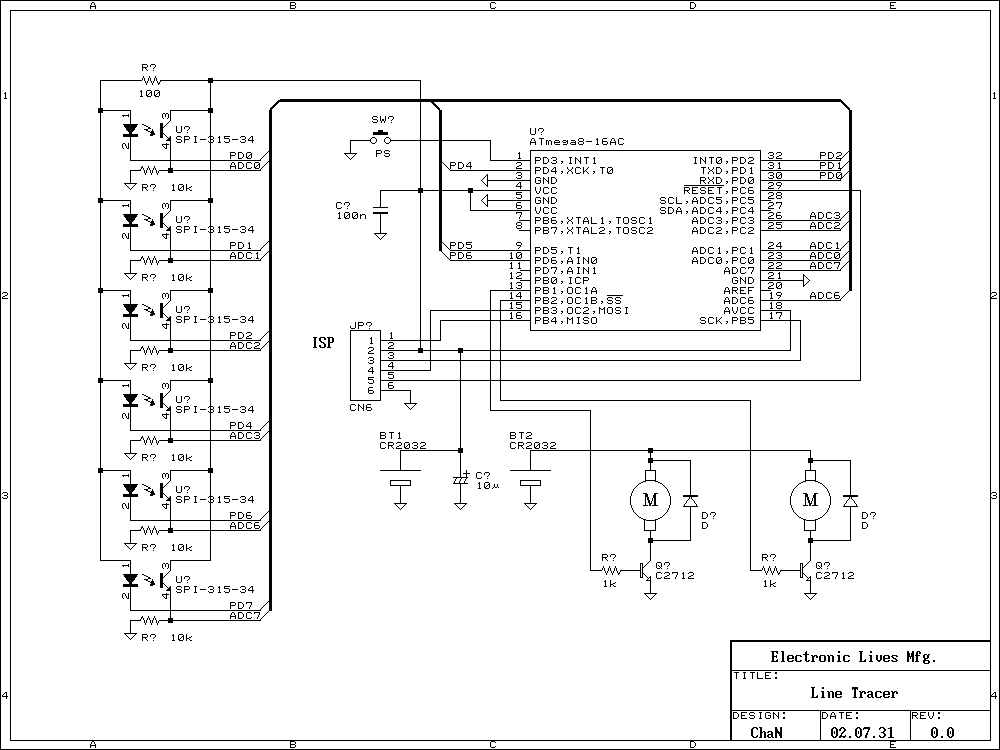
Hallo! Ich bin gerade dabei das ich eine Platine für einen line following robot (http://elm-chan.org/works/ltc/report.html) entwerfe. Den Schaltplan habe ich angehängt, ist aber auch auf der Homepage zu finden) Der Roboter wurde schon mal im Forum besprochen, eine Platine hat aber glaube ich noch keiner entworfen! Jedenfalls bin ich gerade mit dem Routing fertig geworden wo ich plötzlich gesehen habe, da stimmt doch was nicht! Also wenn ihr den Schaltplan anseht: Bei PD5 und PD6 geht die Verkabelung vom Mikrokontroller auf die linke Seite zu den Sensoren, dort finde ich jedoch keinen PD5 mehr. Kann vielleicht jemand für mich diesen Plan mit den Anschlüssen auf dem Foto kontrollieren. Foto: http://elm-chan.org/works/ltc/ltc02.jpeg Danke
Angehängte Dateien:
-

ltc.png
7,8 KB
{kind=link}
Hallo, naja, benutzt hat er ja laut Plan PD0,1,2 und PD4,5,6 am AVR. Da elm-chan seine Sourcen ja sehr gut kommentiert (grrr....), und dort PD0-2 und PD4-7 als Ausgang gesetzt werden und die Source nicht so gut lesbar ist, daß ich die Zusammenhänge so schnell durchschaue... Hmm, um die alle LED auszuschalten setzt er 0x7F, ich denke also, PD7 sollte PD6 heißen und PD6 wird PD5. Offenbar hat er von Hand Namen rangeschrieben und sich vertan. Gruß aus Berlin Michael
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.