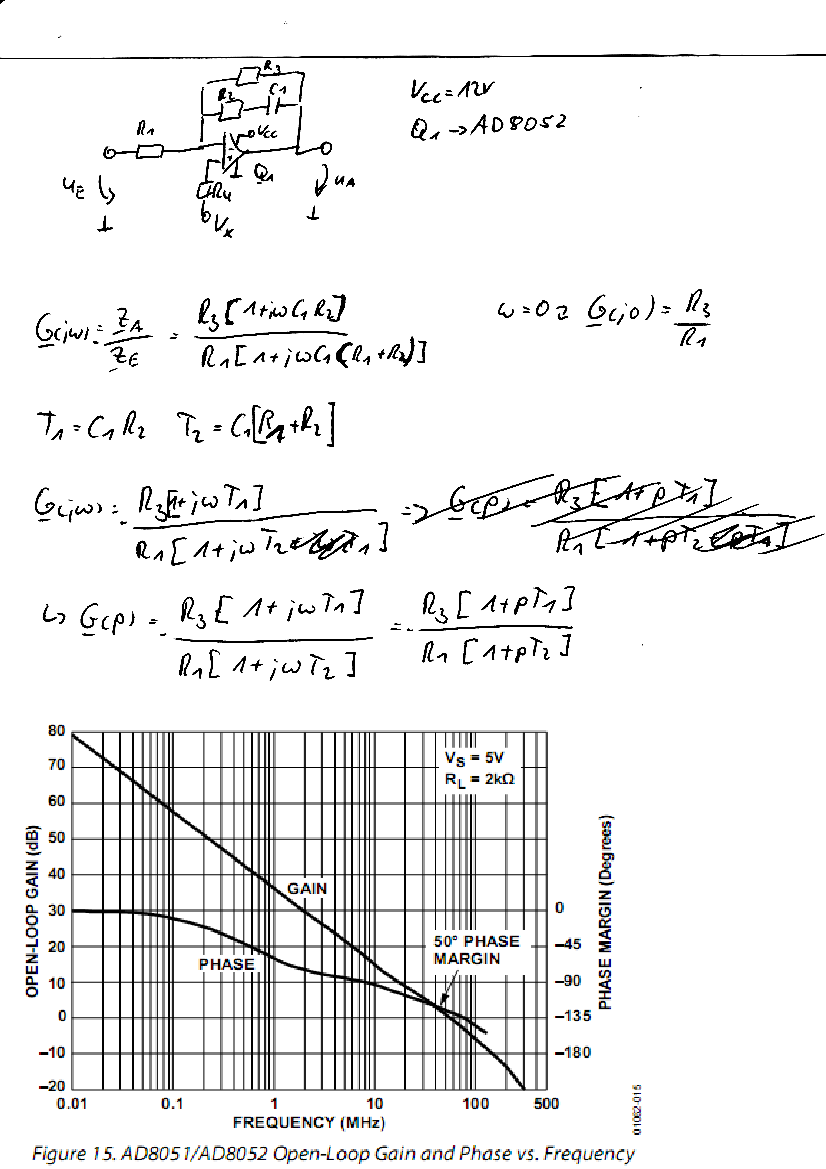
Hallo, ich möchte einen Pi Regler aufbauen. Am Reglerausgang ist ein FET, welcher als variabler Widerstand parallel zu einem Widerstand geschaltet ist. Vor dem Regler liegt ein INA118, welcher die Differenz zw. Sollwert und Istwert bildet. Anbei die Schaltung des PI Reglers. Die Übertragungsfunktion habe ich aufgestellt. Bei f=0 ist |G(jw)|= R3/R1. Nun kommen meine Fragen: Wie dimensioniere ich, damit er minimal überschwingt(der Regler) und nicht oszilliert (der OPV)? Laut Tietze&Schenk muss ich ihn so dimensionieren, dass ich eine Phasenreserve von 60° habe: Wenn ich richtig auf den DB Ausschnitt schaue, dann sind das ca fk = 30Mhz So und nun? Komme da nicht weiter, ich bin keine Regelungstechniker. Setzte ich jetzt einfach Werte an?: R1=10k; R3=100k |G(j0)| = 10 Nur wie geht es "sinnvoll" weiter? Laut T&S muss fi<<fk sein, nur welches ist jetzt fi? Weiterhin, wie groß ist R4? Trotzdem R3//R1 Regel nutzen? Wäre dankbar wenn mir da jmd helfen könnte. Danke im vorraus
Angehängte Dateien:
-

forum1.png
76 KB
Angehängte Dateien:
-

forum1.png
130 KB
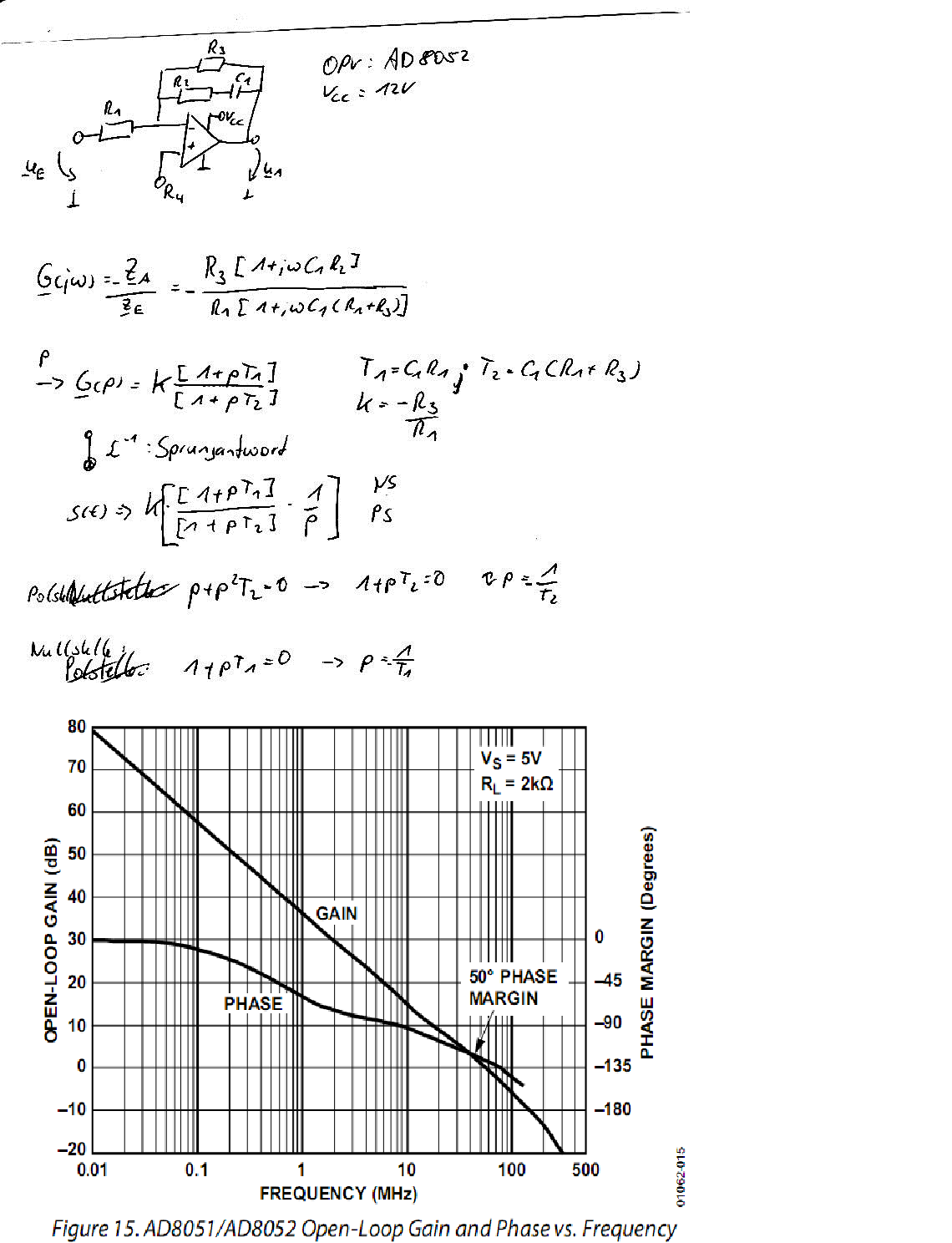
Sorry kleiner fehler in der Formel. Hier die richtige. Jetzt muss ich doch noch ne Laplace machen. Hm, lange her... Wie heisst die Transformierte Fkt in den Zeitbereich? mfg
ich kapier zwar weniger als ich hoffte, aber für die inverse laplace trafo gibt's n tool: http://www.wolframalpha.com/input/?i=inverse+laplace+1%2F%28s^2%2B1%29
Danke für den Link Armin. Was kapierst du an der Formel nicht? Ist da was falsch? Die formel die mir Mathematica ausspuckt, habe ich auch so per hand rausbekommen. Allerdings macht sie nicht wirklich Sinn.. Vlt doch ein Fehler in meiner Formelaufstellung?? Wer kann helfen? mfg
naja ich studier Maschinenbau an der Uni und da gibt's in der Regelungstechnik bisher keinerlei praktische Realisierungen. Wir gehen das Ganze recht theoretisch an - dementsprechend wenig Hilfreiches kann ich dir erzählen, da ich nicht weiß, ob der Regelkreis jetzt offen oder geschlossen ist, bzw was dein G jetzt bedeutet. Vermutlich mal die Übertragungsfunktion des offenen Kreises? Dein Regler ist aber geschlossen? Phasenreserve 60° und Amplitudenreserve 2 sind mal grundsätzlich Stabilitätskriterien des offenen Kreises. Das heißt sie geben an ab wann die Antwort des geschlossenen Kreises nicht mehr einem festen Wert zuläuft, falls es sprungangeregt wurde (Stichwort: Nyquist). Aber ist das meiner der selbe Grund für Phasenreserve wie deiner? Und was sind fi? fk? Da suchst du dir besser nen E-Techniker ^^ Zum PI-Regler: der hieß bei uns immer R(s) = K/s * (1 + T*s) Dann wählt man T als größte Streckenzeitkonstante. und hält Phasen- sowie Amplitudenreserve ein. Aber für das T musst du jetzt wissen, was der eigentlich regeln soll? bin wie gesagt kein E-Techniker und wir sind das nur theoretisch angegangen. Dein G mit (1+s*T1)/(1+s*T2) ist aber eher ein Lead/Lag-Glied, je nachdem, ob T1 > T2 oder umgekehrt. Zum Überschwingverhalten: wenn ich mich richtig erinnere, kann ein PI-Regler gar nicht überschwingen. Falls doch, musst du an dem T drehen. Und zwar: je größer du T (im Zähler!) wählst, desto langsamer wird der Regler, und desto weniger schwingt er. Eventuell gibt es aber auch da Grenzen... keine Ahnung. hoffe, du kannst zumindest irgendwas da rausholen ^^
Danke Armin, ich habe noch einen Fehler in meiner Formel gefunden... Noch einer .-) T2=C1*(R2+R3) somit auch die G(jw) bzw G(p) muss abgeändert werden. Ja, Deine Funktion des PI Reglers ist ja richtig, nur habe ich hier im Rückkoppelzwei den R3, welcher für die Gleichspannungsverstärkung rein muss beim OPV. Theoretisch hatten wir das auch in der FH, aber jetzt mit nem OPV.. ist was anderes. f_i <- 3dB Frequenz der äußeren Beschaltung (RC) f_k <- reale 3 dB Frequenz des Regler (OPV) wir können uns ja mal rantasten .-)
Also gut, ich steh mit opvs ziemlich auf Kriegsfuß, also interpretiere ich deine Aussage einfach - ohne was davon zu verstehen - als "Der Regler muss Lead/Lag-Form haben". Er soll sich aber wie ein PI-Regler verhalten. R(s) = K (1 + s*T1)/(1 + s*T2) um dem PI-Regler möglichst nahe zu kommen, muss man das 1+ im Nenner wegbekommen. Das geht, indem T2 möglichst groß gewählt (und K angepasst) wird. Es bleiben also folgende Kriterien: - T1 ungefähr zur größten Streckenzeitkonstante des zu regelnden Systems wählen - wird zu langsam geregelt, T1 verkleinern; gibt es zu viele Überschwinger, T1 vergrößern - T2 groß machen, um möglichst nahe an einen PI-Regler zu kommen. Dabei unter Umständen im selben Maß K vergrößern. - Phasenreserve so gut es geht einhalten - Amplitudenreserve so gut es geht einhalten Was ist eine 3dB-Frequenz? Vielleicht genau das, was ich unter "Amplitudenreserve von 2" verstehe?: Der offene Kreis sollte im Arbeitsbereich keine Verstärkung über -3dB (=0.5) produzieren, damit der geschlossene Regelkreis sicher stabil ist. Es gibt sicher noch weitere Grenzen, durch böse Effekte, Rauschen, etc. kA, denen man begegnen kann. Etwa, wenn man das "T2 groß machen" übertreibt. Einfach mal ausprobieren ^^
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.