Sagt mal. ich rechne ja bei einem P Regler den Panteil so aus Kp.*e und bei nem I Regler den Ianteil so: integral e / Tn. Warum wird denn bei einem PI Regler nicht der Gesamtanteil so ausgerechnet: Gesamt: Kp*e + integral e / Tn sondern: Gesamt = Kp (e + integral e / Tn) ??????
Hardware Interrupt schrieb:
> sondern: Gesamt = Kp (e + integral e / Tn) ??????
Wo hast du denn das her?
Ich denke du klebst hier zu sehr am einzelnen Buchstaben.
Entscheidend ist doch die Idee des Reglers.
es gibt einen Proportionalanteil
d.h. der Fehlerwert (geeignet skaliert) ergibt direkt
(proportional) die Stellgröße
es gibt einen Integralanteil
d.h. das Integral über den Fehler (geeignet skaliert) modifiziert
ebenfalls die Stellgröße. Die Idee dahinter: Je länger eine Abweichung
vorhanden ist, desto stärker wird nachgeregelt. Oder anders
ausgedrückt: Man schlägt bei einem Auto in der Kurve das Lenkrad
stärker ein, wenn man bemerkt, dass man sich von der Ideallinie
immer weiter entfernt.
Darüber, was nun im jeweiligen Zusammenhang 'geeignet skaliert'
bedeutet, kann man geteilter Meinung sein und da darf jeder mehr oder
weniger sein eigenes Süppchen kochen, solange nur der prinzipielle
Zusammenhang gegeben ist.
naja meine Frage ist einfach nur diese, wenn ich einen normalen i regler habe, dan integriere ich ja einfach die regelabweichtung und bei nem P Regler, kommt auch in der Berechnung des I Anteils das Kp mit ins spiel. warum?
Hardware Interrupt schrieb: > naja meine Frage ist einfach nur diese, wenn ich einen normalen i regler > habe, dan integriere ich ja einfach die regelabweichtung und bei nem P > Regler, kommt auch in der Berechnung des I Anteils das Kp mit ins spiel. > warum? Weil das der Autor, bei dem du abgeschrieben hast, als 'geeigent skaliert' empfunden hat? Ich kenne das zb so, dass es ein Kp, ein Kd (für den D-Anteil) und ein Ki (für den I-Anteil) gibt. Jetzt kann man natürlich auch noch die Mathemuskel spielen lassen, und das Ki über irgendeine Umrechnung (zb über das Tn) in ein Kp überführen. Aber letztendes sind das doch alles nur Faktoren, die mit der Regelabweichung (oder deren Differential bzw. Integral) multipliziert werden, um sie 'geeignet zu skalieren'. Letztenendes bleibt doch für einen PID übrig y = Kp*e + Kd*diff(e) + Ki*integral(e) Die Abstimmung des Reglers ergibt sich durch die Wahl von Kp, Kd und Ki. In diesen Zahlenwerten steckt alles andere drinnen.
So sieht das hier aber nicht aus. und wo steht es in jedem Reglungstechnik Buch Quelle hier von Wikipedia. http://www.schmidt-ahrdt.de/Benny/PID.png hier ist überall Kp drin. wieso Also das Ki = Kp /Tn ist ist ja klar, aber warum ird es überhaupt mit rein gerechnet?
Hardware Interrupt schrieb: > hier ist überall Kp drin. wieso Also das Ki = Kp /Tn ist ist ja klar, > aber warum ird es überhaupt mit rein gerechnet? Du hast noch nie einen Regler eingestellt, stimmts :-) Das Ki steckt doch hier im Grunde im Tn drinnen. Mit dem Zusatz, dass Ki auch erhöht wird, wenn Kp erhöht wird. Aber stell den Regler in der Praxis ein. Dann wirst du feststellen: Grau ist alle Theorie. Und du wirst froh darüber sein, wenn die jeden Anteil getrennt von 0 bis zu irgendeinem Vielfachen des Integrals einstellen kannst.
Genau das it ja meine Frage. Es geht mir nur um das verständnis der rechnung, also nochmal. wenn ich ja einen I Regler alleine habe, dann kommt da ja nu Tn und das integral e drin vor. warum kommt also in der berechnung des i anteiles eines PI reglers ein Kp drin vor?
Hardware Interrupt schrieb: > Genau das it ja meine Frage. > Es geht mir nur um das verständnis der rechnung, also nochmal. wenn ich > ja einen I Regler alleine habe, dann kommt da ja nu Tn und das integral > e drin vor. warum kommt also in der berechnung des i anteiles eines PI > reglers ein Kp drin vor? Das weiß ich auch nicht genau. Ich denke aber das hat mit der Betrachtung des Aufbaus aus Parallel-Struktur bzw. Parallel-Reihenstruktur zu tun. Hier zb http://www.rn-wissen.de/index.php/Regelungstechnik#PI-Regler kommt das alles gar nicht vor.
aber wenn ich doch p und i parallelschalte, dann bekomme ich doch p regler mal e + i geler mal e. und nich p mal e plus p mal i mal e oder?
Die in der Theorie uebliche Notation wird zwar immer wieder abgeschrieben, wird aber deswegen nicht besser. Eine Division macht eh keinen Sinn. Mach einfach y = Kp*e + Kd*diff(e) + Ki*integral(e), wobei die Kp, Ki, Kd bevorzugt Ganzzahlen sind. Man kann ja am Schluss wieder skalieren.
Hardware Interrupt schrieb: > aber wenn ich doch p und i parallelschalte, dann bekomme ich doch p > regler mal e + i geler mal e. > > und nich p mal e plus p mal i mal e Schau mal nach http://www.rn-wissen.de/index.php/Regelungstechnik#PI-Regler und scroll ein wenig runter, bis zum Abschnitt: Alternative PID-Reglerstruktur Dort ist ein Schaubild, welches den Zusammenhang mit einem analogen Regler zeigt. Dort ist zu sehen, dass der Ausgang vom P-Regler unter anderem in den I-Regler hineingeht. Damit ist klar, dass ein verändern von Kp auch auf den I-Regler einwirkt. Inwieweit das charakteristisch ist, kann ich nicht sagen. Aber ich denke, dass die Jungs von RN mehr von analoger Regeltechnik verstehen als ich (und das ist keine große Kunst :-).
Angehängte Dateien:
-

PID.png
3,6 KB
{kind=link}
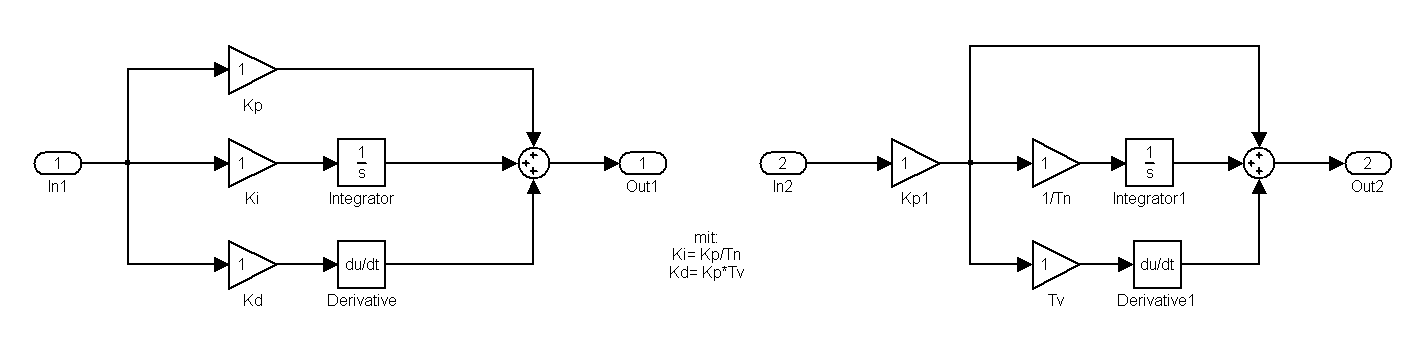
Hi, die Darstellung mit Tn und TV kommt eher aus der "alten" analogen Regelungstechnik. Das Tn (Nachstellzeit) und Tv (verzugszeit) lassen sich gut an der Sprungantwort des PID-Reglers sehen. Die Darstellung mit KI,Kp udn Kd ist eine reine Umrechnung der Tn,Tv,Kp darstellung. (siehe Bild) Der Kp Anteil wird einfach vor den Verzweigungspunkt "geschoben". Dadurch "wirkt" das Kp nun auch im D- und im I-Zweig des Reglers. Da gilt: Ki=Kp/Tn und KD=Kp*Tv muss im I-Zweig noch mit 1/Tn und im D-Zweig mit Tv multipliziert werden. Also du siehst, es ist nur eine andere Darstellung.
Jede der Darstellungen ist für bestimmte Auslegungsverfahren geeignet. Wenn man z.B. mit den 2 NST eines PIDs Pole der Strecke kompensieren will und anschließend mit EINER Verstärkung die Bandbreite erhöhen möchte, ist es durchaus sinnvoll, wenn man nicht wieder an 3 Parametern kurbeln muss.
Es wird vielleicht auch etwas klarer wenn man sich die Erklärung für Dummies vergegenwärtigt: Der I-Anteil erhöht pro Tn das Ausgangssignal um den Wert des P-Anteils. Einfaches Beispiel Eine auftretende Regelabweichung generiert ein Signal von 1. Nach Tn ist das Signal 2, nach 2Tn 3, nach 3Tn 4 usw.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.