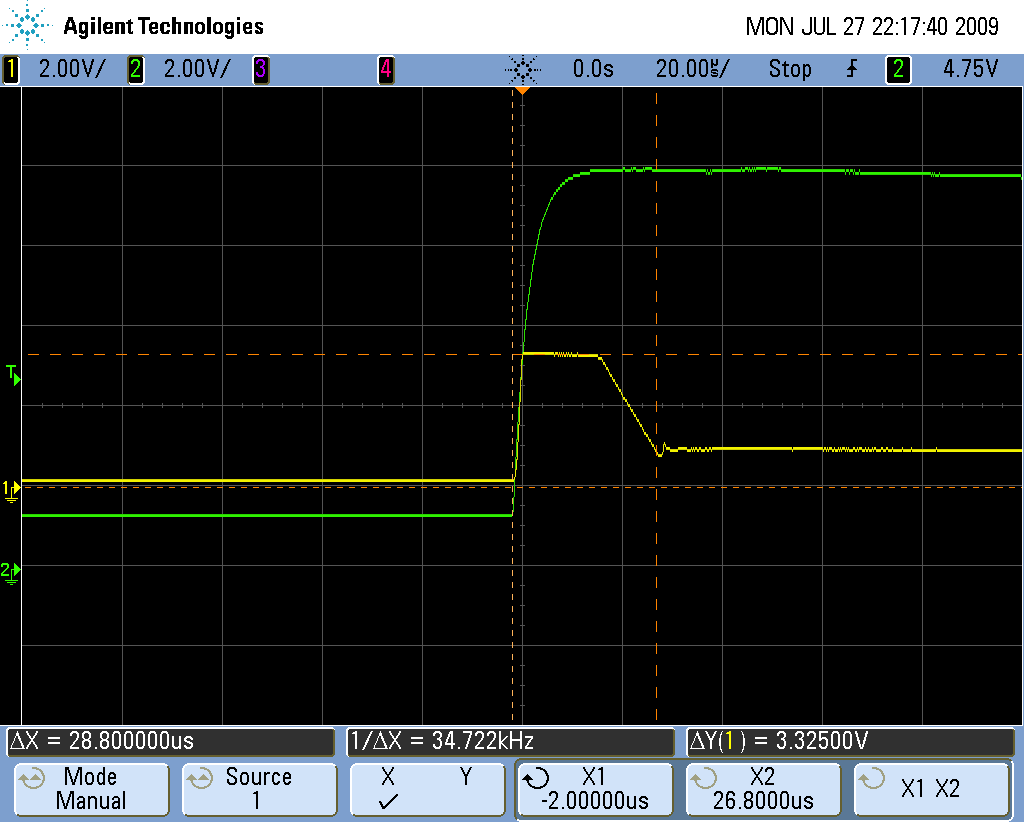
Guten Tag zusammen Ich habe einen PID-Regler zum betreiben einer Stromsenke ausgelegt der an sich auch wunderbar Funktioniert. Nur tritt bei größeren Strömen ein sehr Starkes überschwingen zu Beginn des Sprunges auf. Zu sehen in der angehengten Grafik. Erklären kann ich es mir so: Die Strecke (bestehend aus dem Transistor) kommt nicht so schnell nach wie der I-Teil des PID möchte (zu Steile Flanke der Führungsgröße) und somit schiesst der I-Teil über das Ziel hinaus und es kommt zu dieser Spitze. Lösen konnte ich dies indem ich die Anstiegszeit der Führungsgröße durch einen Tiefpass begrenzt habe. Jedoch wird dann die Regelung viel zu langsam. Meine Frage ist nun: Wie bekomme ich dieses Überschwingen am Anfang heraus ohne denn Regler arg zu verlangsamen? P.S. Schaltplan folgt im nächsten post.
Angehängte Dateien:
-

bo1.png
11 KB
Angehängte Dateien:
-

Stromsenke.PNG
5,2 KB
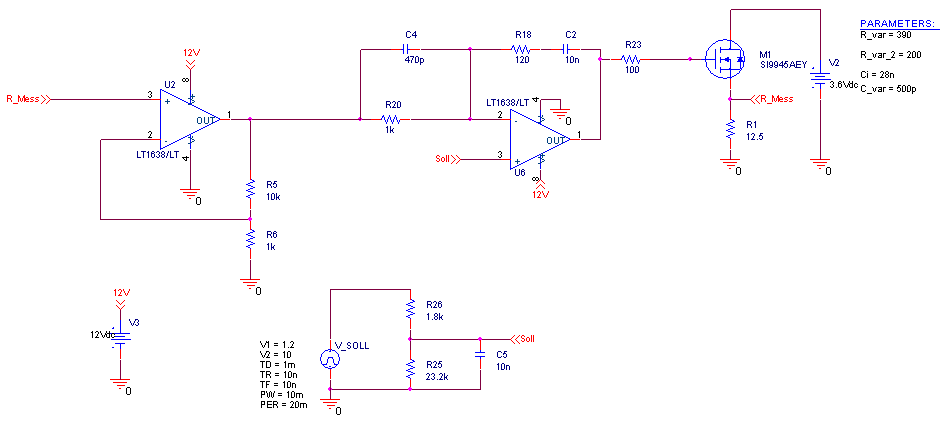
Hier noch der Schaltplan. Zu der oberen Grafik: Die Grüne Linie ist die Führungsgröße und die Gelbe der Strom durch denn Widerstand R1.
Hi, glaube eher, dass es am D-Anteil liegt. Der PID kompensiert ja zwei Zeitkonstanten, möglicherweise solltest du es mit einem PI versuchen. Ist jetzt aber eher vermutet, weil ich nix über deine Strecke weiß. kannst du zu der noch was sagen? (evtl. ergibt sich das aus dem Schaltplan).
Evtl. macht Vorsteuern noch sinn. Könntest du mal ausprobieren, selbst bei Konstanter Vorsteuerung könntest du schon entscheidend gewinnen. Ist für den Transistor eine PT1-Strecke anzunehmen? (ich hab keine Ahnung von Transistorstrecken).
Angehängte Dateien:
-

PID.JPG
57 KB
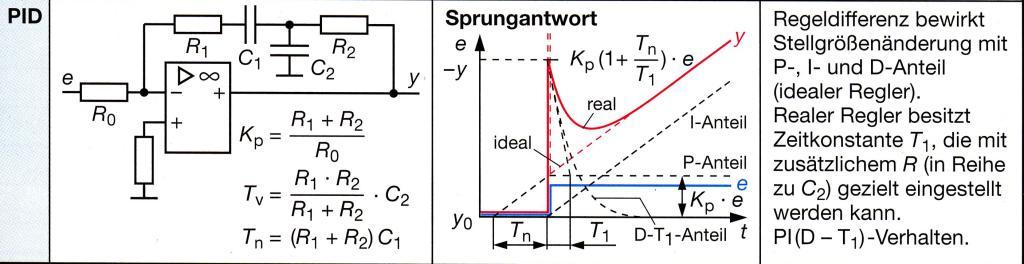
Wie Käase schon richtig vermutet, liegt das Übersteuern am D-Anteil. Hier also C4. Da Deine Strecke ja schon sehr schnell ist, würde ich einen PI oder vielleicht auch einen reihnen I-Regler nehmen. (Wird oft bei Netzgeräten gemacht.) Einen PID würde ich nur so aufbauen wie im Anhang beschrieben. Dann ist das Übersteuern des OP nicht so wahrscheinlich wie bei Deiner Lösung mit C4.
Der D-Anteil knallt dir impulsartig zu viele Ladungsträger auf dein Gate und beschert dir dieses Ergebnis.
Wann wird denn dann überhaupt ein PID-Regler verwendet? Ich dachte eigentlich bisher das dies so der allroundregler schlechthin ist.
Also habe ich denn Aufbau mit einem PI-Regler und einem reinen I-Regler aufgebaut und erhalte immer noch dieselben Effekte. Sowohl in der realität als auch in der Simulation. Das heißt, dass Problem muss woanders herkommen
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.