Guten Abend! hat schon einmal jemand von euch den LS (least square) oder rekursiven least square Algorithmus (Methode der kleinsten Quadrate) in C/C++ oder C# implementiet? Oder kennt einer eine Dll die diesen bereit stellt? Meine Aufgabe ist es eine Regelstrecke zu identifizieren. Ich habe eine ASCII Datei mit x-y-Werten. Diese habe ich eingelesen usw. doch den Algo. bekomme ich nicht ans laufen. Hat jemand eine Ahnung wie man sowas macht? Vielen Dank für eure Hilfe
Hallo Chris, hier bei Arndt-Bruenner gibt es solch eine Berechnung (Java-Script). http://www.arndt-bruenner.de/mathe/scripts/regr.htm Deine Wertepaare kannst du als Text mit Copy-Past eintragen. Werteanzahl nicht vergessen und deine "Wunschformel" wählen. Hoffe das past. avr
Guten Abend Chris, ich habe eine solche Identifikation mit einer PT2-Strecke ausprobiert. Allerdings bin ich mit LS nicht weiter gekommen. Denn die LS bringt Dir lediglich die Koeffizienten eines Polynoms raus, damit diese verglichen werden können, müssten alle Regelstreckenarten als Polynom vorliegen - Keine Ahnung, ob dies überhaupt funktioniert. Eine recht gute Lösung habe ich mit dem Levenberg Marquardt Algorithmus erreicht, dabei wird nämlich die zu vergleichende Funktion bereits im Vorfeld definiert: Beispiel: http://www.messen-und-deuten.de/lmfit/lmfit.html Aber grundsätzlich ist der Aufwand recht hoch, wenn Du eine unbekannte Regelstrecke hast. Du musst alle möglichen Funktionen definieren, die Koeffizienten bestimmen und dann die mit dem kleinsten Fehler auswählen. Hört sich einfacher an, als es ist - dennoch eine schöne Aufgabe. Gruß Volly
Hallo nochmal, ich habe gerade mal im Handbuch der Regelungstechnik nachgeschaut, es gibt doch eine Möglichkeit über das Polynom: Das Ganze nennt sich Parameterschätzverfahren von ARX-Modellen. Hierzu muss Du eine Messmatrix erstellen und die Pseudoinverse daraus, dann bekommst Du anscheinend die Parameter des Polynoms raus, die sollte auch mit Störgrößen funktionieren. Der Aufwand liegt eigentlich darin die Pseudo-Inverse zu berechnen. Gruß Volly
Danke für die Antworten die Grundstrucktur der Regelstrecke ist bekannte. Es geht wirklich darum die Parameter zu bestimmen. Das Beispiel aus dem Handbuch habe ich auch schon in Matlab ausprobiert. Es nutzt ja auch die Methode der kleinsten Quadrate. Es hat sich gezeigt, dass es nicht funktieniert wenn es z.b. mit einem Sinus statt Random Werten angeregt wird. Das Java Skript sieht schon gut aus ich versuche das beschriebene um zu setzen.
Angehängte Dateien:
-

ls_arx.png
4,5 KB
Hallo Chris,
ich habe mal die ARX auf Scilab getestet, und eigentlich funktioniert es
auch mit dem Sinus - es darf allerdings kein reiner Sinus sein, sondern
muss ein bisschen Rauschen haben.
Das Problem liegt wahrscheinlich in dem Lösen des Gleichungssystem mit
der Pseudoinversen Matrix, diesbezüglich existieren noch andere
Verfahren, die ich noch nicht geprüft habe.
Anbei mal der Scilab-Code (fast so wie Matlab).
Gruß
Volly
--
function u=ut(t), u=sin(50*t)+0.00001*rand();endfunction
s=poly(0,'s'); // definiert s als Polynomvariable
Z = 30-0.47407*s-27.36148*s*s;
N = 1-0.3155*s+5.44933*s*s;
t=0:0.001:0.2;
e=[];
for i=1:size(t,2)
e(i)=ut(t(i));
end
Gs=syslin('c',Z,N)
yk=csim(e',t,Gs);
N = size(t,2)-2;
n = 2;
m = 2;
nmp1 = n+m+1;
M = zeros(N,nmp1);
y = zeros(N,1);
for k1 = 1 : N
y(k1) = yk(k1+2);
end
for k1 = 1 : N
M(k1,1) = -yk(k1+1);
M(k1,2) = -yk(k1);
M(k1,3) = e(k1+2);
M(k1,4) = e(k1+1);
M(k1,5) = e(k1);
end
p = pinv(M) * y
Z = p(3)+p(4)*s+p(5)*s*s;
N = 1+p(1)*s+p(2)*s*s;
Gs=syslin('c',Z,N)
yk1=csim(e',t,Gs);
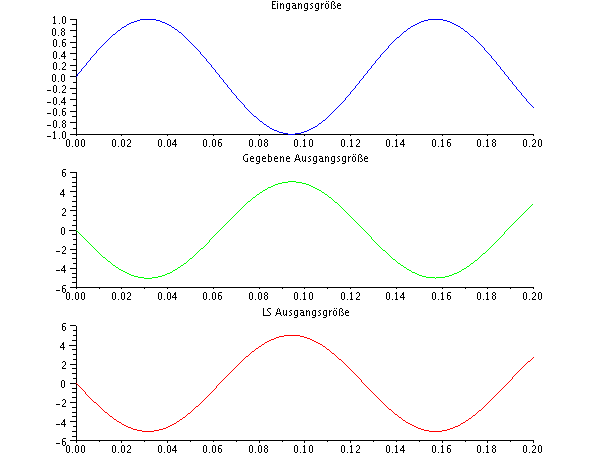
xbasc(0);
subplot(3,1,1)
xtitle("Eingangsgröße")
plot2d(t,[e],2)
subplot(3,1,2)
xtitle("Gegebene Ausgangsgröße")
plot2d(t,[yk'],3)
subplot(3,1,3)
xtitle("LS Ausgangsgröße")
plot2d(t,[yk1'],5)
Angehängte Dateien:
-

bode_original.png
2,7 KB -

bode_ls.png
3 KB
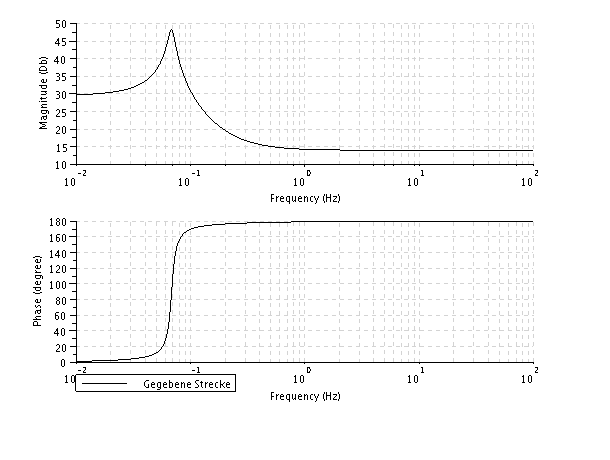
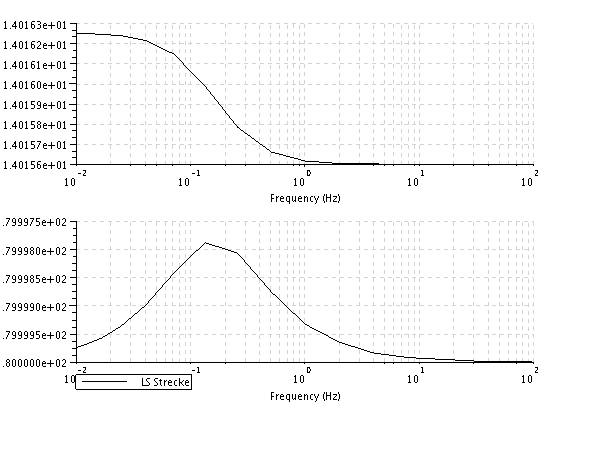
Hallo Chris, Du hattest doch Recht. Da die Parameter doch irgendwie unterschiedlich waren, habe ich mir mal die Bode-Diagramme berechnet - und die sind vollständig unterschiedlich. Gruß Volly
Hallo Volly, ich werde gleich mal eine Matlab funktion ausprobieren die ich hier gefunden habe: Beitrag "Matlab Sprungantwort Fitting" ich habe heute folgendes in Octave ausprobiert (werde es auch noch in Matlab testen): ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %Ident TEST Octave clear all T = 0.1; t = [ 0: T :10]; f = 1; uk = sin(2*pi*f*t); %uk = rand(1,length(t))*10; % Eingangssignal t = t'; uk = uk'; rk = rand(1,length(t))*0.5; % Störsignal (auskommentier) K = 5; T1 = 2; num = [K]; % b den = [T1,1]; %a0 a1 GS = tf(num, den); %sysout(GS); yk = lsim(GS,uk,t) ;%+ rk % Ausgangssignal uk = uk'; figure(1) subplot(211), plot(t,uk); subplot(212), plot(t,yk); N = length(uk) - 1 m = 1; % Ordnung des Systems d = 0; % Totzeit psi = zeros (N, m); % Meßmatrix y = zeros (N, 1); % Ausgangsgröße for i = 1:N y(i) = yk(m+d+i); %Belegung der Ausgangsgröße end for i = 1:N %Belegung der Meßmatrix %psi(i,1) = -yk(m+d+i-1); psi(i,1) = -yk(d+i); % a Nenner %psi(i,3) = uk(m+i-1); psi(i,2) = uk(i); % b Zähler end omega = pinv(psi) * y ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ Das hat aber auch nur mit ein paar Werten funktioniert. Ich habe mir das aus dem Taschenbuch Beispiel, und dem Buch "Identifikation Dynamischer Systeme" von Isermann zusammen gereimt. Melde mich morgen mit neuen Ergebnissen :-) Gruß Chris
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.