

Hallo,
ich habe folgendes Problem.
Ich habe serielle LVDS Daten (8bit), die ich mittels eines
Schieberegsiters parallelisiere. Das klappt so alleine wunderbar in der
Simulation (SR_solo.png). Also die erste '1' wird auf Bit 0 des SRs
eingelesen und geschiftet, alle weiteren Daten werden korrekt eingelesen
und bei Full = '1' können sie dann ausgelesen werden.
Nun möchte ich aber die Daten auf der steigenden und fallenden Flanke
des Taktes auslesen. Dazu verwende ich ein IDDR2, welches mittels eines
DCM getaktet ist. Die Ausgänge Q0 und Q1 gehen jeweils auf zwei
getrennte Schieberegister. Aber hier übernimmt das SR statt der '1' am
Anfang eine '0' und dadurch stimmt die Ausgabe nicht mehr.
Ich habe nun testweise den Datenzweig der fallenden Flanke deaktiviert
und will wie zuvor auch nur die Daten der steigenden Flanke auslesen.
Diese Daten stammen aber diesmal von einem IDDR2, Ausgang Q0.
In dieser Konstellation tritt der Fehler auch auf... statt einer '1'
wird eine '0' im ersten Takt auf Bit 0 des SRs gelesen. Auch folgende
Takte stimmen teilweise nicht überein mit dem, was ich erwarte beim
Dateneinlesen (SR_IDDR2.png).
Wo genau kann der Fehler liegen, wenn das Schieberegister wunderbar
funktioniert, aber sobald ein IDDR2 dazwischen geschaltet wird, die
Eingabe in das SR fehlerhaft ist? Muss ich in dem Zusammenhang noch
etwas beachten?
Ich habe meine Quellen incl. der beiden Testbenches mit angehängt,
vielleicht hilft es bei der Fehlersuche?!
TOPFILE.zip
|---TOPFILE.vhd => tb_TOPFILE_IDDR2.vhd
|--DIFF_CLOCK_IN.vhd
|--DIFF_DATA_IN.vhd
|--schiebereg.vhd => tb_schiebreg8bit.vhd
VIELEN DANK!!
Angehängte Dateien:
-

SR_solo.png
4,1 KB -

SR_IDDR2.png
4,4 KB
Ich habe gerade gesehen, dass das zweite SR, was ich aktuell noch auskommentiert hatte, funktioniert. Auch zusammen mit dem IDDR2. Sie fallende Flanke funktioniert also, nur die steigende macht Probleme...
1 | library IEEE; |
2 | use IEEE.STD_LOGIC_1164.ALL; |
3 | use IEEE.STD_LOGIC_ARITH.ALL; |
4 | use IEEE.STD_LOGIC_UNSIGNED.ALL; |
5 | library UNISIM; |
6 | use UNISIM.VComponents.all; |
7 | |
8 | |
9 | entity S2P_1laneDATA is |
10 | Port ( CLOCK_IN_P : in STD_LOGIC; --LVDS Takt |
11 | CLOCK_IN_N : in STD_LOGIC; --LVDS Takt |
12 | RESET : in STD_LOGIC; --Schieberegister Reset |
13 | RESET_DCM : in STD_LOGIC; --DCM Reset |
14 | FULL_ris : out std_logic; --schieberegister mit 8bit geladen |
15 | FULL_fal : out std_logic; --schieberegister mit 8bit geladen |
16 | DATA_IN_P : in STD_LOGIC; --serielle Daten Eingang |
17 | DATA_IN_N : in STD_LOGIC; --serielle Daten Eingang |
18 | DATA_OUT_ris : out STD_LOGIC_VECTOR (7 downto 0); --parallele Daten Ausgang steigende Flanke |
19 | DATA_OUT_fal : out STD_LOGIC_VECTOR (7 downto 0); --parallele Daten Ausgang fallende Flanke |
20 | SET_IDDR2 : in STD_LOGIC |
21 | );
|
22 | end S2P_1laneDATA; |
23 | |
24 | architecture Behavioral of S2P_1laneDATA is |
25 | |
26 | COMPONENT DIFF_CLOCK_IN |
27 | PORT( |
28 | CLKIN_N_IN : IN std_logic; |
29 | CLKIN_P_IN : IN std_logic; |
30 | RST_IN : IN std_logic; |
31 | CLKIN_IBUFGDS_OUT : OUT std_logic; |
32 | CLK0_OUT : OUT std_logic; |
33 | CLK180_OUT : OUT std_logic; |
34 | LOCKED_OUT : OUT std_logic |
35 | );
|
36 | END COMPONENT; |
37 | |
38 | COMPONENT DIFF_DATA_IN |
39 | PORT( |
40 | DATA_N : IN std_logic; |
41 | DATA_P : IN std_logic; |
42 | DATA_OUT : OUT std_logic |
43 | );
|
44 | END COMPONENT; |
45 | |
46 | COMPONENT schiebereg8bit |
47 | PORT( |
48 | CLOCK_SR : IN std_logic; |
49 | RESET_SR : IN std_logic; |
50 | DATA_IN_SR : IN std_logic; |
51 | FULL : OUT std_logic; |
52 | DATA_OUT_SR : OUT std_logic_vector(7 downto 0) |
53 | );
|
54 | END COMPONENT; |
55 | |
56 | signal CLOCK_IN_DCM0 : STD_LOGIC; |
57 | signal CLOCK_IN_DCM180 : STD_LOGIC; |
58 | signal DCM_DIFF_LOCK : STD_LOGIC; |
59 | signal CLOCK_IN : STD_LOGIC; |
60 | signal DATA_IN : STD_LOGIC; |
61 | signal DATA_IN_ris : STD_LOGIC; |
62 | signal DATA_IN_fal : STD_LOGIC; |
63 | signal DATA_READ_EN_ris : STD_LOGIC; |
64 | signal DATA_READ_EN_fal : STD_LOGIC; |
65 | signal DATA_OUT_INT_ris : STD_LOGIC_VECTOR (7 downto 0); |
66 | signal DATA_OUT_INT_fal : STD_LOGIC_VECTOR (7 downto 0); |
67 | |
68 | constant IDDR2_CE : STD_LOGIC := '1'; |
69 | |
70 | begin
|
71 | |
72 | Inst_DIFF_CLOCK_IN: DIFF_CLOCK_IN PORT MAP( |
73 | CLKIN_N_IN => CLOCK_IN_N, |
74 | CLKIN_P_IN => CLOCK_IN_P, |
75 | RST_IN => RESET_DCM, |
76 | CLKIN_IBUFGDS_OUT => CLOCK_IN, |
77 | CLK0_OUT => CLOCK_IN_DCM0, |
78 | CLK180_OUT => CLOCK_IN_DCM180, |
79 | LOCKED_OUT => DCM_DIFF_LOCK |
80 | );
|
81 | |
82 | Inst_DIFF_DATA_IN: DIFF_DATA_IN PORT MAP( |
83 | DATA_OUT => DATA_IN, |
84 | DATA_N => DATA_IN_N, |
85 | DATA_P => DATA_IN_P |
86 | );
|
87 | |
88 | IDDR2_inst : IDDR2 |
89 | generic map ( |
90 | DDR_ALIGNMENT => "NONE", -- Sets output alignment |
91 | -- to "NONE", "C0" or "C1"
|
92 | INIT_Q0 => '0', -- Sets initial state of the Q0 |
93 | -- output to ?0? or ?1?
|
94 | INIT_Q1 => '0', -- Sets initial state of the Q1 |
95 | -- output to ?0? or ?1?
|
96 | SRTYPE => "SYNC") -- Specifies "SYNC" or "ASYNC" |
97 | -- set/reset
|
98 | port map ( |
99 | Q0 => DATA_IN_ris, -- 1-bit output captured with C0 clock |
100 | Q1 => DATA_IN_fal, -- 1-bit output captured with C1 clock |
101 | C0 => CLOCK_IN_DCM0, -- 1-bit clock input |
102 | C1 => CLOCK_IN_DCM180, -- 1-bit clock input |
103 | CE => IDDR2_CE, -- 1-bit clock enable input |
104 | D => DATA_IN, -- 1-bit DDR data input |
105 | R => RESET, -- 1-bit reset input |
106 | S => SET_IDDR2 -- 1-bit set input |
107 | );
|
108 | |
109 | |
110 | Inst_schiebereg8bit1: schiebereg8bit PORT MAP( |
111 | CLOCK_SR => CLOCK_IN_DCM0, |
112 | RESET_SR => RESET, |
113 | DATA_IN_SR => DATA_IN_ris, |
114 | FULL => DATA_READ_EN_ris, |
115 | DATA_OUT_SR => DATA_OUT_INT_ris |
116 | );
|
117 | |
118 | Inst_schiebereg8bit2: schiebereg8bit PORT MAP( |
119 | CLOCK_SR => CLOCK_IN_DCM0, |
120 | RESET_SR => RESET, |
121 | DATA_IN_SR => DATA_IN_fal, |
122 | FULL => DATA_READ_EN_fal, |
123 | DATA_OUT_SR => DATA_OUT_INT_fal |
124 | );
|
125 | |
126 | READ_EN : process (RESET, DATA_READ_EN_ris, DATA_READ_EN_fal, DATA_OUT_INT_ris, DATA_OUT_INT_fal) |
127 | begin
|
128 | if (RESET = '1') then |
129 | DATA_OUT_ris <= (others => '0'); |
130 | elsif (DATA_READ_EN_ris = '1') then |
131 | DATA_OUT_ris <= DATA_OUT_INT_ris; |
132 | else
|
133 | DATA_OUT_ris <= (others => '0'); |
134 | end if; |
135 | |
136 | if (RESET = '1') then |
137 | DATA_OUT_fal <= (others => '0'); |
138 | elsif (DATA_READ_EN_fal = '1') then |
139 | DATA_OUT_fal <= DATA_OUT_INT_fal; |
140 | else
|
141 | DATA_OUT_fal <= (others => '0'); |
142 | end if; |
143 | |
144 | end process; |
145 | |
146 | FULL_ris <= DATA_READ_EN_ris; |
147 | FULL_fal <= DATA_READ_EN_fal; |
148 | |
149 | |
150 | end Behavioral; |
Ich denke ich habe den Fehler gefunden. Der IDDR2 erzeugt ein Delay im Datenzweig... der Takt ist laut Simulation 100ps eher da als die Daten und daher kann auch keine '1' übernommen werden. Nun ist wieder die Frage: Wie kann ich die Daten synchron zum Takt schalten? Kann ich den Takt irgendwie künstlich durch ein paar Gatter schicken, dass dieser die gleiche Laufzeit hat wie die Daten und beide wieder synchron am Eingang des SRs ankommen? DANKE!!!
Angehängte Dateien:
-

DCM.png
41 KB
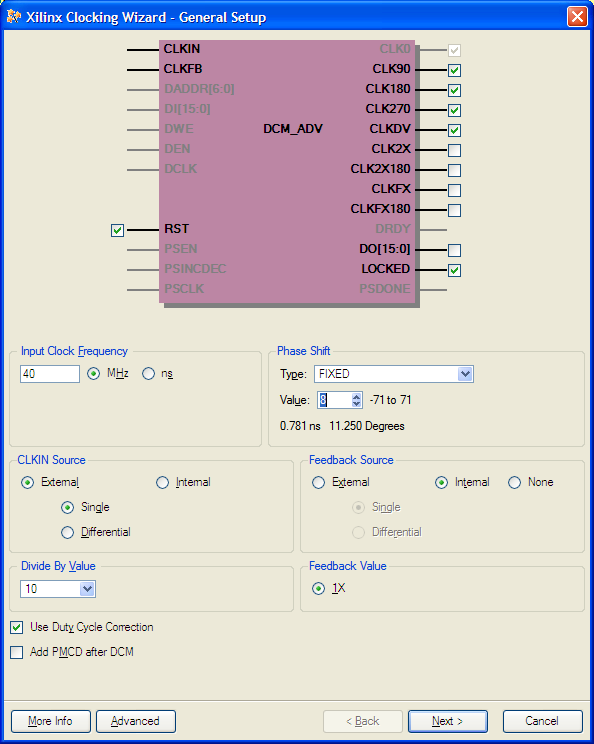
Für genau diesen Anwendungsfall gibts doch den DCM. Da kannst du die Phasenlage aller Ausgangstakte zum Eingangstakt nochmal ganz fein einstellen, im ps-Stufen. Siehe Bild -> Phase Shift In der Hardware kann das dann durchaus noch mehr als 100ps werden. Da musst du dann bestimmt nochmal am Delay drehen.
Ach na klar... oh mann... die einfachsten Lösungen sieht man nicht... Also stelle ich den Parameter CLKOUT_PHASE_SHIFT auf "FIXED", nur welcher Parameter legt fest, wie groß das Delay ist? Ich würde nur sehr ungern einen neuen IPCore einbinden. Den vorhandenen editieren wäre mir fast lieber. VIELEN DANK!!!
Na gut, du könntest auch das Datenblatt des DCM oder im User Guide lesen, aber "PHASE_SHIFT = 5" wäre zum Beispiel eine Einstellung. Ausrechnen, wieviel das ist, musst du aber selbst, die Formel steht im Datenblatt.
Hallo, Kann man dieses Delay denn auch simulieren? Ich habe nun doch einen neuen IP Core erzeugt und den VDHL Code kopiert und anschließend versucht zu simulieren. Egal ob Phaseshift => 0 oder => 255, das Simulationsergebnis unterscheidet sich in keinster Weise. Auch im Größten Zoom ist kein Delay des DCM0 zum Eingangstakt sichtbar. Das hier ist der erzeigte Code, den Phaseshift Parameter habe ich dann wahlweise verändert, nur leider ohne Ergebnis:
1 | entity DIFF_CLOCK_IN is |
2 | port ( CLKIN_N_IN : in std_logic; |
3 | CLKIN_P_IN : in std_logic; |
4 | RST_IN : in std_logic; |
5 | CLKIN_IBUFGDS_OUT : out std_logic; |
6 | CLK0_OUT : out std_logic; |
7 | CLK180_OUT : out std_logic; |
8 | LOCKED_OUT : out std_logic); |
9 | end DIFF_CLOCK_IN; |
10 | |
11 | architecture BEHAVIORAL of DIFF_CLOCK_IN is |
12 | signal CLKFB_IN : std_logic; |
13 | signal CLKIN_IBUFGDS : std_logic; |
14 | signal CLK0_BUF : std_logic; |
15 | signal CLK180_BUF : std_logic; |
16 | signal GND_BIT : std_logic; |
17 | begin
|
18 | GND_BIT <= '0'; |
19 | CLKIN_IBUFGDS_OUT <= CLKIN_IBUFGDS; |
20 | CLK0_OUT <= CLKFB_IN; |
21 | CLKIN_IBUFGDS_INST : IBUFGDS |
22 | port map (I=>CLKIN_P_IN, |
23 | IB=>CLKIN_N_IN, |
24 | O=>CLKIN_IBUFGDS); |
25 | |
26 | CLK0_BUFG_INST : BUFG |
27 | port map (I=>CLK0_BUF, |
28 | O=>CLKFB_IN); |
29 | |
30 | CLK180_BUFG_INST : BUFG |
31 | port map (I=>CLK180_BUF, |
32 | O=>CLK180_OUT); |
33 | |
34 | DCM_SP_INST : DCM_SP |
35 | generic map( CLK_FEEDBACK => "1X", |
36 | CLKDV_DIVIDE => 2.0, |
37 | CLKFX_DIVIDE => 1, |
38 | CLKFX_MULTIPLY => 4, |
39 | CLKIN_DIVIDE_BY_2 => FALSE, |
40 | CLKIN_PERIOD => 6.250, |
41 | CLKOUT_PHASE_SHIFT => "FIXED", |
42 | DESKEW_ADJUST => "SYSTEM_SYNCHRONOUS", |
43 | DFS_FREQUENCY_MODE => "LOW", |
44 | DLL_FREQUENCY_MODE => "LOW", |
45 | DUTY_CYCLE_CORRECTION => TRUE, |
46 | FACTORY_JF => x"C080", |
47 | PHASE_SHIFT => 128, |
48 | STARTUP_WAIT => FALSE) |
49 | port map (CLKFB=>CLKFB_IN, |
50 | CLKIN=>CLKIN_IBUFGDS, |
51 | DSSEN=>GND_BIT, |
52 | PSCLK=>GND_BIT, |
53 | PSEN=>GND_BIT, |
54 | PSINCDEC=>GND_BIT, |
55 | RST=>RST_IN, |
56 | CLKDV=>open, |
57 | CLKFX=>open, |
58 | CLKFX180=>open, |
59 | CLK0=>CLK0_BUF, |
60 | CLK2X=>open, |
61 | CLK2X180=>open, |
62 | CLK90=>open, |
63 | CLK180=>CLK180_BUF, |
64 | CLK270=>open, |
65 | LOCKED=>LOCKED_OUT, |
66 | PSDONE=>open, |
67 | STATUS=>open); |
68 | |
69 | end BEHAVIORAL; |
VIELEN, VIELEN DANK!!!
Ja kann man simulieren. Dazu muss die Simulations-Auflösung aber 1ps oder kleiner sein. Ich konnte den DCM bisher immer in der Simulation benutzen, allerdings instanziiere ich immer nur den Core, den der Core-Generator ausspuckt. Das machts übersichtlicher.
Hab es jetz genauso gelöst, hab den Core direkt eingebunden. So kann man ja auch recht einfach direkt über den Wizzard das Delay einstellen. Nur leider kann ich kein Delay erzeugen. Der Versatz zwischen Daten und Clock bleibt unverändert bei 100ps... keine Chance daran zu rütteln und das Design zu ner vernünftigen Funktion zu bewegen. Im Modelsim kann ich bis zu einem Abstand von 1ps zoomen, also an der Auflösung sollte es nicht liegen. Zumal ich nun testweise das Delay auf 2ns gestellt habe. Leider keine Veränderung :(
@Andreas B.:
>Im Modelsim kann ich bis zu einem Abstand von 1ps zoomen,
Das reicht nicht.
Du mußt die Auflösung beim Simulieren anpassen:1 | vsim -t ps ... |
Duke
In der .fdo Datei steht schon folgendes drin: vsim -t 1ps -lib work tb_TOPFILE_DCM_DELAY Reicht das aus, oder wie verwende ich den Befehl? Hab ihn gerade versucht im mehreren Varianten einzugeben, leider resultiert bisher jeder Versuch in einer Fehlermeldung. Ich starte das Modelsim direkt aus dem ISE... DANKE
@Andreas B: Sieht eigentlich gut aus. Wie lautet denn die Fehlermaldung? Laß mal die Zahl vor der Einheit weg:
1 | vsim -t ps -lib work tb_TOPFILE_DCM_DELAY |
Duke
vsim -t ps -lib work tb_TOPFILE_DCM_DELAY
damit macht er was, hatte ich vorhin schon einmal probiert.
Nur leider verschwinden dann meine Simulationsergebnisse (Kurven) und
ich habe ihm bis jetzt noch nicht beibringen können, wieder erneut zu
starten.
weder "restart" noch "run 100000" bewirken etwas.
Wenn ich erneut "do {tb_TOPFILE_DCM_DELAY.fdo}" eingebe, wie von ISE
ganz am Anfang einer jeden Simulation, wird scheinbar alles wieder
zurückgesetzt und die einstellungen von vsim -t gehen wieder verloren.
Zumindest unterscheidet sich das Simulationsergebniss nicht von dem
davor... sofern die Auflösung der Grund für das nicht wirkende Delay des
DCM ist...
VIELEN DANK!
Naja, die Voreinstellung bei Xilinx ist schon 1ps Auflösung beim Start der Simulation. Aber um diesem allen aus dem Weg zu gehen, kommst du eventuell besser, wenn du dir im ModelSim eigene Projekte anlegst dafür. Das ist viel bequemer. Dann ein .do File, in dem die Befehle für die Simulation stehen: vsim ... add wave * run 10000 ns usw.
Also das bedeutet so viel, wie es liegt nicht an der Auflösung, dass die 100ps Delay weiterhin bestehen und ich meinen Ausgangstakt vom DCM nicht verzögern kann. Das ist weniger gut. Ich hatte gehofft, dass es nur noch eine Einstellungssache ist. Auch wenn ich den DCM stand-alone simuliere und Eingangstakt und Ausgangstakt vergleiche, sind diese identisch trotz eingestelltem Delay... ich verstehs nicht :( Aber ohne diese Verzögerung kann ich zwar schauen, dass mein Design was auswirft, aber inwieweit sinnvoll das ist, kann ich dann nicht mehr beurteilen, wenn meine Daten schon falsch eingelesen werden. Somit kann ich nicht mal die logische Funktion nachweisen und muss mich dann dazu in der realen Hardware noch mit Timingsachen rumschlagen... eine schlechte Kombination. Ich hoffe ich finde noch eine Lösung. Ich werde es mal mit einem komplett neuen Projekt versuchen, in dem ich einfach nur den DCM simuliere, ohne irgendetwas drum herum. MfG
Angehängte Dateien:
-

DCM_Delay.png
791 Bytes

Als einzelner Core, aufgerufen in einem eigenen Topfile in einem eigenen Projekt funktioniert die Verzögerung des Ausgangstaktes auch nicht :(
Könnte es was damit zu tun haben?
1 | # WARNING: No extended dataflow License exists |
Sind denn die Simulationsmodelle aktuell? Da gibts ja immer mal neue von Xilinx. Es gab gerade beim DCM mal Probleme, da ging z.B. das LOCK nie auf 1. Edit: Ich habs eben mal getestet. Du hast einen Spartan 3e, stimmts? Da scheint die Simulations-Lib einen Bug zu haben, da gehts tatsächlich nicht (wohl aber in Hardware). Ich hatte das bisher am Virtex 4 benutzt, und da klappts auch in der Simulation bestens. Ich weiß nicht, ob die aktuellen Libs von Modelsim XE 6.4b zur ISE 11.3 das beheben, kann sein. Ich arbeite noch mit 6.3c
Ich habe einen Spartan 3A DSP XC3SD1800A-4FGG676C... bzw. das Starterkit dazu. Ich teste den einfachen DCM einfach mal in der Hardware und versuche es zu messen... ich hoffe, dass ich hier in einem anderen Labor ein passendes Oszi auftreiben kann.
Also ich kann es leider nicht genau messen. Das Oszi was ich gefunden habe kann zwar angeblich 500MHz bei 5GT/s, aber naja... wenn ich die Messspitzen anders anfasse, sehen die Kurven anders aus. MIt 160MHz ist eben nicht zu scherzen, wenn man dann noch 1-3ns auflösen will. Könnte eine ChipScope Lizenz die ganze Sache bereinigen bzw. Licht ins Dunkel bringen, was der DCM in der Hardware macht? Die kostenlose Version von CS wird bei mir leider nicht fehlerfrei installiert und somit habe ich auch nicht die Auswahl, unter New Source einen CS Core zu implementieren.
ChipScope kann nur taktsynchron sampeln. Das bringt dir nix weiter. Klappt denn der Receiver in der Hardware auch nicht? Eventuell kommst du mit Constraints weiter, also mit "OFFSET IN BEFORE" dem ISE sagen, dass die Daten da x ns vor dem Takt anliegen müssen.
Ok, also ist ChipScope der falsche Weg. Der Reciever in der Hardware funktioniert. Also der DCM spuckt am Ausgang einen Takt aus, nur leider kann ich nicht exakt nachmessen, ob nun wirklich das parametrierte Delay eingehalten wird, da mir die Lokalisierung der steigenden und fallenden Flanken schwer fällt. Die Signale sind schon sehr verwaschen und alles andere als ein sauberes Rechteck (ist ja auch nicht zu erwarten). Ich habe die LVDS Signale eher stiefmütterlich an das Starterkit geführt, ohne Terminierung und alles. Auf meiner eigenen Hardware habe ich es ordentlich gemacht. Impedanzen von 100Ohm eingehalten und auch dementsprechend terminiert. Aber die ist eben noch nicht fertig, so muss ich vorerst auf das Starterkit zurückgreifen. >Eventuell kommst du >mit Constraints weiter, also mit "OFFSET IN BEFORE" dem ISE sagen, dass >die Daten da x ns vor dem Takt anliegen müssen. Das bedeutet, dass ich den Datenkanälen ein constraint zuweise, dass diese Daten meinetwegen 1ns vor der Taktflanke anliegen müssen? Also wird dann bei der Implementierung dem Clock automatisch ein Delay verpasst? Die Variante schaue ich mir mal an. Nur könnte ich da dann nicht Probleme mit meinem IDDR2 bekommen? Die Daten kommen ja auf der fallenden und auf der steigenden Flanke des Taktes. Oder wird einfach eine komplette Phasenverschiebung des Taktes zu den Daten implementiert? Constraints werden doch aber erst in der realen Hardware aktiv, bei der Simulation habe ich dadurch keinen Vorteil, richtig? Vielen Dank!
Ich hab gerade das appnote wp237 gefunden. Ich denke da steht alles drin, was es mit dem OFFSET IN BEFORE zu tun hat und es ist auch ein Bsp. für DDR gegeben. Ich werde mich mal mit diesen Befehlen versuchen:
1 | NET "CLKIN_IN_N" TNM_NET = CLKIN_IN_N; |
2 | TIMESPEC TS_CLKIN_IN_N = PERIOD "CLKIN_IN_N" 6.25 ns HIGH 50%; |
3 | NET "CLKIN_IN_P" TNM_NET = CLKIN_IN_P; |
4 | TIMESPEC TS_CLKIN_IN_P = PERIOD "CLKIN_IN_P" 6.25 ns HIGH 50%; |
5 | |
6 | OFFSET = IN 1ns BEFORE CLKIN_IN_P; |
7 | OFFSET = IN -1ns BEFORE CLKIN_IN_P TIMEGRP falling_ffs_grp; |
Bei differentiellen Signalen sollte es ja ausreichen, auf den positiven Zweig Bezug zu nehmen, oder? MfG
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.