Hallo,
ich versuche momentan ein 5V TTL Signal eines PIR auf meinen uc zu
bekommen. Ich habe den Vout direkt ohne zusätzlichen Pullup anden uc
angeschlossen. Das DDR auf Eingang und die Internen Pullups aus.
Doch es tut sich nichts.
Wenn ich versuche zu programmieren spinnt das Board/AVR Studio und liest
dauernd ne andere Signatur, sagt Fehler im Flash usw... Wenn ich alle
Kabel entferne geht das programmieren wieder wie gewohnt. Also muß es am
Programm liegen. Hab die Pullups schon ein und ausgeschaltet; hatte
jedoch keine Veränderung.
Hier mal der Code:
#include <avr/io.h>
int main(void)
{
DDRD = 0x00;
PORTD= 0x00;
DDRC = 0xFF;
PORTC = 0xFF;
while(1)
{
if (!(PIND & (1 << PD2)))
{
PORTD ^= (1<<PD2);
}
}
}
Vielleicht kann ja mal einer drauf gucken und mir nen Tip geben.
Thomas H. schrieb: > Hallo, > > ich versuche momentan ein 5V TTL Signal eines PIR So, welchen denn? > auf meinen uc Gott schütze die Erfindung des einzig wahren Einheitsmikrocontrollers! > zu > bekommen. Ich habe den Vout direkt ohne zusätzlichen Pullup anden uc > angeschlossen. Das DDR auf Eingang und die Internen Pullups aus. > Doch es tut sich nichts. > > Wenn ich versuche zu programmieren spinnt das Board/AVR Studio und liest > dauernd ne andere Signatur, sagt Fehler im Flash usw... Wenn ich alle > Kabel entferne geht das programmieren wieder wie gewohnt. Eine Veränderung an der Hardware bringt Besserung, also muß es sich nach Scheibenweltlogik zwangsläufig um ein Softwareproblem handeln? > Also muß es am > Programm liegen. Hab die Pullups schon ein und ausgeschaltet; hatte > jedoch keine Veränderung. > > Hier mal der Code: > > #include <avr/io.h> > > int main(void) > { > DDRD = 0x00; > PORTD= 0x00; > > DDRC = 0xFF; > PORTC = 0xFF; > > while(1) > { > if (!(PIND & (1 << PD2))) > { > PORTD ^= (1<<PD2); > } > } > } > > Vielleicht kann ja mal einer drauf gucken und mir nen Tip geben. Pin PD2 wird abgefragt und soll gleichzeitig was ausgeben? PORTC hat überhaupt keine Funktion?
Warum muß man denn immer gleich so auf jemandem rumhacken?! Es hat doch jeder mal klein angefangen -.- ... Controller ist ein ATMEGA8. Und beschaltet habe ich den 0/5V Ausgang des PIR mit einem Widerstand von 1kOhm auf PD2 gegen Kurzschluss. Die Kontroll LED liegt an PC1. Bei HIGH des PIR messe ich 4,94V und bei LOW 33mV. Pullups habe ich nun ausgemacht und den Code so korrigiert: #include <avr/io.h> int main(void) { DDRD = 0x00; PORTD= 0x00; DDRC = 0xFF; PORTC = 0xFF; while(1) { if (!(PIND & (1 << PD2))) { PORTC ^= (1<<PC1); } } } Leider blinkt die LED nach wie vor nicht.
Er ist bei LOW auf Masse und bei HIGH auf 5V. Ich kann immer sehen wann er (ungefähr) schaltet, weil ich mein MM dran hab.
> Und beschaltet habe ich den 0/5V Ausgang des PIR ....
So richtig gut zur Kommunikation zwischen Elektronikern hat sich ein
Medium namens "Schaltplan" bewährt. Hast du so einen? Wie sieht der aus?
Idealerweise incl. der Programmierschinttstelle, der Reset-Beschaltung,
benamten Bauteilen (sonst muß man immer vom Widerstand "rechts oben"
reden)...
Wärs nicht trotzdem viel einfacher, wenn du kurz die Typenbezeichnung des "PIR" hinschreiben würdest, damit eventuell Interessierte mal einen Blick auf das entsprechende Datenblatt werfen können? Und was das Programm angeht, blinkt die LED denn, wenn du abwechselnd mit einem Draht über einen 1K Widerstand mal GND und mal VCC auf PD2 legst?
Angehängte Dateien:
-

Schaltbild.JPG
17 KB
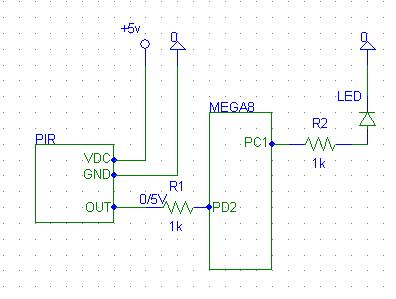
Schaltplan siehe oben. Das Datenblatt http://www.roboter-teile.de/datasheets/KC7783R.pdf Auch der Trick mit dem Kurzschließen über den Widerstand führt zu keinem Erfolg. Mein Schädel brummt und ich weiß nicht weiter.. hmpf.
Thomas H. schrieb: > Schaltplan siehe oben. > > Das Datenblatt > Ja da wirds schon lichter, das ist kein nackter PIR-Sensor, (Wobei "PIR" ja auch sonst alles mögliche hätte sein können, gib den Begriff einfach mal in Google ein ...), sondern ein komplettes PIR-Modul. Und dieses Modul liefert entweder 5V am Ausgang oder ... (Trommelwirbel), gar nichts (kein GND)! D.h. der Eingangspin PD2 muß erst einmal mit einem 10K Widerstand direkt auf Masse gelegt werden und der Ausgang des PIR-Moduls wird dann entweder direkt oder wenn man will über einen Widerstand 330 bis 1000 Ohm an PD2 angeschlossen. http://www.mikrocontroller.net/articles/AVR-GCC-Tutorial#Eing.C3.A4nge_.28Wie_kommen_Signale_in_den_.C2.B5C.29"; > http://www.roboter-teile.de/datasheets/KC7783R.pdf > > Auch der Trick mit dem Kurzschließen über den Widerstand führt zu keinem > Erfolg. Da hast du ja hoffentlich vorher das PIR-Modul weggemacht, nicht dass es noch Schaden nimmt? Trotzdem, das mit dem testweise VCC über 1K Widerstand kurz auf PD2 gehen, muss natürlich erst mal, auch ganz ohne PIR-Modul, funktionieren sonst stimmt mit dem Programm irgendwas nicht. > Mein Schädel brummt und ich weiß nicht weiter.. hmpf.
Hi Hast du beachtet, das der Sensor eine Einschaltverzögerung von 24s hat? MfG Spess
Jetzt geht es! Ich habe mal probiert mit 330 Ohm statt der 1k kurzzuschliessen. Und es geht! Beim PIR dasselbe.. Puh. Ich hab schon gedacht das Wochenende wird n Reinfall, aber nun :-) Danke an alle, die mitgedacht haben.
Thomas H. schrieb: > while(1) > { > if (!(PIND & (1 << PD2))) > { > PORTC ^= (1<<PC1); > } > } Ohne zu wissen, wie lange ein PIR denn den Eingang auf Low lässt: Du weißt, dass dein Code die LED nicht nur einmal toggelt, sondern ziemlich oft und ziemlich schnell nacheinander, geschätzt alle 10-15 Takte, solange PIND2 low ist? Daher ist es eher Zufall, in welchem Zustand sie nach dem Abschalten ist... MfG, Heiko
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.