hallo zusammen,
ich bin grad dabei das grundgerüst eines kleinen roboters mit 2 rädern
aufzubauen. die beiden räder dienen sowohl als antrieb als auch zu
lenkung. ähnlich diesem hier:
http://w3-o.cs.hm.edu/~mfischer/SS2006/Pioneer3DX.jpg
mein problem ist die PWM für die 2 motoren.
ich benutze einen ATmega88 und als treiber einen L6206N. datenblatt zum
treiber gibts hier:
http://www.datasheetcatalog.net/de/datasheets_pdf/L/6/2/0/L6206N.shtml
soweit hab ich alles verbunden und es funktioniert auch. lediglich die
PWM funktioniert nicht so wie ich mir das wünsche. ich habe,
entsprechend dem treiber datenblatt, die pins wie folgt verbunden:
für motor 1:
IN1_A -> PD5
IN2_A -> PD0
für motor 2:
IN1_B -> PD6
IN2_B -> PD1
gewählt ist PWM mode 5, also phase correct. dieser funktioniert auch
soweit, lediglich mit dem vorwärts und rückwärtslauf hab ich enorme
probleme. in der main wird anfangs die PWM_init ausgeführt und in der
hauptschleife die PWM_Speed funktion.
mit der funktion "PWM_Speed" möchte ich den gewünschten pwm-wert und die
laufrichtug realisieren. wenn ich beide motoren in die gleiche richtung
laufen lasse funktioniert alles soweit, aber wenn ich eine
unterschiedliche laufrichtung vorgeb verhalten sie sie komplett anders
und drehen plötzlich viel schneller.
irgendwo ist der wurm drin und ich hab absolut keine ahnung wo.
ich hoffe ihr könnt mir helfen.
gruß
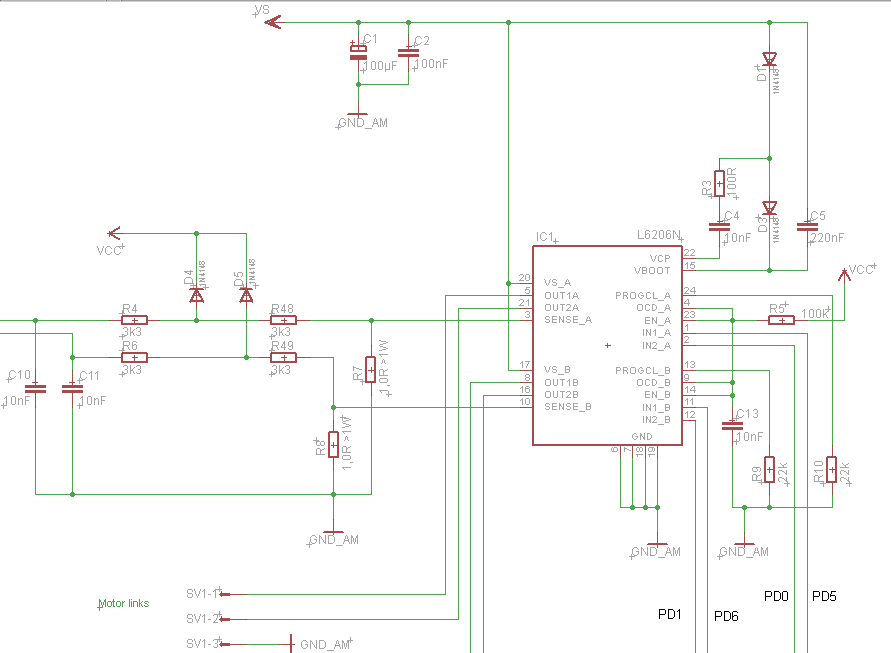
ich hab mal den teil des L6206 beigfügt.
die beiden IN1 und IN2 leitungen sind direkt an die oben genannten pins
angeschlossen.
ich benutze eine pwm frequenz von 36 kHz. prescaler ist 1, da meine cpu
eine frequenz von 18,432 MHz hat.
diese 36 kHz liegen an den pins PD5 und PD6 an. je nachdem welchen wert
ich an OCR0A und OCR0B ändere ich das tastverhältnis dieser frequenz. an
den pins PD0 und PD1 liegt je nach vorwärts oder rückwärtslauf nur ein
high- oder low-pegel an.
ich steh grad echt aufm schlauch :)
36 kHz sind recht schnell, versuch mal kleiner 1kHz.
Wenn In1 und In2 gleiche Signallage haben, wird der Motor
kurzgeschlossen und bremst mit vollem Moment. Daher sollte der PWM auf
den Enable.
Axel
"pfeift" der motor dann nicht wenn ich ihn bei 1 kHz betreibe?
auf enable, verstehe. aber gäbe es auch eine möglichkeit die motoren
bzw. den treiberbaustein auf die art und weise zu benutzen wie ich ihn
angeschlossen habe?
Nein, das ist schon richtig so, dass die Motoren kurzgeschlossen werden
müssen, das nennt man Zwangskommutierung.
Enable heißt deswegen so, weil man damit die Funktionseinheit
einschaltet nicht weil man damit pulst. Einige Treiber haben auf dem
Enable sogar Filter drin, so dass ein Pulsen hier nicht möglich ist.
Der Fehler ist schon im Quelltext...
Werd gleich mal in Ruhe drübersehen.
Grüße,
Peter
Diese Zeile gefällt mit so garnicht:
PORTD = !(_BV(OC0A_R) | _BV(OC0B_R)); // Internal Pull-Ups low
"!" ist ein logischer operator, kein bitweiser.
aber vielleicht finde ich noch mehr...
Edit:
Abgesehen davon, sind die Richtungspins Ausgänge, da muss man keine
Pullups setzen.
bitte entschuldigt meine verspätete antwort, mein internet wollte
gestern abend nicht so wie ich wollte :( konnte mich partout nicht mehr
einloggen.
erstmal danke für eure hilfe :)
@Peter
ich hab deine vorschläge natürlich sofort umgesetzt und die drehrichtung
funktioniert jetzt wunderbar. nur hab ich jetzt ein problem mit der
geschwindigkeit.
wenn ich die motoren in die gleiche richtung drehen lasse:
z.b. beide vorwärts (rückwärts geht analog dazu) mit einem pwm-wert von
180
also PWM_Speed(180,FORWARD,180,FORWARD);
drehen sie sich recht langsam.
wenn ich nun aber die drehrichtung umkehre:
also PWM_Speed(80,BACKWARD,80,FORWARD);
muss ich den pwm-wert von 180 auf 80 runtersetzen um eine ungefähr
gleiche drehzahl zu erhalten.
irgendwie verwirrt mich das jetzt schon wieder :)
edit:
edit geht nicht als gast, werd mich gleich mal registrieren.
ok, mein fehler, is klar warum ich die verschiedenen drehzahlen bekomme.
zum einen wird 180 an die funktion übergeben. dadruch ergeben sich die
pwm-werte für vorwärts von 180 und rückwärts von 255-180=75
kein wunder das die sich dann unterschiedlich schnell drehen.
>ok, mein fehler, is klar warum ich die verschiedenen drehzahlen bekomme.
Nein, das ist eigentlich nicht klar.
Die Wirkrichtung vom PWM muss ja umgedreht werden, da der Motor umgepolt
wird. So wie ich es geschrieben habe, sollte das beides die gleiche
Geschwindigkeit liefern, nur das eine andersherum:
PWM_Speed(180,FORWARD,180,FORWARD);
PWM_Speed(180,BACKWARD,180,BACKWARD);
Läuft der Motor vorwärts, bedeutet das folgende, dass der Motor steht:
OCR0A/B = 0
Läuft der Motor vorwärts, bedeutet das folgende, dass der Motor mit
maximaler Geschwindigkeit läuft:
OCR0A/B = 255
Läuft der Motor rückwärts, bedeutet das folgende, dass der Motor steht:
OCR0A/B = 255
Läuft der Motor rückwärts, bedeutet das folgende, dass der Motor mit
maximaler Geschwindigkeit läuft:
OCR0A/B = 0
Damit die Eingabewerte von PWM_Speed in beiden Laufrichtungen der
Geschwindigkeit entsprechen, habe ich im einen Fall den Sollwert von 255
subtrahiert.
Warum das nicht funktioniert, ist mir momentan ohne den vollständigen
Schaltplan und Quellcode nicht klar.
Grüße,
Peter
ja genauso hatte ich das gemeint, hab mich nur etwas unglücklich
ausgedrückt.
ich habe in diesem fall:
PWM_Speed(180,FORWARD,180,FORWARD);
eine bestimmte drehzahl am rad erhalte.
wenn ich ich nun die richtung auf rückwärts ändere, sprich:
PWM_Speed(180,BACKWARD,180,BACKWARD);
erhalte ich ungefähr dieselbe drehzahl, allerdings ist sie leicht
niedriger. diese differenz, so nehme ich an, kommt höchstwahrscheinlich
vom mechanischen aufbau der räder und getriebe. im vorwärtslauf läuft
das getriebe deutlich runder als im rückwärtslauf. ist nicht ganz so
schön gefertigt und zusammengebaut, geb ich zu :)
aber soweit passt alles ja noch. mein problem mit der stark veränderten
drehzahl tritt dann auf, wenn ich 2 verschiedene laufrichtungen
angegeben habe. also so:
PWM_Speed(180,FORWARD,180,BACKWARD);
oder grad umgekehrt ist es das gleiche. ich habe plötzlich eine deutlich
höhere drehzahl am rad, trotz gleichbleibendem pwm-wert.
kann mir wirklich nicht vorstellen warum das so sein kann.
der quellcode den ich im ersten beitrag gepostet habe ist eigentlich
alles. ich hatte noch eine ADC-wandlungsroutine und eine
I2C-kommunikation drin, die ich aber alle auskommentiert habe. somit hab
ich nur das was ich oben gepostet habe.
der schaltplan is soweit eigentlich auch vollständig. der L6206 treiber
ist nur mit insgesamt 6 pins des atmegas verbunden. 2 davon dienen zur
erfassung des motorstromes über einen shunt-wiederstand (links in dem
geposteten schaltplan) und die restlichen 4 sind mit den oben genannten
ports verbunden. der rest des schaltplans besteht nur noch aus dem
atmega88 und dessen anschlüsse zur spannungsversorung und
programmierleitungen.
kann mir nicht vorstellen das es da ein problem geben soll, zumal der µC
ja alle sonstigen aufgaben problemlos erfüllt. also die genannte
I2C-kommunikation und die ADC-wandlungsroutine.
>PWM_Speed(180,FORWARD,180,BACKWARD);>oder grad umgekehrt ist es das gleiche. ich habe plötzlich eine deutlich>höhere drehzahl am rad, trotz gleichbleibendem pwm-wert.
Ich denke mal, das liegt daran, dass die Motoren im einen Fall
gleichzeitig die Stromversorgung belasten und im Problemfall durch die
PWM immer abwechselnd. Dadurch ergibt sich eine höhere durchschnittliche
Spannung zur Versorgung, was zu einer höheren Drehzahl an beiden Motoren
führt.
Das müsste man sich mal auf Papier aufmalen, wie sich das genau mit der
Pulsmustererzeugung auf die Belastung der Stromversorgung auswirkt.
Vielleicht kann man ja einen anderen PWM-Modus nehmen und damit etwas
verbessern.
Grüße,
Peter
{kind=link}