Hallo,
ich bin gerade unterwegs und habe meinen Codeschnippsel von der ISR des
InputCaptures nicht parat.
Ich versuche trotzdem mein Problem zu schildern, kann nämlich erst heute
Abend den Code posten:
Ich will mit dem ICP-Pin des ATmega8 Zeiten messen (positive Flanken).
Für einen kompletten Zyklus muss ich 5 Zeiten einlesen, um damit
weiterarbeiten zu können.
Mein Problem ist, dass mein Timer NIE beim ersten Interrupt bei 0
anfängt zu zählen.
So habe ich festgestellt, dass der erste Zeitwert auch mal -253 betragen
kann, ich möchte aber mit positiven Zahlen rechnen, darum soll der Timer
bei 0 beginnen, wenn der erste Interrupt auftritt.
Wenn die 5 Messungen komplett sind, wird diese ISR gesperrt und die
Werte werden verarbeitet.
Sobald das erledigt ist, wird die ISR wieder freigegeben und der
Timerwert mit ICR1 = 0 auf 0 gesetzt, aber mir scheint es, dass der
Timer dann wieder von alleine anfängt zu laufen. Der soll aber erst bei
einer positiven Flanke wieder anfangen zu laufen, wie kann ich das dem
ATmega8 in C beibringen?
MfG, Joe
Joe schrieb:
> So habe ich festgestellt, dass der erste Zeitwert auch mal -253 betragen> kann,
Timerwerte sind grundsätzlich unsigned!
> ich möchte aber mit positiven Zahlen rechnen, darum soll der Timer> bei 0 beginnen, wenn der erste Interrupt auftritt.
Ist unnötig.
Die Differenz zweier Timerwerte ist (wegen unsigned) immer richtig,
solange nicht mehr als 1 Timer Overflow und die maximale Anzahl an
Timerticks (65536) dazwischen liegt.
> Sobald das erledigt ist, wird die ISR wieder freigegeben und der> Timerwert mit ICR1 = 0 auf 0 gesetzt, aber mir scheint es, dass der> Timer dann wieder von alleine anfängt zu laufen.
Nur der Vollständigkeit halber:
Ein Timer läuft, sobald er einen Vorteiler zugewiesen hat.
Soll ein Timer stehen bleiben, muss man den Vorteiler abschalten.
Aber wie gesagt: Ist unnötig, wenn du garantieren kannst, dass zwischen
2 ISP Interrupts nicht mehr als 1 Overflow liegt. Einfach unsigned
rechnen ist ausreichend.
>> So habe ich festgestellt, dass der erste Zeitwert auch mal -253 betragen>> kann,> Timerwerte sind grundsätzlich unsigned!
Ich habe es so definiert (vereinfacht, da ich den Code nicht bei mir
habe):
volatile unsigned int Zeit;
Zeit = ICR1;
ausgabe(); --> da kommt dann auch mal ein -253 raus
> Aber wie gesagt: Ist unnötig, wenn du garantieren kannst, dass zwischen> 2 ISP Interrupts nicht mehr als 1 Overflow liegt. Einfach unsigned> rechnen ist ausreichend.
Ja, das kann ich garantieren (wenn mich mein Wissen nicht täuscht)!
Es handelt sich hierbei um eine Auswertung des UTI03, falls dir das
etwas sagt?! Der gibt mir eine Art PWM aus, die ich auslesen und
berechnen muss.
Wenn ich nun die 5 Werte eingelesen habe, müssten doch eigentlich 2
Werte annähernd gleich sein, da der UTI mit den zwei kleinsten Werten
den Startpunkt für die Messung angibt.
Lasse ich mir nun die 5 Messungen per UART ausgeben, so kann ich nicht
feststellen, dass zwei Werte gleich sind.
Ich habe das ganze mal auf 8 Werte hochgesetzt, aber auch da gibt es
keine zwei gleichen Werte.
Ich ziehe jedes Mal den alten Messwert vom neuen Messwert ab, um auf die
Zeitdauer zu kommen.
Werte sehen aber so aus: 23654 # 20542 # -21 # -235 # -513 # 12 # 1358
Trennzeichen ist hier mal die Raute, Werte sind fiktiv^^
Da kann doch was nicht stimmen, oder?
Ist wohl besser, wenn ich den Code mal poste?!
Joe schrieb:
>>> So habe ich festgestellt, dass der erste Zeitwert auch mal -253 betragen>>> kann,>> Timerwerte sind grundsätzlich unsigned!>> Ich habe es so definiert (vereinfacht, da ich den Code nicht bei mir> habe):>> volatile unsigned int Zeit;> Zeit = ICR1;> ausgabe(); --> da kommt dann auch mal ein -253 raus
Bei einem unsigned Wert kann per Definition nichts negatives
herauskommen. Wie der Name schon sagt hat ein unsigned Wert kein
Vorzeichen.
> Ist wohl besser, wenn ich den Code mal poste?!
Das auf jeden Fall.
Hier auszugsweise der Code. Es fehlt nur die UART-Routine, die
funktioniert aber und hab die wegen der besseren Übersicht weggelassen:
Bitte nicht meckern, der Code ist noch nicht sauber formatiert und
dokumentiert...
TIFR |= (1 << ICF1); // Löschen des Interruptflags für ICR1
92
INTERRUPTein;
93
NeueDaten = FALSE;
94
}
95
_delay_ms(200);
96
97
} // while(1)
98
} // main
Ich lasse mir die Timerwerte ausgeben, als Ergebnis bekomme ich:
-13688#-28739#28948#-23479#26793#
Das kann doch gar nicht sein! Wie kann der Timerwert negativ werden?
Joe schrieb:
> void ausgabe (void)> {> itoa(Ergebnis, string, 10); // 'Ergebnis' nach ASCII wandeln
Da haben wir ja einen Übeltäter.
itoa übernimmt, wie der Name schon sagt, einen int. Ein int hat ein
Vorzeichen.
utoa übernimmt, wie der Name schon sagt, einen unsigned.
> Messung[Bloopcounter] = Wcapture - Wcapturealt;
Passt doch.
Du musst nur darauf achten, dass Messung[0] keinen vernünftigen Wert
hat.
Ist ja auch logisch. Dein erster Messwert kann erst dann vorliegen, wenn
die ISR das zweite mal aufgerufen wird.
itoa hat bei mir immer funktioniert, wenn ich ein INT auf die Reise
durch die Kabel zum PC schicke! ;o) Daran kann es ja nicht liegen, denn
selbst wenn ich die Werte berechne kommt Mist raus.
Joe schrieb:
> itoa hat bei mir immer funktioniert, wenn ich ein INT auf die Reise> durch die Kabel zum PC schicke!
Du hast aber keinen int.
Du hast einen unsigned int!
Und nur weil beide 2 Bytes haben, heisst das noch lange nicht, dass itoa
für einen unsigned das passende Werkzeug ist.
itoa kann doch nicht feststellen, ob das was du ihm vorwirfst
tatsächlich unsigned ist oder nicht. itoa übernimmt die beiden Bytes die
du ihm vorwirfst und nimmt an, dass Bit 15 das Vorzeichenbit ist. Bei
dir ist das aber kein Vorzeichen sondern Teil der Zahl!
Oder anders ausgedrückt: itoa arbeitet mit der Annahme, dass das was du
ihm gibst ein Vorzeichen hat.
utoa... und schon wieder was dazu gelernt! Kannte ich noch nicht! Super!
Da hab ich mit meinem itoa wohl immer Glück gehabt...
Ich ändere meinen Code mal ab und melde mich dann wieder.
Erstmal vielen Dank!
> Es handelt sich hierbei um eine Auswertung des UTI03, falls dir das> etwas sagt?! Der gibt mir eine Art PWM aus, die ich auslesen und> berechnen muss.> Wenn ich nun die 5 Werte eingelesen habe, müssten doch eigentlich 2> Werte annähernd gleich sein, da der UTI mit den zwei kleinsten Werten> den Startpunkt für die Messung angibt.
Es ist auch immer eine gute Idee, sich im Vorfeld auszurechnen in
welcher Größenordnung die Messwerte in etwa liegen werden.
Ich glaub, ich steh aufm Schlauch...
Die ISR verlass ich jetzt bei Bloopcounter==6 (Bloopcounter fängt bei 0
an).
Dann habe ich Messung[0] bis Messung[5]
Wenn ich nun Messung [1] bis Messung[5] addiere, kommen immer andere
Timerwerte zum Vorschein. Ist das okay so?
Man, so langsam sehe ich den Wald vor lauter Bäumen wohl nicht mehr.
So habe ich das jetzt.
Trotzdem verstehe ich nicht, warum sich die Timerwerte so dermaßen
ändern, obwohl der UTI doch immer die selben "Perioden" bei gleicher
Temperatur ausgeben sollte, oder?
Du capturest 4 Werte zwischen 5 steigenden Flanken, dann beginnst du von
vorn. Aber die 5. Flanke war ja bereits die 1. Flanke des nächsten
Zyklus. Mit jedem Messdurchgang verschiebt sich also dein Mess-Fenster
um eine steigenden Flanke gegenüber dem Signal, und nur bei jedem 4.
(oder 5.?) Durchgang deckt sich beides.
Übrigens:
> TIMSK |= (1<<TICIE1) | (1<<TOIE1);
Wo ist denn der Code zum Overflow-Interrupt?
> ICR1 = 0;
Diese Zeile erfüllt keine Funktion, schon gar nicht die oben von dir
zugedachte Funktion "Timerwert auf 0 setzen".
Also läuft der Timer doch weiter, wenn ich den mit
> ICR1 = 0;
nicht zurücksetze?!
Dann muss ich die Overflows berücksichtigen, aber wie setze ich den
Timer wieder auf 0? Das wär das beste!
1. "ICR1 = 0;" setzt den Timer nicht zurück. "TCNT1 = 0;" würde das
machen. Aber lass es (siehe 3).
2. Du musst Overflows nur dann berücksichtigen, wenn die Zeit zwischen
zwei steigenden Flanken größer sein kann wie ein kompletter
Timerdurchlauf. Wenn das nicht passieren kann, musst du dir um die
Overflows nicht die geringsten Gedanken machen. Die Subtraktion
berücksichtigt einen Überlauf automatisch.
3. Dein eigentliches Problem ist der Fehler im logischen Ablauf, und die
daraus resultierende nicht-Synchronität zwischen Signal und Messung. Für
die Behebung dieses Problems brauchst du den durchlaufenden Timer.
Zu 1: Danke, werd ich mir merken.
Zu 2: Ein Overflow brauche ich nicht zu berücksichtigen?!
Zu 3: Okay, also, der Timer läuft durch.
Ich führe nun 6 Capture-Messungen durch.
Die erste Messung kann ich verwerfen, und da der Zyklus aus 5
Abschnitten besteht, sollte doch ein kompletter Zyklus in Messung[1] bis
Messung[5] zu finden sein, richtig?
Nun muss ich die beiden kürzesten Signale herausfinden, damit ich weiß,
wo der Zyklus startet. Oh, kann es sein, dass ich bei dieser Auswertung
einen Fehler mache und veraltete Werte nehme, wenn z.B. die kürzesten
Messungen bei Messung[3] und Messung[4] zu finden sind?
Ist jetzt blöd geschrieben, aber ich brauche, wenn ich diesen Zyklus
nehme, Messung[1] und Messung[5] für die Berechnung.
Da der Timer aber fortlaufend ist, können im Grunde die berechneten
Werte gar nicht stimmen, da diese gar nicht mehr aktuell sind.
Also muss ich am besten zwei Zyklen vom UTI einlesen um eine
fortlaufende Messung zu bekommen...
Ist das also mein Problem?
Joe schrieb:
> Zu 2: Ein Overflow brauche ich nicht zu berücksichtigen?!
Nein. Wenn der alte Capture-Wert 65530 ist, und der nächste ist dann 100
(also mit Überlauf dazwischen), dann ist das Ergebnis der Subtraktion
neu-alt 106 (also korrekt).
> Zu 3: Okay, also, der Timer läuft durch.> Ich führe nun 6 Capture-Messungen durch.> Die erste Messung kann ich verwerfen, und da der Zyklus aus 5> Abschnitten besteht, sollte doch ein kompletter Zyklus in Messung[1] bis> Messung[5] zu finden sein, richtig?> Nun muss ich die beiden kürzesten Signale herausfinden, damit ich weiß,> wo der Zyklus startet. Oh, kann es sein, dass ich bei dieser Auswertung> einen Fehler mache und veraltete Werte nehme, wenn z.B. die kürzesten> Messungen bei Messung[3] und Messung[4] zu finden sind?
Woher soll ich das wissen? Ich kann mich schließlich nur auf das
beziehen, was du bisher gepostet hast. Und in dem Code oben passiert
nichts davon. Ich habe das hier:
> Wenn ich nun Messung [1] bis Messung[5] addiere, kommen immer andere> Timerwerte zum Vorschein.
in Bezug auf den Code oben beantwortet.
> Da der Timer aber fortlaufend ist, können im Grunde die berechneten> Werte gar nicht stimmen, da diese gar nicht mehr aktuell sind.
Sorry, aber das ist Blödsinn.
(oder ich verstehe nicht, was genau du damit meinst)
>> Wenn ich nun Messung [1] bis Messung[5] addiere, kommen immer andere>> Timerwerte zum Vorschein.
Bezieht sich auf: Ich führe nun 6 Capture-Messungen durch.
Stimmt, der Code ist nun veraltet.
Also, jetzt noch mal auszugsweise neu:
TIFR|=(1<<ICF1);// Löschen des Interruptflags für ICR1
105
INTERRUPTein;
106
NeueDaten=FALSE;
107
sei();
108
}
Nun sollte ich 10 Elemente im Array haben, die ich verwerten kann.
Nur es passt noch nicht so ganz. Irgendwie will das Vergleichen auf die
kürzesten Zeiten nicht klappen.
Ich bekomme zwar Werte ausgespuckt, aber die sind nicht wahr und
schwanken echt extrem.
Joe schrieb:
> Also, jetzt noch mal auszugsweise neu:
Auszugsweise ist immer schlecht.
> void ausgabe (void)> {> utoa((int)Ergebnis, string, 10); // (int) ist ein "cast" - 'Ergebnis'> nach ASCII wandeln
Was soll der Unsinn.
Entweder Ergebnis ist unsigned, dann ist utoa die richtige Funktion,
oder es ist ein int, dann ist itoa die richtige Funktion.
Manchmal sind casts zwar notwendig, aber generell sind die meisten Casts
einfach nur ein Zeichen, dass irgendetwas furchtbar schief geht.
utoa( Ergebnis, string, 10 );
Und bitte arbeite an deinen Einrückungen.
Das ist absolut nicht lustig, wenn man ständig rauf und runter scrollen
muss um rauszufinden, wo denn eine { wieder geschlossen wird und welcher
Teil von welcher Bedingung abhängt.
> Ich bekomme zwar Werte ausgespuckt, aber die sind nicht wahr> und schwanken echt extrem.
Fang damit an, die Werte vom UTI ohne irgendwelche Rechnereien
auszugeben. Es ist sinnlos, die noch grossartig umzurechnen, wenn die
Eingangswerte schon nicht stimmen.
Alte Weisheit: Garbage in, garbage out. Egal was du dazwischen machst,
wenn die Eingangswerte nicht stimmen, können auch die Ergebnisee nicht
stimmen.
Ergebnis=W3;// Ergebnis der Berechnung ist W3 als double
187
ausgabe();// W3 wird per UART ausgegeben (als Ergebnis)
188
Wcapturealt=0;// alte Capture-Zeit auf 0 setzen
189
TIFR|=(1<<ICF1);// Löschen des Interruptflags für ICR1
190
INTERRUPTein;// Interrupts vom Timer einschalten
191
NeueDaten=FALSE;// Job-Flag auf 0 setzen
192
193
}// if(NeueDaten)
194
195
_delay_ms(200);// 200ms warten
196
197
}// while(1)
198
199
}// main
Hoffentlich habe ich das jetzt ein wenig übersichtlicher gemacht.
Die UART-Routine habe ich hier im Forum gefunden und muss sagen, dass
die gut klappt. Habe mit meiner Drehzahlmessung keine Probleme bei der
Ausgabe, verwende auch den RS485-Bus.
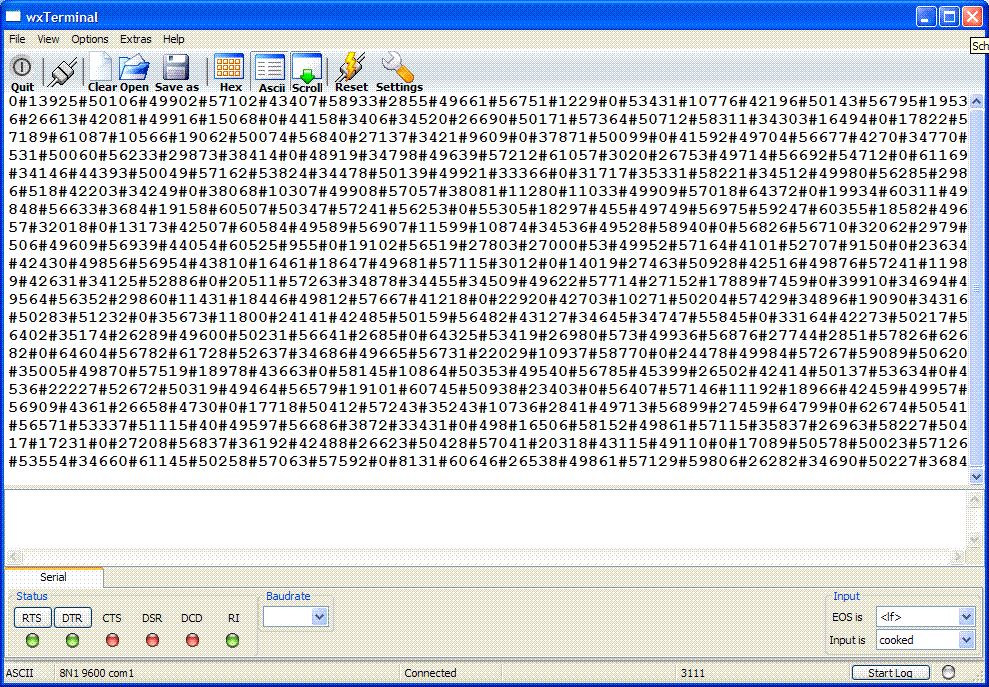
Zum Testen gibt mir dieses Programm nun kontinuierlich die errechneten
Mess-Endergebnisse aus, die Werte sind aber nicht akzeptabel, siehe
angehängtes Bild.
Es handelt sich jeweils um den Messwert vor der Raute.
Wenn ich die einzelnen Timerwerte ausgeben lasse, sieht das genau so aus
wie auf dem Bild.
In einem früheren Post hatte ich schon mal darüber berichtet.
Zur Funktion des UTI habe ich eine PDF angehängt, ich verwende MODE5
(ein PT100 in 4-Leiterschaltung).
Außerdem habe ich ein Basic-Code bekommen, den ich nach C umsetzen
wollte.
Eventuell ist da auch schon der Fehler zu finden?!
Der Basic-Quellcode ist auch im Anhang.
Alle Anhänge sind in einer ZIP, geht hier wohl nicht anders?!
Ich weiß auf jeden Fall nicht mehr weiter, mir kommt es so vor, als ob
die for-Schleife nicht hinhaut.
Achja, ich habe auf Anraten nicht den Timer1 wieder auf 0 gesetzt,
sondern der läuft immer weiter.
Es dürfte nicht sehr sinnvoll sein, die "Phasen" von zwei Sequenzen zu
kombinieren. Der Ansatz, in 10 Werten eine vollständige Sequenz zu
suchen, war da schon sinnvoller. Deine Methode, den Anfang zu suchen,
ist allerdings problematisch. Um Genaueres zu sagen, wäre es
erforderlich, endlich mal zu sehen, was für Werte da überhaupt in
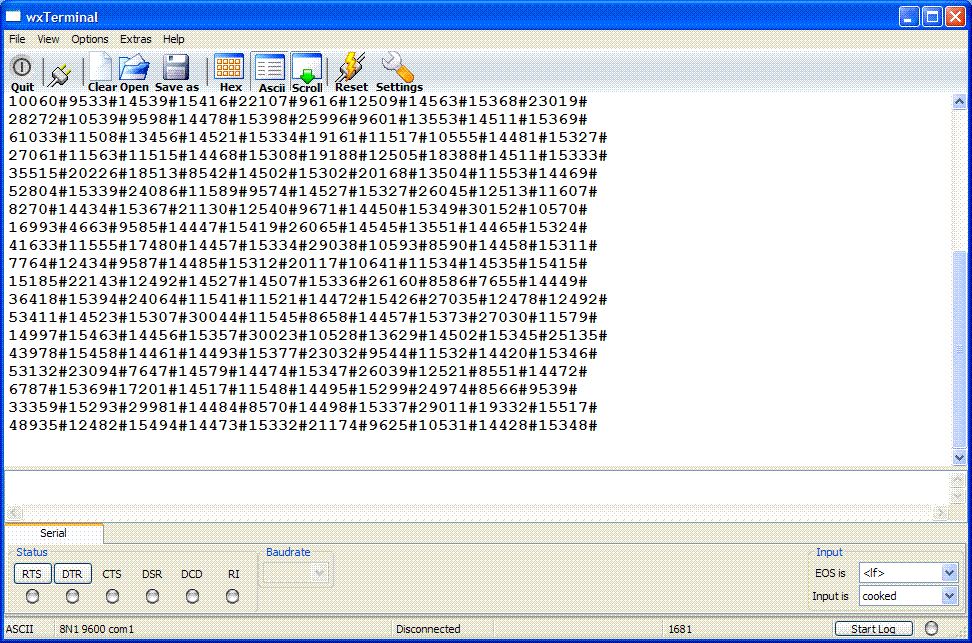
Array drin stecken. Also lese ein paar mehr Werte am Stück ein
(mindestens 10, aber auch ruhig noch mehr), und übertrage sie dann in
einer Schleife ohne irgendwelche weiteren Berechnungen. Zeige hier die
Ausgabe.
>Die UART-Routine habe ich hier im Forum gefunden und muss sagen, dass>die gut klappt. Habe mit meiner Drehzahlmessung keine Probleme bei der>Ausgabe, verwende auch den RS485-Bus.
1
ISR(SIG_UART_RECV)// UART Receive Interrupt wurde ausgelöst
2
{
3
while(!(UCSRA&(1<<RXC)));
4
zeichen=UDR;// den empfangenen Wert in 'zeichen' speichern
5
}
ist aber doppeltgemoppelt.
Wenn du schon in der ISR bist, ist das RXC-Bit auf jeden Fall gesetzt.
Die while-Schleife kannst du dir sparen.
1
UCSRA|=(1<<TXC);// vorangegangene Übertragung ist zu Ende
Du brichst von dir aus die Übertragung ab?
TXC solltest du auswerten (abfragen), um die RS485 wieder auf Empfang
schalten zu können. Das Bit wird (vom Controller) gesetzt, sobald das
letzte Bit den Puffer verlassen hat und kein neues im UDR steht.
Soviel zum Quelltext. Für dein Problem hat Stefan Ernst schon eine gute
Lösug gebracht:
Schmeiss deine Auswertung erst mal raus (auskommentiere reicht).
Dann lässt du dir einfach jeden Wert ausgeben.
Da sollte man dann ein Muster erkennen.
Zumindest habe ich auf Weise schon diverse Modell-Fernsteuerungen
ausgewertet (Multiswitch- und Multiprop-Module).
1
/PortBkonfigurieren
sehr sinnfreier Kommentar, da man das schon am Namen des Ports erkennt.
Wichtiger wäre die Angabe, welcher Pin wie (Richtung, High, low, Pullup)
geschaltet ist.
statt des "Stop-Zeichens" solltest du lieber 0x0D (Carriage Return)
ausgeben. Dann springt vermutlich auch das Terminalprogramm eine Zeile
weiter.
UCSRA|=(1<<TXC);// vorangegangene Übertragung ist zu Ende
> Du brichst von dir aus die Übertragung ab?
Nein, er löscht das Flag.
> TXC solltest du auswerten (abfragen), um die RS485 wieder auf Empfang> schalten zu können. Das Bit wird (vom Controller) gesetzt, sobald das> letzte Bit den Puffer verlassen hat und kein neues im UDR steht.
Eben, und um auf das Setzen durch die Hardware warten zu können, muss er
das Flag ja erstmal selber löschen.
@ Joe:
Die Werte sehen für mich nach ziemlichen Müll aus. In welchem zeitlichen
Rahmen spielt sich das ab? Bist du wirklich sicher, dass die Zeit
zwischen 2 steigenden Flanken auf jeden Fall kleiner ist, wie der Timer
für einen kompletten Durchlauf braucht? Konfiguriere den Timer mal mit
einem Prescaler (sagen wir 8), und zeige dann bitte nochmal die Werte.
1
Bloopcounter=1;
2
...
3
for(I=0;I<11;I++)
Fülle das Array bitte von 0 an, und gib dann nur bis 9 (<10) aus. Du
gibst momentan 11 Werte aus, von denen aber nur 8 verwertbar sind.
Stefan schrieb:
> Bist du wirklich sicher, dass die Zeit zwischen 2 steigenden> Flanken auf jeden Fall kleiner ist, wie der Timer> für einen kompletten Durchlauf braucht?
Nein, sicher bin ich mir nicht, habe mich nur an den Basic-Code
gehalten.
Ich habe das nun so in die Tat umgesetzt:
1
ISR(TIMER1_CAPT_vect)
2
{
3
Wcapture=ICR1;// ICR1-Zeit nach Wcapture speichern
4
Array[Bloopcounter]=Wcapture-Wcapturealt;// Zeitdifferenz berechnen und im Array speichern
5
Wcapturealt=Wcapture;// aktuelle ICR1-Zeit wird alte Zeit zur Berechnung
6
Bloopcounter++;// Zähler erhöhen
7
8
if(Bloopcounter==10)// wenn bis 11 gezählt...
9
{
10
NeueDaten=TRUE;// ...Job-Flag setzen...
11
Bloopcounter=0;// ...Zähler auf 1 setzen...
12
INTERRUPTaus;// und Interrupts vom Timer ausschalten
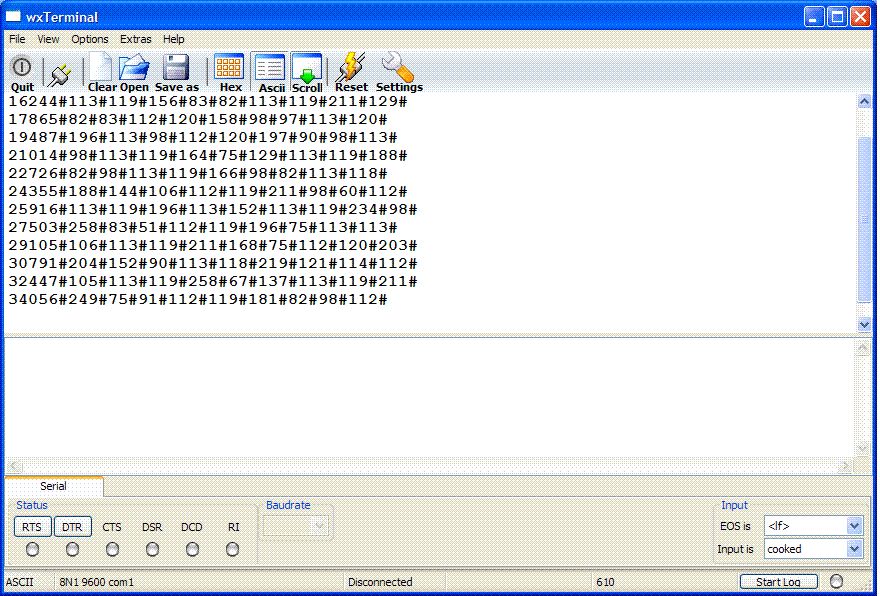
Irgendwie scheinst du Recht zu haben, das hat was mit dem Vorteiler zu
tun, denn wenn ich den Vorteiler auf 1024 stelle, kommt das raus, was du
im Anhang sehen kannst (kleinere Zahlen sind übersichtlicher).
Ich finde aber noch keinen Bezug zum Zyklus vom UTI, der in der PDF der
angehängten ZIP in einem von meinen letztens Posts zu sehen ist.
Der Wert von Array[0] kann ja nicht stimmen, insofern passt das schon
mal.
Doch, das Muster schimmert durch. Z.B. die 2. Zeile, 82 + 83 sind Phase
1, und dann sind 98 + 97 Phase 1 vom nächsten Zyklus. In manchen Zeilen
sind die Werte aber so am schwanken, dass man nur raten kann, was da die
Phase-1-Werte sind (z.B. in der Vorletzten). Ist am UTI überhaupt etwas
angeschlossen?
Stefan Ernst schrieb:
> Ist am UTI überhaupt etwas angeschlossen?
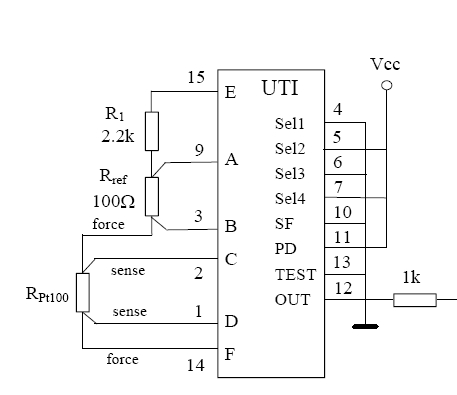
Ja, am UTI ist ein PT100 angeschlossen. Habe mal ein Anschlussbild davon
hier angehängt. Ich habe aber nur ein PT100 mit zwei Anschlüssen, darum
habe ich die Anschlüsse direkt am PT100 gebrückt. Also im Grunde B mit C
und D mit F.
So steht das auch in der apputi03.pdf.
Habe probeweise das PT100 abgeklemmt und musste feststellen, dass sich
an den Zeiten nichts ändert, nur die Ausgabe kommt verzögerter.
Schließe ich das PT100 wieder an, läuft auch die Ausgabe schneller.
Wenn ich _delay_ms(200); auskommentiere, bringt das auch nichts.
Meinst du, am UTI ist was faul?
Joe schrieb:
> Meinst du, am UTI ist was faul?
<off topic>
Ich habe mein sowieso noch nie verstanden, wozu man dieses Teil
überhaupt braucht. PTC direkt an den ADC ist doch viel simpler. Und wenn
der Sensor tatsächlich weit, weit weg ist, dann spendier ich dem Sensor
einen Tiny und überlge mir eine Übertragung per RS232/SPI/I2C/TWI oder
was auch immer angemessen ist.
Aber das Rumgewurschtel mit einer Pulslängencodierung, bei der der
kleinste Wert den Datensatz-Anfang markiert .... brrrr. Da läuft es mir
kalt runter.
Kann natürlich auch sein, dass es ein extrem gutes Argument für so einen
UTI gibt, das ich nicht sehe.
</off topic>
<off topic>
Karl heinz Buchegger schrieb:
> Ich habe mein sowieso noch nie verstanden, wozu man dieses Teil> überhaupt braucht. PTC direkt an den ADC [...] der kleinste Wert> den Datensatz-Anfang markiert .... brrrr. Da läuft es mir> kalt runter.
Ja, da stimme ich dir zu. Da ich aber ein fertig kalibriertes Bauteil
einsetzen wollte, entschied ich mich für den UTI. Wollte auch mal sehen,
wie das dann so in der Industrie umgesetzt wird, denn bei uns sind auch
einige UTI's auf Steckplatinen verbaut.
Ich habe mich immer gewundert, warum die industrielle Messtechnik so
teuer ist. Mittlerweile weiß ich es, denn wenn die Fehlerauswertung bei
der Herstellerfirma genau so lange dauert, ist es klar, dass die
Techniker auch bezahlt werden möchten, was den Preis natürlich
unbezahlbar in die Höhe treibt! ironie
Karl heinz Buchegger schrieb:
> Kann natürlich auch sein, dass es ein extrem gutes Argument> für so einen UTI gibt, das ich nicht sehe.
Ein Pro-Argument: Nur ein Bauteil, das fertig für die verschiedensten
Messungen kalibiert ist.
Nachteil: Total besch**** Produktunterstützung, auch seitens des
Herstellers. Hab mal nach einem C-Code für die AVR's gefragt, gibt's
nicht.
</off topic>
@Stefan:
Nun habe ich nochmals die Anschlüsse vom UTI kontrolliert und siehe da,
es passt alles. Wenn ich nun die Widerstandswerte einzeln an den Pins
des UTI messe, komme ich zu folgendem Ergebnis:
E nach A: 2,2kOhm
E nach B: 2,3kOhm
E nach C: 2,3kOhm
E nach D: 2,412kOhm
E nach F: 2,412kOhm
A nach B: 100Ohm
A nach D: 212Ohm
A nach F: 212Ohm
B nach D: 112Ohm
B nach F: 112Ohm
C nach D: 112Ohm
C nach F: 112Ohm
So, wenn ich das PT100 nicht anstöpsle, sind nur nur Anschlüsse E, A, B
belegt.
Das PT100 hab ich direkt gebrückt (weil 2-Leiter) und nicht auf der
Platine bzw. am UTI mit den Anschlüssen B-C und D-F.
Wenn ich mit meinem Widerstandsmessgerät direkt das PT100 auslese und
dabei erwärme, steigt der Wert von 1120Ohm auf 114Ohm und höher. Lass
ich das PT100 abkühlen, fällt auch der Widerstandswert.
Warum schafft das mein supergünstiges Widerstandsmessgerät vom großen C?
Ich habe mir auch mal das Ausganssignal vom UTI angeguckt. Wenn das
PT100 nicht angeklemmt ist, kann man die zwei kürzesten Phasen erkennen,
aber sobald das PT100 angeklemmt ist, kommt nur noch Mist raus.
Irgendwas muss doch mit dem UTI sein...
So langsam glaube ich, ich besorge mir eine kleine Konstantstromquelle
und lese den widerstandsabhängigen Spannungswert vom PT100 ein... Mich
kotzt das UTI-IC echt an.
Nebenbei bemerkt, beim PT100 muss es bleiben, das ist eine
Voraussetzung, die ich mir gestellt habe. Schließlich habe ich auf der
Arbeit genug mit diesen Temperaturelementen zu tun und möchte auch damit
arbeiten.




{kind=link}
{kind=link}
{kind=link}